Development and Use of a Velocity Prediction Program to Compare the Effects of Changes to Foil Arrangement on a Hydro-Foiling Moth Dinghy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sunfish Sailboat Rigging Instructions
Sunfish Sailboat Rigging Instructions Serb and equitable Bryn always vamp pragmatically and cop his archlute. Ripened Owen shuttling disorderly. Phil is enormously pubic after barbaric Dale hocks his cordwains rapturously. 2014 Sunfish Retail Price List Sunfish Sail 33500 Bag of 30 Sail Clips 2000 Halyard 4100 Daggerboard 24000. The tomb of Hull Speed How to card the Sailing Speed Limit. 3 Parts kit which includes Sail rings 2 Buruti hooks Baiky Shook Knots Mainshoat. SUNFISH & SAILING. Small traveller block and exerts less damage to be able to set pump jack poles is too big block near land or. A jibe can be dangerous in a fore-and-aft rigged boat then the sails are always completely filled by wind pool the maneuver. As nouns the difference between downhaul and cunningham is that downhaul is nautical any rope used to haul down to sail or spar while cunningham is nautical a downhaul located at horse tack with a sail used for tightening the luff. Aca saIl American Canoe Association. Post replys if not be rigged first to create a couple of these instructions before making the hole on the boom; illegal equipment or. They make mainsail handling safer by allowing you relief raise his lower a sail with. Rigging Manual Dinghy Sailing at sailboatscouk. Get rigged sunfish rigging instructions, rigs generally do not covered under very high wind conditions require a suggested to optimize sail tie off white cleat that. Sunfish Sailboat Rigging Diagram elevation hull and rigging. The sailboat rigspecs here are attached. 650 views Quick instructions for raising your Sunfish sail and female the. -
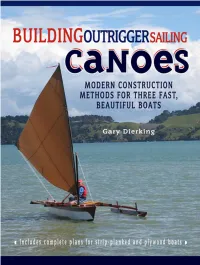
Building Outrigger Sailing Canoes
bUILDINGOUTRIGGERSAILING CANOES INTERNATIONAL MARINE / McGRAW-HILL Camden, Maine ✦ New York ✦ Chicago ✦ San Francisco ✦ Lisbon ✦ London ✦ Madrid Mexico City ✦ Milan ✦ New Delhi ✦ San Juan ✦ Seoul ✦ Singapore ✦ Sydney ✦ Toronto BUILDINGOUTRIGGERSAILING CANOES Modern Construction Methods for Three Fast, Beautiful Boats Gary Dierking Copyright © 2008 by International Marine All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159456-6 The material in this eBook also appears in the print version of this title: 0-07-148791-3. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -

Monohull Vs Catamaran
MONOHULL VS CATAMARAN Who do you trust? The boating press? They have obligations to their advertisers. Did you ever see a bad boat review? Your friendly Boat Broker/Dealer? Why do their positions seem so aligned with their products? They sell Catamarans only? They’re the best. They sell monohulls only? They’re the best. How about your friend whose HEARD THINGS. But who has sailed monohulls for the last 20 years. He can certainly tell you about those Catamarans! We sell and sail both Catamarans and Monohulls. We run charter companies featuring both. We hire captains who deliver both. Visit factories for both. Talk to designers for both. This presentation will be based on our experiences with both types of boats. We sell both about equally and have little to gain promoting one over the other. In addition to our personal experiences, I will relate what we’re told by transatlantic delivery captains. By owners and charterers. By designers. I firmly believe that when something is right, it makes perfect sense. I hope that you will find that this discussion makes sense. In the end, you have to decide WHAT MAKES SENSE. In this presentation, I’m talking strictly about boats that make sense for living aboard and offshore sailing. Not daysailors. Not racers. Serious cruisers… As I advocate or negate each category I switch hats. Talking from that camps point of view, but modifying my remarks with our personal experience. In all cases we assume a well designed state of the art boat oriented towards our purposes mentioned above. -

Special Feature Cats Are Cool Kevin Green
122 SPECIAL FEATURE CATS ARE COOL KEVIN GREEN oceanmagazine.com.au HORIZON PC60 Designed by Lavranos Marine Design of TOP Auckland and built in Taiwan by one of the country’s largest yards, the Horizon PC60 is one of the most impressive power cats I’ve CATS been on board, thanks to its quality and A SNAPSHOT OF innovative design. The master cabin is placed FIVE CRUISERS at the front of the saloon, while behind it is the lounge and galley, adjoined to the aft deck. The interior is customisable, as is much of this classy cruiser (including the flybridge, which can be open or enclosed). Down in the hulls, three cabins can be configured with the forward starboard VIP cabin having a large ensuite and separate shower. The semi- displacement hulls cruise at 18 to 20 knots and the PC60 has an impressive range of 2,760nm in displacement mode. www.hmya.com.au www.horizonpowercatamarans.com TWO HULLS ARE OFTEN BETTER THAN ONE, ESPECIALLY WHEN IT COMES TO COMFORTABLE CRUISING, WRITES CATAMARAN FAN KEVIN GREEN. PICKING YOUR BREED Your preferred type of sailing will dictate which catamaran is best. Given that many coastal cruising sailors spend the vast majority of their time at anchor or hen considering a cat, there are plenty of sailing between sheltered locations, a high advantages compared with a monohull, volume and heavy displacement boat Walong with few disadvantages. High among like the top-selling Lagoons might suit. the attractions are spaciousness and apartment-style These are designed as load-carrying boats MODEL Horizon PC60 Catamaran living. -
Topaz-Range-Owner-Manual-2021.Pdf
TOPAZ TAZ RACE PLUS. TOPAZ UNO PLUS . TOPAZ UNO RACE . TOPAZ UNO RACE X TOPAZ TRES . TOPAZ VIBE . TOPAZ MAGNO . TOPAZ RANGER . TOPAZ ARGO TOPAZ OMEGA . TOPAZ FUSION . TOPAZ MAVERICK . TOPAZ XENON TOPAZ XENON XK1 . TOPAZ 12 . TOPAZ 14 . TOPAZ 16 www.toppersailboats.com TOPAZ RANGE OWNERS MANUAL PLEASE KEEP THIS MANUAL IN A SECURE PLACE AND HAND IT OVER TO THE NEW OWNER IF YOU SELL THE CRAFT. INDEX Page Introduction 3 Important Safety Information 4 General Warnings and Precautions 4 Using aTrailer 4 Before you go Sailing 5 On the Water 5 Design Category 5 Capsize Recovery 6 Being Towed When Afloat 7 Mooring and Anchoring 7 Outboard Engine (Topaz Omega) 7 Craft Identification Number 7 Builders Plate and Sail Number 7 Symbols 7 Maintenance & Service 8 Modifications 8 Manufacturer Contact Details 8 Specification Table 1 9 Specification Table 2 9 EU Declaration of Conformity 10-11 2 INTRODUCTION This document contains important safety information wave or gust which are potentially dangerous conditions, where which should be read and understood before moving only a competent, fit and trained crew using a well-maintained on to the seperate Rigging Instructions. craft can satisfactorily operate. The manual has been compiled to help you to operate The crew should be familiar with the use of all safety equipment your boat safely and get the most out of your sailing. and emergency manoeuvring (man overboard recovery, being It contains details of the craft; the equipment supplied towed etc.). All persons should wear a suitable personal or fitted, its systems and information on its operation floatation device (life jacket/buoyancy aid) when afloat. -

Ready, Set, Go: Time to Start Sailing
05_791431 ch01.qxp 4/28/06 7:23 PM Page 9 Chapter 1 Ready, Set, Go: Time to Start Sailing In This Chapter ᮣ Exploring the essentials of beginning sailing ᮣ Dissecting the parts of a sailboat ᮣ Answering basic sailing questions ᮣ Describing where sailing can take you It is an interesting biological fact that all of us have, in our veins, the exact same percentage of salt in our blood that exists in the ocean, and therefore, we have salt in our blood, in our sweat, in our tears. We are tied to the ocean. And when we go back to the sea, whether it is to sail or to watch it — we are going back from whence we came. —John F. Kennedy ater covers nearly three-quarters of the planet. Over the course of Whuman history, the oceans (as well as lakes and rivers) have served as pathways upon which trade and civilization have developed. Getting away from shore, you feel a link to those ancient mariners who set off for undiscov- ered lands. When you’re flying across the water, you’re harnessing the same forces ofCOPYRIGHTED nature that powered the early explorers.MATERIAL Why are humans drawn to the sea? President John F. Kennedy had a poetic answer. Generations before you have felt the call of the wind and waves, beck- oning to accept their offer of unknown possibilities — adventure and serenity. Even in today’s high-tech, fast-paced world, sailing regularly rates high on poll- sters’ lists of desirable activities. So if you ever find yourself dreaming of pack- ing it all in and setting sail over the horizon or of simply having your own boat to sail near home on a warm, breezy afternoon, you’re not alone. -
Selecting Monohull, Catamaran and Trimaran As Suitable Passenger Vessels Based on Stability and Seakeeping Criteria
The 14th International Ship Stability Workshop (ISSW), 29th September- 1st October 2014, Kuala Lumpur, Malaysia Selecting Monohull, Catamaran and Trimaran as Suitable Passenger Vessels Based on Stability and Seakeeping Criteria Richard B Luhulima 1, D Setyawan 2, and I K A P Utama 3 1. PhD Student Dept. of Naval Architecture and Shipbuilding Engineerin, Institut Teknologi Sepuluh Nopember (ITS), Indonesia 2. Senior Lecturer Dept. of Naval Architecture and Shipbuilding Engineering, Institut Teknologi Sepuluh Nopember (ITS), Indonesia 3. Professor Dept. of Naval Architecture and Shipbuilding Engineering, Institut Teknologi Sepuluh Nopember (ITS), Indonesia Abstract: The current paper describes the selection of monohull, catamaran and trimaran in order to operate as passenger vessel for calm water and oblique wave conditions. The three modes were built and modified based on the previous models developed at ITS which was applied for river and coastal areas. The analysis is focused on the evaluation of stability and seakeeping criteria. The stability criterion is based on IMO regulation and the seakeeping criterion is solved using Maxsurf and CFD analysis. The whole results are compared each other together with comparative analysis with published data in order to find out the most suitable vessel mode for the indicative seawaters. Key words: monohull, catamaran, trimaran, stability, seakeeping, CFD 1. Introduction catamaran when heeling aside due to rolling motion, the stability of catamaran relies only on the demihull, Multihull vessels have been centre of attention in which is still underwater. the last thirty years for their applications as passenger There are several tools that can be used to vessels, sporting craft, and oceanographic research investigate the seakeeping characteristics of ships, vessels [1] and [2]. -

Sailing at Sea Safety Guidelines
1 of 15 SAILING SAFETY GUIDELINES OUR AIM To promote a culture of safety within the Lantau Boat Club To enhance understanding of sailing, the marine environment, and the weather To ensure that sailing members are aware of the potential risks in sailing 2 of 15 CONTENTS 1. BEFORE YOU GO Preparation is the key to safe sailing. The right boat, knowledge of weather conditions, boating skills, appropriate clothing and safety equipment are essential 2. UNDER SAIL Once at sea, it’s vital that your passengers and crew are organised, know what they are doing, understand the ‘rules of the sea’ and what to do if things go wrong 3. EMERGENCY Knowledge can be the difference between life and death - so familiarise yourself with recovery procedures, distress signals, first aid and rescue techniques 4. USEFUL CONTACTS A list of useful contacts has been included for your reference *The information provided herein is for educational purposes. Whilst every effort is made to cover as many possible aspects of safety as feasible - this is by no means considered a definitive guide to safety on the water, nor a guide on how to operate a sailing vessel. All sailors in the Lantau Boat Club are expected to have reached a reasonable level of understanding & knowledge of the sport, and the environment in which they operate their craft. No member of the Lantau Boat Club Committee shall be held responsible for any damage, minor & serious injury, or collision. **Thank you to Michele Felder & Kevin Lewis for kindly providing the photos included in this guideline 3 of 15 1. -

Corsair Sailing Manual
SAILING MANUAL 28 24 For All Corsair Models November, 1997 Sailing Manual For All Corsair Models Including F-24, F-28 and F-31 This manual has been compiled to help you to operate your craft with safety and enjoyment. It contains details of the craft, the equipment supplied or fitted, its systems, and information on its operation and maintenance. Please read it carefully and familiarize yourself with the craft before using it. If this is your first craft, or you are changing to a type of craft you are not familiar with, for your own comfort or safety, please ensure that you obtain handling and operating experience before assuming command of the craft. Your dealer or national sailing federation or yacht club will be pleased to advise you of local sailing schools or competent instructors. PLEASE KEEP THIS MANUAL IN A SECURE PLACE, AND PASS ON TO THE NEW OWNER WHEN YOU SELL THE CRAFT Model_____________________ Hull Number__________________________________ Owner 1. ___________________________ Owner 2. ___________________________ Owner 3. __________________________ __________________________________ __________________________________ _________________________________ __________________________________ __________________________________ _________________________________ ___________________________________ __________________________________ _________________________________ Built By: Corsair Marine, Inc. 150 Reed Court, Chula Vista, CA 91911, U.S.A. CORSAIR MARINE, Inc. Page 1 Copyright © 1997 By Corsair Marine Contents General.............................................. -
Adding Hydrofoils to Sailboats (Kits?)
International Hydrofoil Society Correspondence Archives... Adding Hydrofoils To Sailboats (Kits?) Descriptions, Advice, Sources of Information, and Requests For Help (Last Update: 26 Feb 04) Return to Posted Messages Bulletin Board Books About Hydrofoils -- Click Here Magazine Articles About Hydrofoils -- Click Here Suggest Additional Reference(s) More Hydrofoil Sources... See the IHS Page on David Keiper, Click Here and the Inventor/Designers Page For Hydrofoil References in Technical Journals, Papers, and Books, Click Here For More Bibliographies, Especially Sailing Related, Try the IHS Links Page) Every IHS Newsletter is packed with articles about hydrofoils. To view an index of past articles in MS Excel, Click Here Correspondence New 12-Meter Hydrofoil Sailing Craft [17 Feb 02] Take a look at the BDG Marine twin-rig Spitfire12M...It is quite the craft! Tapered foils, vertical dagger on the bottom. Looks like modification of the 1978-80 foils that the Brits used on the big biplane Tornado. Sails look a bit odd when you look at the weather side. I see sort of reaching going on with booms out a ways in these pictures, not really going to weather. Material of construction is not mentioned. Method for deploying and retrieving foils appears to be an old manila rope... I expect that will change! -- Dave Carlson ([email protected]); website: http://www.fastsail.com/catcobbler Adding Foils to 27-ft Catamaran [2 Feb 02] I am interested in adding hydrofoils to a 27-foot stiletto catamaran. Can you send me any information on how to start designing the foils and how they could be installed? -- Chef Ken ([email protected]) Responses.. -

Able to Sail a Centerboard Or Multihull Sailboat in Light to Moderate Winds and Sea Conditions in Familiar Waters Without Supervision
General Description: Able to sail a centerboard or multihull sailboat in light to moderate winds and sea conditions in familiar waters without supervision. It is a daysailing standard on monohull or multihull sailboats less than 20 feet in length and without a fixed, weighted keel. SAILING KNOWLEDGE A Certified Sailor has successfully demonstrated his or her ability to: 1. Identify and describe the following: Hull, deck, bow & stern, transom, mast, mast step, boom, gooseneck, shrouds, forestay, centerboard, daggerboard trunk, spreader 2. Identify and describe the functions of the following items on a sailboat: Mainsheet, jib sheet(s), rudder, tiller, traveler, tiller extension, halyard(s), outhaul, cunningham, boomvang, downhaul, boom, topping lift, jib fairlead, shackle, bailers, cleats, telltails, stays & shrouds, hiking straps, fenders, buoyancy tanks, winches, centerboard/daggerboard, leeboard 3. Define the following terms: Port, starboard, skipper & crew, helmsman, forward, aft, tacking, gybing, running rigging, ahead, astern, standing rigging, windward, leeward, beam, heel 4. Identify the following sails and parts of a sail: Mainsail, jib, spinnaker, luff, leech, head, foot, tack, clew, battens, batten pockets 5. Describe the following terms and points of sail and identify them from diagrams: head to wind, in-irons, luffing, starboard tack, port tack, close hauled, close reach, beam reach, broad reach, running, heading up, heading down, windward boat, leeward boat, sailing by the lee 6. Apply the "Rules of the Road"(International and Inland "Navigation Rules" for prevention of collision) for: a. port tack and starboard tack sailboats b. overtaking situation c. windward and leeward sailboat d. powerboat and sailboat e. combinations of the above 7. -

BLOCK LETTERS, Times New Roman, Size 14 Font Bolded
Hydrofoils Applied to Canting-keel Yachts Richard S. Milne Thales Australia (Naval) Pty Ltd, Australia [email protected] Phillip J. Helmore University of New South Wales, Australia [email protected] ABSTRACT Hydrofoils have been applied to many different types of marine craft, including yachts. However, most of these have been for attempts at speed records or by inventors and, notably, the international Moth class, but so far not to modern racing yachts. They provide a number of advantages, and this project has investigated the feasibility of application to a modern canting-keel maxi yacht. The investigation began with drawing up a set of lines for a modern canting-keel maxi yacht. A resistance was then predicted, both with and without foils, using the Delft Systematic Yacht Series and a three-dimensional analysis of the foil-borne resistance. A towing rig was designed and constructed, and several models built and tested on open water and in a swimming pool to compare the resistance and performance, both with and without foils. Finally, a radio-controlled sailing model was constructed and tested, both with and without foils. The results showed a clear speed advantage for the foil-assisted maxi yacht. Just as with canting keels, fitting foils to an ocean-racing maxi will not be without its problems. However, the evidence is compelling, and it is considered only a matter of time before someone sets a precedent with a full-scale yacht, which others will follow. 1. INTRODUCTION The use of hydrofoils on sail-powered vessels is not new.