Minimum Distance Queries for Haptic Rendering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shots, Uses, Deployment and Recovery
SHOTS AND DECOMPRESSION RIGS – CONSTRUCTION, DEPLOYMENT AND RECOVERY SHOT USE AND CONSTRUCTION A shot offers the simplest and most direct route from the surface to the seabed. In it’s simplest form is consists of a buoy, line and weight. The buoyancy of the buoy should be sufficient to support the weight. The shot line should be of sufficient strength to support the shot weight, long enough to reach the seabed and be sufficiently thick to aid recovery. Once deployed the shot also offers a surface reference point or datum point from which searches may be conducted. A shot line in some form also offers a stable platform for decompression stops. It is possible to use a boat’s anchor as a shot line however this has several drawbacks. Firstly a cover boat should be mobile at all times. The datum line will not be vertical and the line will alter with the movement of the boat. If the site is environmentally sensitive it may be inadvisable to anchor. As a result of the nature of shot construction it can be seen that the shot line must always be significantly longer than the proposed depth. Once the shot is deployed the excess line will form an angle to the seabed in a current or offer potential entanglement in slack water. There are several ways of tensioning a shot line. Top Tensioned Shot This shot will adjust with the rise and fall of the tide and offers a near vertical descent and ascent. However this configuration is not ideal in strong current or wind. -

Diving Procedures Manual
Diving Procedures Manual Emergency Contacts Flinders University Security (24hrs) (08) 8201 2880 University Diving Officer Matt Lloyd – 0414 190 051 or 8201 2534 Charlie Huveneers (S&E) – 0405 635 257 or 8201 2825 Faculty Diving Administrators John Naumann (EHL) – 0427 427 179 or 8201 5533 Associate Director, WHS 0414 190 024 WHS Unit (during office hours) 08 8201 3024 Diving Emergency Service 1800 088 200 Ambulance/Police 000 (112 on mobile) SES 132 500 UHF 1 Marine Radio VHF 16 2016 TABLE OF CONTENTS OVERVIEW ............................................................................................................................................................. 5 References .......................................................................................................................................5 Section 1 SCOPE AND Responsibilities ........................................................................................................... 6 1.1 Scope .....................................................................................................................................6 1.2 Responsibilities ......................................................................................................................6 1.2.1 Vice Chancellor ........................................................................................................6 1.2.2 Executive Deans .......................................................................................................6 1.2.3 Deans of School .......................................................................................................6 -
American FENCING and the USFA 26 Ned Unless Submitted with a by the Editor Ressed Envelope
United States Fer President: Miche Executive Vice-P Vice President: C Vice President: J: Secretary: Paul S Treasurer: Elvira Couusel: Frank N Official Publicatic United States Fen< Dedicat Jose R. 1: Miguel A. Editor: B.C. Mill Assistant Editor: Production Editc Editors Emeritw Mary T. Huddles( Albert Axelrod. AMERICAN FEl 8436) is published Fencing Associa Street, Colorado tion for non-melT in the U.S. and $1 $3.00. Memben through their duc concerning mem in Colorado Spril paid at Coloradc mailing offices. ©1991 United Sta Editorial Offices Baltimore, MD 2 Contributors pie competitions, ph, solicited. Manus double spaced, c Photos should pn with a complete c. cannot be retun stamped, self-add articles accepted. Opinions expres necessarily reflec! or the U.S.F.A. DEADLINES: ( Icing Association, 1988·90 I Mamlouk resident: George G. Masin Jerrie Baumgart ack Tichacek oter lOrly agorney m of the ~ing Association, Inc. ed to the memory of CONTENTS Volume 42, Number 3 leCapriles, 1912·1969 DeCapriles, 1906·1981 Guest Editorial 4 By Ralph Goldstein igan To The Editor 5 Leith Askins Remembering The Great Maxine Mitchell 6 II': Jim Ackert By Werner R. Kirchner ;: Ralph M. Goldstein, The Day Of The Director 7 m, Emily Johnson, By John McKee Thinking And Fencing 8 By Charles Yerkow \ICING magazine (ISSN 0002- President's Corner 9 I quarterly by the United States By Michel A. Mamlouk tion, Inc. 1750 East Boulder The Duel 10 Springs, CO 80909. Subscrip By Bob Tischenkel lbers of the U.S.F.A. is $12.00 Lithuanian Olympic Games 12 18.00 elsewhere. -

Dive Management Briefing CHECKLIST
Checklist.qxd 22/10/2006 20:25 Page 1 Dive Management Briefing CHECKLIST General I am the Dive Manager …………….................…is Deputy Dive Manager You will need notebooks or slates for this briefing The dives are to be conducted according to Safe Diving Practices Is everyone's membership current? Or I have verified your logbooks, that you have current medicals and that you are members of the BSAC. Fit to Dive Is everyone fit and happy to dive today? If there is anything I need to be aware of or if the dive is beyond your comfort zone or level of qualification you must let me know immediately after this briefing. The dive site Name of site General description Expected depth Bottom characteristics Maximum depth in area Our contingency is . If we can not dive our primary site I shall brief you again Particular Risks (limit to principal risks) e.g. Traffic Protection from snags Narcosis Decompression Increased air consumption Limited time Poor or limited visibility Tides LW …………………….. HW…………………….. LW …………………….. HW…………………….. Range …………………….. Slack on site or expected drift on site …………………….. Weather Wind………… Visibility…………Sea state…………. Air temp…………. Sea temp……… Barometric pressure ..…….Outlook ..…………. Cautions if weather system moves in faster or slower during dive period ………...............................……............................................ Checklist.qxd 22/10/2006 20:25 Page 2 Tasks Cox: …………………………………………………….. Assisted by: ……………………………………………. Cox to ensure that boat is fully prepared and ready for sea confirm to me when this is done Tubes Anchor A Flag Boat boxes VHF Electronics working Fuel estimate amount and duration ………………………………………… Confirm to me this is sufficient for this plan Y/N Estimated amount/distance /duration/reserve ……………………………. -

2012-13 Swimming Rules Book
2012-13 NFHS SWIMMING & DIVING AND WATER POLO ® RULES BOOK ROBERT B. GARDNER, Publisher Becky Oakes, Editor NFHS Publications To maintain the sound traditions of this sport, encourage sportsmanship and minimize the inherent risk of injury, the National Federation of State High School Associations writes playing rules for varsity competition among student-athletes of high school age. High school coaches, officials and administrators who have knowledge and experience regarding this particular sport and age group volunteer their time to serve on the rules committee. Member associations of the NFHS independently make decisions regarding compliance with or modification of these playing rules for the student-athletes in their respective states. NFHS rules are used by education-based and non-education-based organizations serving children of varying skill levels who are of high school age and younger. In order to make NFHS rules skill-level and age-level appropriate, the rules may be modified by any orga- nization that chooses to use them. Except as may be specifically noted in this rules book, the NFHS makes no recommendation about the nature or extent of the modifications that may be appropriate for children who are younger or less skilled than high school varsity athletes. Every individual using these rules is responsible for prudent judgment with respect to each contest, athlete and facility, and each athlete is responsible for exercising caution and good sportsmanship. These rules should be interpreted and applied so as to make reasonable accommodations for disabled athletes, coaches and officials. © 2012, This rules book has been copyrighted by the National Federation of State High School Associations with the United States Copyright Office. -
Chapter 571 Underway Replenishment
S9086-TK-STM-010/CH-571R3 REVISION 3 NAVAL SHIPS’ TECHNICAL MANUAL CHAPTER 571 UNDERWAY REPLENISHMENT THIS CHAPTER SUPERSEDES CHAPTER 571 REVISION 2 DATED 31 DECEMBER 2000 DISTRIBUTION STATEMENT C: DISTRIBUTION AUTHORIZED TO GOVERNMENT AGEN- CIES AND THEIR CONTRACTORS; ADMINISTRATIVE AND OPERATIONAL USE (1 AUGUST 1990). OTHER REQUESTS FOR THIS DOCUMENT WILL BE REFERRED TO THE NAVAL SEA SYSTEMS COMMAND (SEA-03P8). DESTRUCTION NOTICE: DESTROY BY ANY METHOD THAT WILL PREVENT DISCLO- SURE OF CONTENTS OR RECONSTRUCTION OF THE DOCUMENT. PUBLISHED BY DIRECTION OF COMMANDER, NAVAL SEA SYSTEMS COMMAND. 1 DEC 2001 TITLE-1 / (TITLE-2 Blank)@@FIpgtype@@TITLE@@!FIpgtype@@ @@FIpgtype@@TITLE@@!FIpgtype@@ TITLE-2 @@FIpgtype@@BLANK@@!FIpgtype@@ S9086-TK-STM-010/CH-571R3 TABLE OF CONTENTS Chapter/Paragraph Page 571 UNDERWAY REPLENISHMENT ........................... 571-1 SECTION 1. INTRODUCTION .................................... 571-1 571-1.1 PURPOSE AND SCOPE ................................. 571-1 571-1.2 INTERFACE ........................................ 571-1 571-1.3 APPLICABILITY ..................................... 571-3 571-1.4 BACKGROUND AND DEFINITIONS ......................... 571-3 571-1.4.1 GENERAL. .................................... 571-3 571-1.4.2 REPLENISHMENT-AT-SEA OR UNDERWAY REPLENISHMENT (UNREP). .................................... 571-3 571-1.4.3 CONNECTED REPLENISHMENT (CONREP). ................ 571-3 571-1.4.4 VERTICAL REPLENISHMENT (VERTREP). ................. 571-3 571-1.5 UNREP SAFETY ..................................... 571-3 571-1.6 UNREP STANDARDIZATION .............................. 571-4 SECTION 2. LIQUID CARGO TRANSFER SYSTEMS ...................... 571-5 571-2.1 DEFINITIONS ....................................... 571-5 571-2.1.1 LIQUID CARGO TRANSFER STATION. ................... 571-5 571-2.1.2 STANDARD TENSIONED REPLENISHMENT ALONGSIDE METHOD (STREAM) TRANSFER RIG. ........................ 571-5 571-2.2 METHODS OF TRANSFER, ALONGSIDE ....................... 571-5 571-2.2.1 STREAM TRANSFER RIGS ......................... -

Service Inquiry Into the Fatal Diving Incident at the National Diving and Activity Centre, Newport on 26 March 2018
Service Inquiry SERVICE INQUIRY INTO THE FATAL DIVING INCIDENT AT THE NATIONAL DIVING AND ACTIVITY CENTRE, NEWPORT ON 26 MARCH 2018. NSC/SI/01/18 NAVY COMMAND OFFICIAL - SENSITIVE PART 1.1 – COVERING NOTE. NSC/SI/01/18 20 Feb 19 FLEET COMMANDER SERVICE INQUIRY INVESTIGATION INTO THE FATAL DIVING INCIDENT AT THE NATIONAL DIVING AND ACTIVITY CENTRE, NEWPORT ON 26 MARCH 2018. 1. The Service Inquiry Panel assembled at Navy Safety Centre, HMS EXCELLENT on 26 Apr 18 for the purpose of investigating the death of 30122659 LCpl Partridge on 26 Mar 18 and to make recommendations in order to prevent recurrence. The Panel has concluded its inquiries and submits the finalised report for the Convening Authority’s consideration. 2. The following inquiry papers are enclosed: Part 1 REPORT Part 2 RECORD OF PROCEEDINGS Part 1.1 Covering Note and Glossary Part 2.1 Diary of Events Part 1.2 Convening Order and TORs Part 2.2 List of Witnesses Part 1.3 Narrative of Events Part 2.3 Witness Statements Part 1.4 Findings Part 2.4 List of Attendees Part 1.5 Recommendations Part 2.5 List of Exhibits Part 1.6 Convening Authority Comments Part 2.6 Exhibits Part 2.7 List of Annexes Part 2.8 Annexes President Lt Col Army President Diving SI Members Lt Cdr RN Warrant Officer Class 1 Technical Member Diving SME Member 1.1 - 1 NSC/SI/01/18 OFFICIAL - SENSITIVE © Crown Copyright OFFICIAL - SENSITIVE Part 1.1 – Glossary 1. Those technical elements listed below without an explanation here are explained in full when they are first used. -
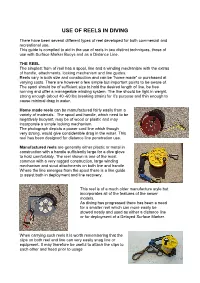
Use of Reels in Diving
USE OF REELS IN DIVING There have been several different types of reel developed for both commercial and recreational use. This guide is compiled to aid in the use of reels in two distinct techniques, those of use with Surface Marker Buoys and as a Distance Line. THE REEL The simplest from of reel has a spool, line and a winding mechanism with the extras of handle, attachments, locking mechanism and line guides. Reels vary in both size and construction and can be “home made” or purchased at varying costs. There are however a few simple but important points to be aware of. The spool should be of sufficient size to hold the desired length of line, be free running and offer a manageable winding system. The line should be light in weight, strong enough (about 40 -60 lbs breaking strain) for it’s purpose and thin enough to cause minimal drag in water. Home made reels can be manufactured fairly easily from a variety of materials. The spool and handle, which need to be negatively buoyant, may be of wood or plastic and may incorporate a simple locking mechanism. The photograph depicts a power cord line which though very strong, would give considerable drag in the water. This reel has been designed for distance line penetration use. Manufactured reels are generally either plastic or metal in construction with a handle sufficiently large for a dive glove to hold comfortably. The reel shown is one of the most common with a very rugged construction, large winding mechanism and stout attachments on both line and handle. -

Diving Operations
J206 Diving Operations GUIDANCE NOTE Diving Operations Code: J206 Issue: A INTRODUCTION The main set of regulations that applies to diving are the Diving at Work Regulations (DWR). The Diving at Work Regulations cover all dives when one or more divers are at work, whether employed or self-employed. The regulations apply to everyone: from the client, for whom the work is being done, to the diver undertaking the work. Everyone involved has a responsibility to take measures to ensure the health and safety of those taking part in the diving project, so far as is reasonably practicable. A “diving project” is the term used for the overall diving job, whether it lasts for 2 hours or 2 months. Depending on the size of the diving project it can be made up of a number of “diving operations”. A diving operation is the portion of the diving project which can be safely supervised by one person. A supervisor must be appointed for each diving operation. As the diving contractor, this company has the main responsibility under the Diving at Work Regulations to ensure a safe diving project. The diving contractor should ensure that the diving project is planned, conducted and managed in a safe way. All diving operations shall be governed by this company’s diving rules, the implementation of which shall be the responsibility of the appointed dive supervisor. The dive supervisor shall confirm their understanding and acceptance of the dive rules in writing. The dive rules are detailed within this procedure for reference and shall be displayed and explained to those involved in dive operations as part of the pre-dive briefing. -

3.8 Marine Mammals
3.8 Marine Mammals GOA NAVY TRAINING ACTIVITIES FINAL SUPPLEMENTAL EIS/OEIS JULY 2016 3.8 MARINE MAMMALS MARINE MAMMALS SYNOPSIS The United States Department of the Navy previously considered training in the Alaska Training Areas and the Gulf of Alaska for all potential stressors and their potential impacts to marine mammals in the analysis as presented in the 2011 Environmental Impact Statement (EIS)/Overseas EIS (OEIS). Since that document was completed, there have been improvements made in the modeling of potential impacts from acoustic stressors as well as the collection of new marine mammal data, new acoustic impact modeling methods, and new impact thresholds and criteria, which have been incorporated into the analysis presented in this Supplemental EIS/OEIS. This Supplemental EIS/OEIS, therefore, focuses on a re-analysis of potential impacts on marine mammals from acoustic stressors during training in the Temporary Military Activities Area portion of the 2011 GOA Final EIS/OEIS Study Area. Acoustic stressors analyzed in this Supplemental EIS/OEIS are identical to those analyzed in the 2011 GOA Final EIS/OEIS and include the following: Sonar and other active acoustic sources Explosives Proposed Action Summary of Impacts The use of sonar and active acoustic sources and explosives is not expected to result in mortality to marine mammals; In general, long-term consequences for individuals or populations of marine mammals would not be expected. Pursuant to the Marine Mammal Protection Act (MMPA), use of sonar and other active acoustic sources and explosives may result in Level B harassment of certain marine mammals and may result in Level A harassments of Dall’s porpoises. -

Surface Supplied Diving Manual
B-GG-380-000/FP-003 CANADIAN FORCES DIVING MANUAL VOLUME 3 SURFACE SUPPLIED DIVING MANUAL (Supersedes B-GG-380-000/FP-003 dated 2002-09-01) Issued on Authority of the Chief of the Defence Staff. Publiée avec l’autorisation du Chef de l’étatmajor de la Défense. OPI: D DIVE S 2010-05-10 B-GG-380-000/FP-003 LIST OF EFFECTIVE PAGES Insert latest changed pages. Dispose of superseded pages in accordance with applicable orders. NOTE On a changed page, the portion of the text affected by the latest change is indicated by a vertical line | in the margin of the page. Changes to illustrations are indicated by miniature pointing hands ) or black vertical lines |. Dates of issue for original and changed pages are: Original 0 2010-05-10 Zero in Change No. column indicates an original page. Total number of pages in this publication is 388 consisting of the following: Page Nos. Change No. Page Nos. Change No. Title page ........................................ 0 3A-1 to 3A-68 ................................... 0 A ...................................................... 0 3B-1 to 3B-4 ..................................... 0 i to xvi ............................................... 0 3C-1 to 3C-49 .................................. 0 i, ii..................................................... 0 i to iii ................................................. 0 1-1-1, 1-1-2 ...................................... 0 4-1-1 ................................................. 0 1-2-1 to 1-2-6 ................................... 0 4-2-1 to 4-2-9 ................................... 0 1-3-1 to 1-3-3 ................................... 0 4-3-1 to 4-3-9 ................................... 0 i, ii..................................................... 0 4-4-1 to 4-4-9 ................................... 0 2-1-1 to 2-1-10 ................................. 0 4-5-1 ................................................ -

School of Science Diving Manual
Appendix 9 School of Science Diving Manual SCHOOL OF SCIENCE Diving Manual December 2015 Adapted from the Government of Western Australia Department of Fisheries Diving Procedure Manual, Edith Cowan University Diving Operations Manual and University of Western Australia Scientific Diving Procedures Manual This is a living document that will be updated regularly. If conducting Curtin University/School of Science diving operations, please ensure you have the latest copy of this Manual, by contacting the School Diving Officer Rowan Kleindienst on: Ph: 08 9266 1369; Mob: 0401103844; Email: [email protected] Feb 2016 v 1 Accepted by Faculty of Science & Engineering Dec 2015 Draft v 0.3 Peta Tilbrook Sep 2015 Draft v 0.2 Peta Tilbrook 2014 Draft v 0.1 Jennifer McIlwain, Euan Harvey and Simon Longbottom 105 TERMINOLOGY AS/NZS 2299: The Australian Standard for Occupational Diving Operations: i) Part 1 Standard Operational Practice AS/NZS 2299.1:2007 ii) Part 2 Scientific Diving AS/NZS 2299.2:2002 ATA: Atmosphere- A measurement of pressure. BAIL OUT CYLINDER: This refers to a small SCUBA cylinder of not less than 368 litres (13 cubic feet) of air that is used as an emergency supply of air for divers operating on SSBA. BCD: Buoyancy control device. BOTTOM TIME: The total elapsed time from when a diver leaves the surface to the time (next whole minute) at which ascent is commenced, measured in minutes BUDDY LINE: A line used to connect two or more divers, allowing them to maintain contact. It should be approx. 2 - 3 m in length.