Transcription Factor Footprinting Using Chromatin Accessibility Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Down-Regulation of Stem Cell Genes, Including Those in a 200-Kb Gene Cluster at 12P13.31, Is Associated with in Vivo Differentiation of Human Male Germ Cell Tumors
Research Article Down-Regulation of Stem Cell Genes, Including Those in a 200-kb Gene Cluster at 12p13.31, Is Associated with In vivo Differentiation of Human Male Germ Cell Tumors James E. Korkola,1 Jane Houldsworth,1,2 Rajendrakumar S.V. Chadalavada,1 Adam B. Olshen,3 Debbie Dobrzynski,2 Victor E. Reuter,4 George J. Bosl,2 and R.S.K. Chaganti1,2 1Cell Biology Program and Departments of 2Medicine, 3Epidemiology and Biostatistics, and 4Pathology, Memorial Sloan-Kettering Cancer Center, New York, New York Abstract on the degree and type of differentiation (i.e., seminomas, which Adult male germ cell tumors (GCTs) comprise distinct groups: resemble undifferentiated primitive germ cells, and nonseminomas, seminomas and nonseminomas, which include pluripotent which show varying degrees of embryonic and extraembryonic embryonal carcinomas as well as other histologic subtypes patterns of differentiation; refs. 2, 3). Nonseminomatous GCTs are exhibiting various stages of differentiation. Almost all GCTs further subdivided into embryonal carcinomas, which show early show 12p gain, but the target genes have not been clearly zygotic or embryonal-like differentiation, yolk sac tumors and defined. To identify 12p target genes, we examined Affymetrix choriocarcinomas, which exhibit extraembryonal forms of differ- (Santa Clara, CA) U133A+B microarray (f83% coverage of 12p entiation, and teratomas, which show somatic differentiation along genes) expression profiles of 17 seminomas, 84 nonseminoma multiple lineages (3). Both seminomas and embryonal carcinoma GCTs, and 5 normal testis samples. Seventy-three genes on 12p are known to express stem cell markers, such as POU5F1 (4) and were significantly overexpressed, including GLUT3 and REA NANOG (5). -
Detection of Interacting Transcription Factors in Human Tissues Using
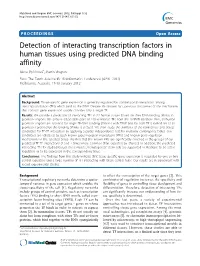
Myšičková and Vingron BMC Genomics 2012, 13(Suppl 1):S2 http://www.biomedcentral.com/1471-2164/13/S1/S2 PROCEEDINGS Open Access Detection of interacting transcription factors in human tissues using predicted DNA binding affinity Alena Myšičková*, Martin Vingron From The Tenth Asia Pacific Bioinformatics Conference (APBC 2012) Melbourne, Australia. 17-19 January 2012 Abstract Background: Tissue-specific gene expression is generally regulated by combinatorial interactions among transcription factors (TFs) which bind to the DNA. Despite this known fact, previous discoveries of the mechanism that controls gene expression usually consider only a single TF. Results: We provide a prediction of interacting TFs in 22 human tissues based on their DNA-binding affinity in promoter regions. We analyze all possible pairs of 130 vertebrate TFs from the JASPAR database. First, all human promoter regions are scanned for single TF-DNA binding affinities with TRAP and for each TF a ranked list of all promoters ordered by the binding affinity is created. We then study the similarity of the ranked lists and detect candidates for TF-TF interaction by applying a partial independence test for multiway contingency tables. Our candidates are validated by both known protein-protein interactions (PPIs) and known gene regulation mechanisms in the selected tissue. We find that the known PPIs are significantly enriched in the groups of our predicted TF-TF interactions (2 and 7 times more common than expected by chance). In addition, the predicted interacting TFs for studied tissues (liver, muscle, hematopoietic stem cell) are supported in literature to be active regulators or to be expressed in the corresponding tissue. -

Mutations and Altered Expression of SERPINF1 in Patients with Familial Otosclerosis Joanna L
Human Molecular Genetics, 2016, Vol. 25, No. 12 2393–2403 doi: 10.1093/hmg/ddw106 Advance Access Publication Date: 7 April 2016 Original Article ORIGINAL ARTICLE Mutations and altered expression of SERPINF1 in patients with familial otosclerosis Joanna L. Ziff1, Michael Crompton1, Harry R.F. Powell2, Jeremy A. Lavy2, Christopher P. Aldren3, Karen P. Steel4,†, Shakeel R. Saeed1,2 and Sally J. Dawson1,* 1UCL Ear Institute, University College London, London WC1X 8EE, UK, 2Royal National Throat Nose and Ear Hospital, London WC1X 8EE, UK, 3Department of ENT Surgery, The Princess Margaret Hospital, Windsor SL4 3SJ, UK and 4Wellcome Trust Sanger Institute, Hinxton CB10 1SA, UK *To whom correspondence should be addressed. Tel: þ44 2076798935; Email: [email protected] Abstract Otosclerosis is a relatively common heterogenous condition, characterized by abnormal bone remodelling in the otic capsule leading to fixation of the stapedial footplate and an associated conductive hearing loss. Although familial linkage and candidate gene association studies have been performed in recent years, little progress has been made in identifying disease- causing genes. Here, we used whole-exome sequencing in four families exhibiting dominantly inherited otosclerosis to identify 23 candidate variants (reduced to 9 after segregation analysis) for further investigation in a secondary cohort of 84 familial cases. Multiple mutations were found in the SERPINF1 (Serpin Peptidase Inhibitor, Clade F) gene which encodes PEDF (pigment epithelium-derived factor), a potent inhibitor of angiogenesis and known regulator of bone density. Six rare heterozygous SERPINF1 variants were found in seven patients in our familial otosclerosis cohort; three are missense mutations predicted to be deleterious to protein function. -

Machine-Learning and Chemicogenomics Approach Defi Nes and Predicts Cross-Talk of Hippo and MAPK Pathways
Published OnlineFirst November 18, 2020; DOI: 10.1158/2159-8290.CD-20-0706 RESEARCH ARTICLE Machine -Learning and Chemicogenomics Approach Defi nes and Predicts Cross-Talk of Hippo and MAPK Pathways Trang H. Pham 1 , Thijs J. Hagenbeek 1 , Ho-June Lee 1 , Jason Li 2 , Christopher M. Rose 3 , Eva Lin 1 , Mamie Yu 1 , Scott E. Martin1 , Robert Piskol 2 , Jennifer A. Lacap 4 , Deepak Sampath 4 , Victoria C. Pham 3 , Zora Modrusan 5 , Jennie R. Lill3 , Christiaan Klijn 2 , Shiva Malek 1 , Matthew T. Chang 2 , and Anwesha Dey 1 ABSTRACT Hippo pathway dysregulation occurs in multiple cancers through genetic and non- genetic alterations, resulting in translocation of YAP to the nucleus and activation of the TEAD family of transcription factors. Unlike other oncogenic pathways such as RAS, defi ning tumors that are Hippo pathway–dependent is far more complex due to the lack of hotspot genetic alterations. Here, we developed a machine-learning framework to identify a robust, cancer type–agnostic gene expression signature to quantitate Hippo pathway activity and cross-talk as well as predict YAP/TEAD dependency across cancers. Further, through chemical genetic interaction screens and multiomics analyses, we discover a direct interaction between MAPK signaling and TEAD stability such that knockdown of YAP combined with MEK inhibition results in robust inhibition of tumor cell growth in Hippo dysregulated tumors. This multifaceted approach underscores how computational models combined with experimental studies can inform precision medicine approaches including predictive diagnostics and combination strategies. SIGNIFICANCE: An integrated chemicogenomics strategy was developed to identify a lineage- independent signature for the Hippo pathway in cancers. -

The Title of the Dissertation
UNIVERSITY OF CALIFORNIA SAN DIEGO Novel network-based integrated analyses of multi-omics data reveal new insights into CD8+ T cell differentiation and mouse embryogenesis A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Bioinformatics and Systems Biology by Kai Zhang Committee in charge: Professor Wei Wang, Chair Professor Pavel Arkadjevich Pevzner, Co-Chair Professor Vineet Bafna Professor Cornelis Murre Professor Bing Ren 2018 Copyright Kai Zhang, 2018 All rights reserved. The dissertation of Kai Zhang is approved, and it is accept- able in quality and form for publication on microfilm and electronically: Co-Chair Chair University of California San Diego 2018 iii EPIGRAPH The only true wisdom is in knowing you know nothing. —Socrates iv TABLE OF CONTENTS Signature Page ....................................... iii Epigraph ........................................... iv Table of Contents ...................................... v List of Figures ........................................ viii List of Tables ........................................ ix Acknowledgements ..................................... x Vita ............................................. xi Abstract of the Dissertation ................................. xii Chapter 1 General introduction ............................ 1 1.1 The applications of graph theory in bioinformatics ......... 1 1.2 Leveraging graphs to conduct integrated analyses .......... 4 1.3 References .............................. 6 Chapter 2 Systematic -
2017.08.28 Anne Barry-Reidy Thesis Final.Pdf
REGULATION OF BOVINE β-DEFENSIN EXPRESSION THIS THESIS IS SUBMITTED TO THE UNIVERSITY OF DUBLIN FOR THE DEGREE OF DOCTOR OF PHILOSOPHY 2017 ANNE BARRY-REIDY SCHOOL OF BIOCHEMISTRY & IMMUNOLOGY TRINITY COLLEGE DUBLIN SUPERVISORS: PROF. CLIONA O’FARRELLY & DR. KIERAN MEADE TABLE OF CONTENTS DECLARATION ................................................................................................................................. vii ACKNOWLEDGEMENTS ................................................................................................................... viii ABBREVIATIONS ................................................................................................................................ix LIST OF FIGURES............................................................................................................................. xiii LIST OF TABLES .............................................................................................................................. xvii ABSTRACT ........................................................................................................................................xix Chapter 1 Introduction ........................................................................................................ 1 1.1 Antimicrobial/Host-defence peptides ..................................................................... 1 1.2 Defensins................................................................................................................. 1 1.3 β-defensins ............................................................................................................. -

A Candidate Molecular Signature Associated with Tamoxifen Failure in Primary Breast Cancer
Available online http://breast-cancer-research.com/content/10/5/R88 ResearchVol 10 No 5 article Open Access A candidate molecular signature associated with tamoxifen failure in primary breast cancer Julie A Vendrell1,2,3,4,5,6, Katherine E Robertson7*, Patrice Ravel8*, Susan E Bray5, Agathe Bajard9, Colin A Purdie5, Catherine Nguyen10, Sirwan M Hadad5, Ivan Bieche11, Sylvie Chabaud9, Thomas Bachelot12, Alastair M Thompson5 and Pascale A Cohen1,2,3,4,6 1Université de Lyon, 69008 Lyon, France 2Université de Lyon, Lyon 1, ISPB, Faculté de Pharmacie de Lyon, 69008 Lyon, France 3INSERM, U590, 69008 Lyon, France 4Centre Léon Bérard, FNCLCC, 69373 Lyon, France 5Department of Surgery and Molecular Oncology, Ninewells Hospital and Medical School, University of Dundee, Dundee DD1 9SY, UK 6CNRS UMR 5160, Centre de Pharmacologie et Biotechnologie pour la Santé, Faculté de Pharmacie, 34090 Montpellier, France 7Division of Pathology and Neuroscience, Ninewells Hospital and Medical School, University of Dundee, Dundee DD1 9SY, UK 8Centre de Biochimie Structurale, CNRS, INSERM, Université Montpellier I, 34090 Montpellier, France 9Centre Léon Bérard, FNCLCC, Unité de Biostatistique et d'Evaluation des Thérapeutiques, 69373 Lyon, France 10INSERM ERM206, Laboratoire TAGC, Université d'Aix-Marseille II, 13288 Marseille Cedex 9, France 11INSERM U735, Centre René Huguenin, FNCLCC, 92210 St-Cloud, France 12Centre Léon Bérard, FNCLCC, Département de Médecine, 69373 Lyon, France * Contributed equally Corresponding author: Pascale A Cohen, [email protected] Received: 28 Feb 2008 Revisions requested: 7 Apr 2008 Revisions received: 13 Oct 2008 Accepted: 17 Oct 2008 Published: 17 Oct 2008 Breast Cancer Research 2008, 10:R88 (doi:10.1186/bcr2158) This article is online at: http://breast-cancer-research.com/content/10/5/R88 © 2008 Vendrell et al.; licensee BioMed Central Ltd. -

Genetic Variability in the Italian Heavy Draught Horse from Pedigree Data and Genomic Information
Supplementary material for manuscript: Genetic variability in the Italian Heavy Draught Horse from pedigree data and genomic information. Enrico Mancin†, Michela Ablondi†, Roberto Mantovani*, Giuseppe Pigozzi, Alberto Sabbioni and Cristina Sartori ** Correspondence: [email protected] † These two Authors equally contributed to the work Supplementary Figure S1. Mares and foal of Italian Heavy Draught Horse (IHDH; courtesy of Cinzia Stoppa) Supplementary Figure S2. Number of Equivalent Generations (EqGen; above) and pedigree completeness (PC; below) over years in Italian Heavy Draught Horse population. Supplementary Table S1. Descriptive statistics of homozygosity (observed: Ho_obs; expected: Ho_exp; total: Ho_tot) in 267 genotyped individuals of Italian Heavy Draught Horse based on the number of homozygous genotypes. Parameter Mean SD Min Max Ho_obs 35,630.3 500.7 34,291 38,013 Ho_exp 35,707.8 64.0 35,010 35,740 Ho_tot 50,674.5 93.8 49,638 50,714 1 Definitions of the methods for inbreeding are in the text. Supplementary Figure S3. Values of BIC obtained by analyzing values of K from 1 to 10, corresponding on the same amount of clusters defining the proportion of ancestry in the 267 genotyped individuals. Supplementary Table S2. Estimation of genomic effective population size (Ne) traced back to 18 generations ago (Gen. ago). The linkage disequilibrium estimation, adjusted for sampling bias was also included (LD_r2), as well as the relative standard deviation (SD(LD_r2)). Gen. ago Ne LD_r2 SD(LD_r2) 1 100 0.009 0.014 2 108 0.011 0.018 3 118 0.015 0.024 4 126 0.017 0.028 5 134 0.019 0.031 6 143 0.021 0.034 7 156 0.023 0.038 9 173 0.026 0.041 11 189 0.029 0.046 14 213 0.032 0.052 18 241 0.036 0.058 Supplementary Table S3. -

A Computational Approach for Defining a Signature of Β-Cell Golgi Stress in Diabetes Mellitus
Page 1 of 781 Diabetes A Computational Approach for Defining a Signature of β-Cell Golgi Stress in Diabetes Mellitus Robert N. Bone1,6,7, Olufunmilola Oyebamiji2, Sayali Talware2, Sharmila Selvaraj2, Preethi Krishnan3,6, Farooq Syed1,6,7, Huanmei Wu2, Carmella Evans-Molina 1,3,4,5,6,7,8* Departments of 1Pediatrics, 3Medicine, 4Anatomy, Cell Biology & Physiology, 5Biochemistry & Molecular Biology, the 6Center for Diabetes & Metabolic Diseases, and the 7Herman B. Wells Center for Pediatric Research, Indiana University School of Medicine, Indianapolis, IN 46202; 2Department of BioHealth Informatics, Indiana University-Purdue University Indianapolis, Indianapolis, IN, 46202; 8Roudebush VA Medical Center, Indianapolis, IN 46202. *Corresponding Author(s): Carmella Evans-Molina, MD, PhD ([email protected]) Indiana University School of Medicine, 635 Barnhill Drive, MS 2031A, Indianapolis, IN 46202, Telephone: (317) 274-4145, Fax (317) 274-4107 Running Title: Golgi Stress Response in Diabetes Word Count: 4358 Number of Figures: 6 Keywords: Golgi apparatus stress, Islets, β cell, Type 1 diabetes, Type 2 diabetes 1 Diabetes Publish Ahead of Print, published online August 20, 2020 Diabetes Page 2 of 781 ABSTRACT The Golgi apparatus (GA) is an important site of insulin processing and granule maturation, but whether GA organelle dysfunction and GA stress are present in the diabetic β-cell has not been tested. We utilized an informatics-based approach to develop a transcriptional signature of β-cell GA stress using existing RNA sequencing and microarray datasets generated using human islets from donors with diabetes and islets where type 1(T1D) and type 2 diabetes (T2D) had been modeled ex vivo. To narrow our results to GA-specific genes, we applied a filter set of 1,030 genes accepted as GA associated. -

Transcriptome Dynamics and Potential Roles of Sox6 in the Postnatal Heart
RESEARCH ARTICLE Transcriptome Dynamics and Potential Roles of Sox6 in the Postnatal Heart Chung-Il An1☯*, Yasunori Ichihashi2☯¤a¤b*, Jie Peng3, Neelima R. Sinha2, Nobuko Hagiwara1* 1 Division of Cardiovascular Medicine, Department of Internal Medicine, University of California Davis, Davis, California, United States of America, 2 Department of Plant Biology, University of California Davis, Davis, California, United States of America, 3 Department of Statistics, University of California Davis, Davis, California, United States of America ☯ These authors contributed equally to this work. a11111 ¤a Current address: RIKEN Center for Sustainable Resource Science, Yokohama, Kanagawa, Japan ¤b Current address: JST, PRESTO, Kawaguchi, Saitama, Japan * [email protected] (CA); [email protected] (YI); [email protected] (NH) Abstract OPEN ACCESS The postnatal heart undergoes highly coordinated developmental processes culminating in Citation: An C-I, Ichihashi Y, Peng J, Sinha NR, the complex physiologic properties of the adult heart. The molecular mechanisms of postna- Hagiwara N (2016) Transcriptome Dynamics and tal heart development remain largely unexplored despite their important clinical implications. Potential Roles of Sox6 in the Postnatal Heart. To gain an integrated view of the dynamic changes in gene expression during postnatal PLoS ONE 11(11): e0166574. doi:10.1371/journal. heart development at the organ level, time-series transcriptome analyses of the postnatal pone.0166574 hearts of neonatal through adult mice (P1, P7, P14, P30, and P60) were performed using a Editor: Katherine Yutzey, Cincinnati Children's newly developed bioinformatics pipeline. We identified functional gene clusters by principal Hospital Medical Center, UNITED STATES component analysis with self-organizing map clustering which revealed organized, discrete Received: July 16, 2016 gene expression patterns corresponding to biological functions associated with the neona- Accepted: October 31, 2016 tal, juvenile and adult stages of postnatal heart development. -

Glioblastoma Stem Cells Induce Quiescence in Surrounding Neural Stem Cells Via Notch Signalling
bioRxiv preprint doi: https://doi.org/10.1101/856062; this version posted November 29, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. Glioblastoma stem cells induce quiescence in surrounding neural stem cells via Notch signalling. Katerina Lawlor1, Maria Angeles Marques-Torrejon2, Gopuraja Dharmalingham3, Yasmine El-Azhar1, Michael D. Schneider1, Steven M. Pollard2§ and Tristan A. Rodríguez1§ 1National Heart and Lung Institute, Imperial College London, Hammersmith Hospital Campus, Du Cane Road, London W12 0NN, United Kingdom. 2 MRC Centre for Regenerative Medicine & Edinburgh Cancer Research UK Centre, University of Edinburgh, Edinburgh, UK. 3MRC London Institute of Medical Sciences, Institute of Clinical Sciences, Imperial College London, UK §Authors for correspondence: [email protected] and [email protected] Running title: Glioblastoma stem cell competition Keyword: Neural stem cells, quiescence, glioblastoma, Notch, cell competition 1 bioRxiv preprint doi: https://doi.org/10.1101/856062; this version posted November 29, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. 1 Abstract 2 There is increasing evidence suggesting that adult neural stem cells (NSCs) are a cell of 3 origin of glioblastoma, the most aggressive form of malignant glioma. The earliest stages of 4 hyperplasia are not easy to explore, but likely involve a cross-talk between normal and 5 transformed NSCs. How normal cells respond to this cross-talk and if they expand or are 6 outcompeted is poorly understood. -

Supplemental Materials ZNF281 Enhances Cardiac Reprogramming
Supplemental Materials ZNF281 enhances cardiac reprogramming by modulating cardiac and inflammatory gene expression Huanyu Zhou, Maria Gabriela Morales, Hisayuki Hashimoto, Matthew E. Dickson, Kunhua Song, Wenduo Ye, Min S. Kim, Hanspeter Niederstrasser, Zhaoning Wang, Beibei Chen, Bruce A. Posner, Rhonda Bassel-Duby and Eric N. Olson Supplemental Table 1; related to Figure 1. Supplemental Table 2; related to Figure 1. Supplemental Table 3; related to the “quantitative mRNA measurement” in Materials and Methods section. Supplemental Table 4; related to the “ChIP-seq, gene ontology and pathway analysis” and “RNA-seq” and gene ontology analysis” in Materials and Methods section. Supplemental Figure S1; related to Figure 1. Supplemental Figure S2; related to Figure 2. Supplemental Figure S3; related to Figure 3. Supplemental Figure S4; related to Figure 4. Supplemental Figure S5; related to Figure 6. Supplemental Table S1. Genes included in human retroviral ORF cDNA library. Gene Gene Gene Gene Gene Gene Gene Gene Symbol Symbol Symbol Symbol Symbol Symbol Symbol Symbol AATF BMP8A CEBPE CTNNB1 ESR2 GDF3 HOXA5 IL17D ADIPOQ BRPF1 CEBPG CUX1 ESRRA GDF6 HOXA6 IL17F ADNP BRPF3 CERS1 CX3CL1 ETS1 GIN1 HOXA7 IL18 AEBP1 BUD31 CERS2 CXCL10 ETS2 GLIS3 HOXB1 IL19 AFF4 C17ORF77 CERS4 CXCL11 ETV3 GMEB1 HOXB13 IL1A AHR C1QTNF4 CFL2 CXCL12 ETV7 GPBP1 HOXB5 IL1B AIMP1 C21ORF66 CHIA CXCL13 FAM3B GPER HOXB6 IL1F3 ALS2CR8 CBFA2T2 CIR1 CXCL14 FAM3D GPI HOXB7 IL1F5 ALX1 CBFA2T3 CITED1 CXCL16 FASLG GREM1 HOXB9 IL1F6 ARGFX CBFB CITED2 CXCL3 FBLN1 GREM2 HOXC4 IL1F7