Improving Off-Road Vehicle Handling Using an Active Anti-Roll
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Design and Analysis of Suspension System for an All Terrain Vehicle
International Journal of Scientific & Engineering Research, Volume 7, Issue 3, March-2016 164 ISSN 2229-5518 DESIGN AND ANALYSIS OF SUSPENSION SYSTEM FOR AN ALL TERRAIN VEHICLE Shijil P, Albin Vargheese, Aswin Devasia, Christin Joseph, Josin Jacob Abstract—In this paper our work was to study a. Study the static and dynamic parameters of the the static and dynamic parameter of the suspension system chassis. of an ATV by determining and analyzing the dynamics of b. Workout the parameters by analysis, design, and the vehicle when driving on an off road racetrack. Though, optimization of suspension system. there are many parameters which affect the performance of c. Study of existing suspension systems and the ATV, the scope of this paper work is limited to parameters affecting its performance. optimization, determination, design and analysis of d. Determination of design parameters for suspension systems and to integrate them into whole vehicle suspension system. systems for best results. The goals were to identify and optimize the parameters affecting the dynamic performance suspension systems Index terms—All terrain vehicle, suspension, caster angle, within limitations of time, equipment and data from camber angle, toe angle, roll centre manufacturer. In this paper we will also come across the following aspects IJSER negotiate a wider variety of terrain than most other vehicles. Although it is a street-legal vehicle in some countries, it is not legal within most states and provinces of Australia, the United States and 1.INTRODUCTION Canada and definitely not in India. By the current An All-Terrain Vehicle (ATV) is defined ANSI definition, it is intended for use by a single by the American National Standards Institute operator, although a change to include 2-seaters is (ANSI) as a vehicle that travels on low pressure under consideration. -

Download Article
addendum Setting a Hundred-Year Standard Remembering Panhard and Levassor, the company that invented the first manual transmission. Alex Cannella, Associate Editor 20th century French automobile to Bordeaux and back, before the hobby company Panhard and Levassor ultimately claimed his life in 1897 in a fatal were always unconventional. racing accident. Panhard, the other mind Sometimes, their deviations from the norm of the pair, would pass on, as well, a decade didn’t quite pan out. For example, one car, later. the Panhard and Levassor Dynamic, fea- The company’s innovations didn’t stop tured the driver seat in the middle of the car, after its two founders had passed, however. with passengers on either side, for a few years Most notably, they eventually developed the before the design was scrapped as awkward and “Panhard rod,” an early suspension rod that you impractical. can still find on some cars today. But while Panhard and Levassor’s innovations But here again, Panhard and Levassor the com- sometimes ended in a few evolutionary dead ends, pany continued to put out less well-known innova- some also resulted in a lot of the automotive industry’s first big tions for transmission systems. It was never anything huge or steps that are still standard practice today. flashy, but fundamental steps forward towards what we com- They were the first to start mounting the engine on the front monly recognize today as a modern transmission. Enclosed of the car. Before the turn of the 20th century, when automo- gearboxes in 1895. Quadrant changing four-speed transmis- biles were more still mostly motor buggies, the engine was often sions in 1903. -

TJM 4X4 Performance Suspension Parts Brochure
›› › SUSPEN SUSPENSUSPENSSSIONIONION Suspension Information 2 | Suspension We started it Founded on mateship in 1973, TJM is the Aussie pioneer of 4WD equipment. We’re tried and proven Australia’s rugged, yet diverse landscape has provided the ideal testing ground. Whether your journey takes you on or off road, for work or play, TJM has the gear you can depend on. We’re tough, yet sophisticated Using the latest engineering and manufacturing technology, our products are exposed to stringent testing and thorough quality assurance procedures to guarantee our customers receive nothing but the best. Everybody wants a piece of us Our research and development team brings leading-edge and performance-driven products. We’re the experts not just on our home turf but also offshore, so it’s not surprising TJM’s Aussie innovations are exported around the globe. Suspension | 3 IF YOU’RE GOING BUSH, BOUNDING OVER A BUMPY BUILDING SITE OR HAULING A CARAVAN ACROSS THE COUNTRY, TJM HAS A SUSPENSION SYSTEM TO SUIT YOUR 4WD. If wheels were your car’s feet, then suspension would be the legs. Just as the strength, length and flexibility of your legs impact on the way in which you move and the way you connect to the ground, different types of suspension determine the functionality, safety and comfort of your vehicle on different terrain. Made up of several parts that work together like joints and bones, suspension affects absolutely every aspect of driving. TJM XGS GOLD SUSPENSION Given the importance of suspension, it’s surprising how frequently people place priority on installing bull bars, roof racks and other 4WD accessories without even considering their suspension needs. -

Automotive Service Modern Auto Tech Study Guide Chapter 67 & 69 Pages 1280 1346 Suspension & Steering 32 Points Automotive Service 1
Automotive Service Modern Auto Tech Study Guide Chapter 67 & 69 Pages 1280 1346 Suspension & Steering 32 Points Automotive Service 1. The ____________________ system allows a vehicle’s tires & wheels to move up and down as they roll. Steering Suspension Brake Automotive Service 2. Suspension can be grouped into 2 broad categories: _________________ & ________________. Independent & Nonindependent Coil Springs & Air Springs Active & Passive Automotive Service 3. The perfect suspension system balances understeer and oversteer, resulting in ______________ steering. Tight Neutral Loose Automotive Service 4. Compressing springs is known as ________. As springs extend, they are said to ________. Jounce, Rebound Bounce, Resound Dribble, Rebound Automotive Service 5. Springs can be one of 4 types: A. _________, B. __________, C. _________________ ______, & D. _______. Coil Leaf Air Torsion Bar Automotive Service 6. ______________ weight is all of the weight supported by the springs. __________________ weight is all of the weight not supported by the springs. The more sprung weight, the better the vehicle will ride. Spring, Unspring Sprang, Unsprang Sprung, Unsprung Automotive Service 7. Control arms are connected to the steering knuckles with pivoting joints called ___________ joints. Automotive Service Automotive Service 8. __________ ______________ limit spring oscillations (jounce & rebound), but don’t effect ride height Slack Absorbers Shock Absorbers Shock Restorers Automotive Service 9. ______ shocks are filled with low pressure nitrogen gas to prevent fluid aeration (bubble formation). Gas Water Air Automotive Service 10. Options on shock absorbers include the ___________________________ feature & adjustable stiffness. SelfLeveling SelfIgniting SelfEnergizing Automotive Service Automotive Service Automotive Service 11. A ______ assembly consists of a shock, coil spring & an upper damper/pivot bearing. -
Wl002 Installation Instructions
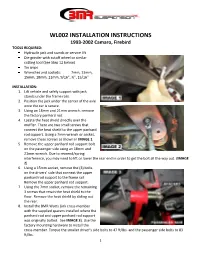
WL002 INSTALLATION INSTRUCTIONS 1993-2002 Camaro, Firebird TOOLS REQUIRED: Hydraulic jack and stands or service lift Die grinder with cutoff wheel or similar cutting tool (See Step 12 below) Tin snips Wrenches and sockets: 7mm, 13mm, 15mm, 18mm, 21mm, 9/16”, ¾”, 15/16” INSTALLATION: 1. Lift vehicle and safely support with jack stands under the frame rails. 2. Position the jack under the center of the axle once the car is secure. 3. Using an 18mm and 21mm wrench, remove the factory panhard rod. 4. Locate the heat shield directly over the muffler. There are two small screws that connect the heat shield to the upper panhard rod support. Using a 7mm wrench or socket, remove these screws as shown in IMAGE 1. 5. Remove the upper panhard rod support bolt on the passenger side using an 18mm and 21mm wrench. Due to rearend/spring interference, you may need to lift or lower the rear end in order to get the bolt all the way out. (IMAGE 2) 6. Using a 15mm socket, remove the (3) bolts on the drivers’ side that connect the upper panhard rod support to the frame rail. Remove the upper panhard rod support. 7. Using the 7mm socket, remove the remaining 3 screws that retain the heat shield to the floor. Remove the heat shield by sliding out the rear. 8. Install the BMR Watts Link cross-member with the supplied spacers installed where the panhard rod and upper panhard rod support was originally bolted. See IMAGE 3). Use the factory mounting hardware to install the cross-member. -

Morgan Roadster Lightweight
MSCC Techniques Speed Championship If you are thinking of sprinting your Morgan, you may be surprised to find that very little work is necessary to comply with the regulations to enable you to compete. The fitting of a roll over bar, timing strut and identifying the ignition key is all that is required! Race suit, helmet and gloves, apply for your licence and you’re off…! Below is a list of work that will improve safety and performance, but most is not compulsory. Why not give it a try. Contact Chris Bailey on 07889 722 333, 01924 201086 or via email [email protected] for further information about the Techniques Speed Championship. Roll Over Bars (Compulsory) Stainless Steel Braided Brake Hose A Roll Over Bar is compulsory for the Speed Championship. (Recommended but not compulsory) We can supply and fit Roll Over Bars or full racing ‘cages’ For a firmer brake pedal and better protection of the according to MSA and FIA regulations. brake hoses we recommend the fitting of stainless braided brake lines. Fire Extinguishers (Recommended but not compulsory) We fit our extinguisher systems either in the passenger Adjustable Shock Absorbers (Recommended but not compulsory) footwell or under the rear parcel shelf on the Challenge race Morgans. However for Sprinting a hand held The fitting of adjustable shock absorbers from the leading extinguisher is suitable. makers AVO, SPAX and Koni will enable you to fine tune the suspension for all weather conditions. Race Seats (Recommended but not compulsory) Brake Reaction Bars (Recommended but not compulsory) A correctly installed race seat tailored to the drivers needs is often the most noticed improvement by a Race driver and These bars are fitted between the top of the front frame can be measured by quicker lap times. -

Driving Near the Limits Dick Maybach, Appalachian Region – PCA [email protected] January 13, 2018
Driving Near the Limits Dick Maybach, Appalachian Region – PCA [email protected] January 13, 2018 This work is licensed under the Creative Commons Attribution-noncommercial 4.0 International License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc/4.0/ or send a letter to Creative Commons, PO Box 1866, Mountain View, CA 94042, USA. You are free to: • Share – copy and redistribute the material in any medium or format • Adapt – remix, transform, and build upon the material • The licensor cannot revoke these freedoms as long as you follow the license terms. Under the following terms: • Attribution – You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. • NonCommercial – You may not use the material for commercial purposes. • No additional restrictions – You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits. This article has two main topics, vehicle dynamics and driving techniques, and concludes with a brief recap. We’ll begin vehicle dynamics by looking at a single tire, because all forces, whether you’re accelerating, braking, or turning, are applied through your tires. Next we’ll look at understeer and oversteer. Understanding these key concepts is essential to maintain control of your car as you maneuver. Another important aspect of vehicle dynamics is weight shifting. As your car changes speed and direction, the distribution of traction among your tires also changes. -

M-2300-T 6-Piston Mustang Brake Kit INSTALLATION INSTRUCTIONS
M-2300-T 6-Piston Mustang Brake Kit INSTALLATION INSTRUCTIONS NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD RACING PERFORMANCE PARTS. Please visit www.fordracingparts.com for the most current instruction information ! ! ! PLEASE READ ALL OF THE FOLLOWING INSTRUCTIONS CAREFULLY PRIOR TO INSTALLATION. AT ANY TIME YOU DO NOT UNDERSTAND THE INSTRUCTIONS, PLEASE CALL THE FORD RACING TECHLINE AT 1-800-367-3788 ! ! ! Component Number Component Description Qty BRAKE KIT 6 Piston Brake Kit 1 DR3V-1125-CC Front Rotor Assembly 2 DR3V-2078-FA RH Brake Hose 1 DR3V-2B118-EB RH Front Caliper 6 Piston 1 DR3V-2B119-EB LH Front Caliper 6 Piston 1 DR3V-2B557-FA LH Brake Hose 1 DR3V-2C026-BA Rear Rotor 2 DR3V-2K004-CA RH Disk Brake Shield 1 DR3V-2K005-CA LH Disk Brake Shield 1 DR3V-2K327-AA LH Rear Caliper 1 DR3V-2K328-AA RH Rear Caliper 1 W500020-S439 Bolt, Backing Plate 4 W705821-S439 Caliper Bolt to Adaptor Brake Kit 1 W710233-S439 Caliper Mount Bolt M12X1.75X65 4 DR3Z-2C100-A RH Rear Support Bracket 1 DR3Z-2C101-A LH Rear Support Bracket 1 Material Item Specification High Performance DOT 3 WSS-M6C62-A or Motor Vehicle Brake Fluid WSS-M6C65-A1 PM-1-C (US); CPM-1-C (Canada) Factory Ford shop manuals are available from Helm Publications, 1-800-782-4356 Techline 1-800-367-3788 Page 1 of 29 IS-1850-0418 M-2300-T 6-Piston Mustang Brake Kit INSTALLATION INSTRUCTIONS NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD RACING PERFORMANCE PARTS. -

Suspension and Steering Inspection Proceedure.PDF
ELECTRICAL AND MECHANICAL VEHICLE G 188-1 ENGINEERING INSTRUCTIONS Issue 2, Aug 09 TRUCK, LIGHTWEIGHT, MC2, LAND ROVER 110 4X4 – ALL TYPES TRUCK, LIGHT, MC2, LAND ROVER 110 6X6 SUSPENSION AND STEERING INSPECTION PROCEDURE EQUIPMENT INSPECTION AND EXAMINATION DATA This instruction is authorised for use by command of the Chief of the General Staff. It provides direction, mandatory controls and procedures for the operation, maintenance and support of equipment. Personnel are to carry out any action required by this instruction in accordance with GENERAL A 001. Introduction 1. This instruction details the criteria for the inspection of the suspension and the steering on the Land Rover 110 4x4 and 6x6 to assess wear in suspension and steering components. Associated Publications 2. Reference may be necessary to the latest issue of the following documents: a. EMEI Vehicle A 291-1 – Tyres and Tubes – Care and Maintenance of B Vehicles; b. EMEI Vehicle A 291-5 – Tyres and Tubes – General Service B Vehicle Tyre Guide; c. EMEI Vehicle A 298-2 – Tyres and Tubes – Inspection for Useability; d. EMEI Vehicle G 103 – Truck, Utility, Lightweight And Truck, Utility, Lightweight, Winch, Mc2 - Land Rover 110 4x4 – Light Grade Repair; e. EMEI Vehicle G 104-1 – Truck, Utility, Lightweight And Truck, Utility, Lightweight, Winch, Mc2 - Land Rover 110 4x4 – Medium Grade Repair; f. EMEI Vehicle G 109 – Truck, Utility, Lightweight And Truck, Utility, Lightweight, Winch, Mc2 - Land Rover 110 4x4 – Servicing Schedule; g. EMEI Vehicle G 189-11 – Reclamation of Panhard Rod, Rear Lower Link and Radius Arm Mounts; h. EMEI Vehicle G 197-13 – Fitting of Coil Spring Retainers; i. -

Analytical Models Correlation for Vehicle Dynamic Handling Properties
Analytical Models Correlation for Vehicle Dynamic Handling Properties Analytical Models Correlation for Daniel Vilela [email protected] Vehicle Dynamic Handling Properties General Motors do Brasil Ltda. Analytical models to evaluate vehicle dynamic handling properties are extremely Vehicle Synthesis interesting to the project engineer, as these can provide a deeper understanding of the Analysis and Simulation Dept. underlying physical phenomena being studied. It brings more simplicity to the overall Sao Caetano do Sul solution at the same time, making them very good choices for tasks involving large 09550-051 SP, Brazil amounts of calculation iterations, like numerical optimization processes. This paper studies in detail the roll gradient, understeer gradient and steering sensitivity vehicle dynamics metrics, starting with analytical solutions available in the literature for these Roberto Spinola Barbosa metrics and evaluating how the results from these simplified models compare against real [email protected] vehicle measurements and more detailed multibody simulation models. Enhancements for Escola Politécnica da Universidade de São Paulo these available analytical formulations are being proposed for the cases where the initial Departamento de Engenharia Mecânica results do not present satisfactory correlation with measured values, obtaining improved Sao Paulo analytical solutions capable of reproducing real vehicle results with good accuracy. 05508-900 SP, Brazil Keywords: handling, vehicle dynamics, analytical solution, -

Car Suspension and Handling Fourth Edition
Car Suspension and Handling Fourth Edition List of Chapters: Preface to the Fourth Edition 3.8 Tire Uniformity 3.9 Aspect Ratios Preface to the First Edition 3.10 Tire Selection and Air Chamber Geometry Notation 3.11 References Chapter 1 Introduction Chapter 4 Steering 1.1 Scope and Layout of the Book 4.1 Dynamic Function of the Steering 1.2 The Function of the Suspension System System 4.2 Steering Angles: Effects of Tire Slip 1.3 Suspension Geometry Angles and Steering and Suspension 1.4 Kinematics and Compliance (K&C) Kinematics 1.5 Vehicle Dynamics 4.3 Relative Positions of Front- and Rear- 1.6 References Wheel Tracks 4.4 Understeer and Oversteer Chapter 2 Disturbances and Sensitivity 4.5 Directional Stability 2.1 Road Irregularities 4.6 Torque in the Steering System 2.2 Influence of Wheel Size 4.7 Steering Torque Effects Due to 2.3 Subjective Assessment of Ride Steering Geometry 2.4 Human Sensitivity to Vibration 4.8 The Steering Column 2.5 Measurement Standards for Vibration 4.9 Steering Gear 2.6 Influence of Noise on Assessment of 4.10 Constant Velocity (CV) Driveshaft Ride Comfort Joints 2.7 Influence of Phase of Differential 4.11 Torque Steer Effects Vibration on Assessment of Ride 4.12 Front-Wheel Steering Oscillations— Comfort Shimmy 2.8 References 4.13 Power Assistance 4.14 Electric Power Steering Chapter 3 The Wheel and Tire 4.15 Rear-Wheel Steering Systems 3.1 Introduction 4.16 References 3.2 The Wheel Rim 3.3 Tire Size Designation Chapter 5 Suspension Systems and 3.4 Tire Construction Types Their Effects 3.5 Tire Properties -

Suspension by Design
Version 5.114A June 2021 SusProg3D - Suspension by Design Robert D Small All rights reserved. No parts of this work may be reproduced in any form or by any means - graphic, electronic, or mechanical, including photocopying, recording, taping, or information storage and retrieval systems - without the written permission of the publisher. Products that are referred to in this document may be either trademarks and/or registered trademarks of the respective owners. The publisher and the author make no claim to these trademarks. While every precaution has been taken in the preparation of this document, the publisher and the author assume no responsibility for errors or omissions, or for damages resulting from the use of information contained in this document or from the use of programs and source code that may accompany it. In no event shall the publisher and the author be liable for any loss of profit or any other commercial damage caused or alleged to have been caused directly or indirectly by this document. Printed: June 2021 Contents 3 Table of Contents Foreword 0 Part 1 Overview 12 1 SusProg3D................................................................................................................................... - Suspension by Design 12 2 PC hardware................................................................................................................................... and software requirements 14 3 To run the..................................................................................................................................