Doctoral Thesis 2017 Adding Fault Tolerance to A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
MPLS-Based Metro Ethernet Networks a Tutorial • Paresh Khatri • 2018
MPLS-based Metro Ethernet Networks A tutorial • Paresh Khatri • 2018 1 © Nokia 2017 Public Agenda 1. Introduction 2. Introduction to Metro Ethernet Services 3. Traditional Metro Ethernet networks 4. Delivering Ethernet over MPLS 5. Summary 6. Questions 2 © Nokia 2017 Public introduction 3 © Nokia 2017 Public Introduction • Paresh Khatri ([email protected]) - Chief Architect – IP Routing & Transport APAC, Alcatel-Lucent • Key focus areas: - End-to-end network architectures - SDN/NFV - Large-scale IP/MPLS networks - L2/L3 VPNs - Carrier Ethernet - Next-generation mobile backhaul networks • Acknowledgements: - Some figures and text are provided courtesy of the Metro Ethernet Forum (MEF) 4 © Nokia 2017 Public introduction to metro ethernet services 5 © Nokia 2017 Public AGenda 2. Introduction to Metro Ethernet Services a) Why Metro Ethernet ? b) Attributes of Carrier Ethernet c) Carrier Ethernet Services defined by the MEF 6 © Nokia 2017 Public 2.1 Why Metro Ethernet ? 7 © Nokia 2017 Public Introduction to Metro Ethernet Services What is Metro Ethernet ? “… generally defined as the network that bridges or connects geographically separated enterprise LANs while also connecting across the WAN or backbone networks that are generally owned by service providers. The Metro Ethernet Networks provide connectivity services across Metro geography utilising Ethernet as the core protocol and enabling broadband applications” from “Metro Ethernet Networks – A Technical Overview” from the Metro Ethernet Forum 8 © Nokia 2017 Public Introduction to Metro -
Navigating Network Migration Challenges: Upgrade Your 1GE
Navigating Network Migration Challenges: Upgrade Your 1GE Metro Ethernet Access Network to 10GE A White Paper from Telco Systems Upgrade Your 1GE Metro Ethernet Access Network to 10GE | 2 Intoduction Many businesses and service providers are migrating from • Service providers are finding it more difficult to live up to 1GE to 10GE networks as they attempt to avoid the obstacles their customers’ service level agreements (SLA) to presented by heavy bandwidth, while leveraging the benefits provide multiple services, which require more bandwidth that 10GE networking has to offer. The requirement for • Generating more revenue within the current limits of a more bandwidth has become a constant battle. As internet 1Gig network usage continues to increase with the popularity of data and streaming services, so does the demand for more bandwidth. As the gap between service revenues and the demand for From education (homework, e-learning, campus networks), higher bandwidth grows, providers are looking for ways to finance (online banking, stock trading, bill pay), and business better control their expenses while offering higher bandwidth purposes (company intranets, remote workers), to social media and more services to more customers. With the increasing (Facebook, Instagram, Twitter, Snapchat), political (campaigns demand for more bandwidth with OTT (over-the-top) and outreach) and personal purposes, data requirements applications like video streaming, Hulu, Netflix, and Amazon continue to rise – quicker than service providers can react. Prime becoming more popular, 1GE networks aren’t going to cut it anymore. In support of these activities, service providers are being driven to enhance their network capacities in their business Ethernet, To conquer these challenges, enterprises and service mobile backhaul, E-Rate, cloud networking, and SDN & NFV providers are migrating their 1GE networks to 10GE. -

T-Metro 200 Carrier Ethernet Multi-Service Ces Aggregation
T-Metro 200 carrier ethernet multi-service ces aggregation The T-Metro 200 is a feature-rich multiservice access device designed to increase service provider revenues and deliver a complete portfolio of voice, data and video services. The T-Metro family of products supports a wide variety of technologies including Ethernet, circuit emulation services (CES), MPLS, OAM (operations, administration and maintenance) tools and hierarchical quality of service (HQoS). This rich combination of technologies PRODUCT HIGHLIGHTS allows service providers to deliver an enhanced service offering while Enhanced Ethernet services, maintaining competitive pricing. features and capabilities The T-Metro 200 provides access to advanced data services such as virtual – 802.1ad provider bridges for Ethernet private LAN services (VPLS), virtual private wire services (VPWS) and IP virtual based L2VPN services private network (IP-VPN) services. In addition, the T-Metro product line enables – Super VLAN for traffic isolation service providers to carry native TDM traffic transparently across packet – Fast-Ring with sub 50ms recovery switched networks (PSN), using various circuit emulation techniques. The TDM traffic is encapsulated in Ethernet or IP frames to emulate the functionality of a – IEEE 802.3ad link aggregation TDM circuit, ensuring that all original feature-sets are preserved. Circuit Emulation Services deliver traditional voice or leased line Designed for Metro Ethernet Services services Convergence of voice, data and video services over a single Ethernet-based – Structured agnostic traffic over infrastructure is transforming the way enterprises and service providers packet (SAToP) conduct their businesses. The T-Metro 200’s versatility, advanced feature-set, – CES over packet switched networks wire speed performance and robust design makes it an ideal convergence (CESoPSN) platform for metro applications, either in a bridged metro Ethernet or MPLS – T1/E1; DS3/T3, OC-3/STM-1 environment. -
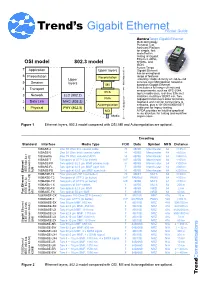
Gigabit Ethernet Pocket Guide
GbE.PocketG.fm Page 1 Friday, March 3, 2006 9:43 AM Carrier Class Ethernet, Metro Ethernet tester, Metro Ethernet testing, Metro Ethernet installation, Metro Ethernet maintenance, Metro Ethernet commissioning, Carrier Class Ethernet tester, Carrier Class Ethernet testing, Carrier Class Ethernet installation, Carrier Class Ethernet maintenance, Gigabit Ethernet tester, Gigabit Ethernet testing, Gigabit Ethernet installation, Gigabit Ethernet maintenance, Gigabit Ethernet commissioning, Gigabit Ethernet protocols, 1000BASE-T tester, 1000BASE-LX test, 1000BASE-SX test, 1000BASE-T testing, 1000BASE-LX testing Trend’s Gigabit EthernetPocket Guide AuroraTango Gigabit Ethernet Multi-technology Personal Test Assistant Platform for simple, fast and effective testing of Gigabit Ethernet, ADSL, OSI model 802.3 model SHDSL, and ISDN. Aurora Tango 7 Application Upper layers Gigabit Ethernet has an exceptional 6 Presentation Reconciliation range of features Upper ensuring reliable delivery of end-to-end 5 Session layers services over Metropolitan networks MII Media independent based on Gigabit Ethernet. 4 It includes a full range of tests and Transport measurements, such as RFC-2544, PCS top ten addresses, real-time Ethernet 3 Network LLC (802.2) statistics, multilayer BERT, etc. Two PMA Gigaport transceivers allow terminate, 2 Data Link MAC (803.3) loopback and monitor connections to Autonegotiation networks, plus a 10/100/1000BASE-T Physical cable port for legacy testing. 1 PHY (802.3) dependent Media MDI A PDA provides an intuitive graphical menu -
Carrier Ethernet Tutorial
Carrier . Ethernet Raj Jain Washington University in Saint Louis Saint Louis, MO 63130 [email protected] These slides and audio/video recordings of this class lecture are at: http://www.cse.wustl.edu/~jain/cse570-19/ Washington University in St. Louis http://www.cse.wustl.edu/~jain/cse570-19/ ©2019 Raj Jain 6-1 Overview 1. Enterprise vs Carrier Ethernet 2. UNI vs Peer-to-Peer Signaling 3. Metro Ethernet 4. Ethernet Provider Bridge (PB) 5. Provider Backbone Network (PBB) 6. Connection Oriented Ethernet Note: Although these technologies were originally developed for carriers, they are now used inside multi-tenant data centers Washington(clouds) University in St. Louis http://www.cse.wustl.edu/~jain/cse570-19/ ©2019 Raj Jain 6-2 Enterprise vs. Carrier Ethernet Enterprise Carrier Distance: up to 2km Up to 100 km Scale: Few K MAC addresses Millions of MAC Addresses 4096 VLANs Millions of VLANs Q-in-Q Protection: Spanning tree Shortest Path Routing Path determined by spanning Traffic engineered path tree Simple service SLA Priority ⇒ Aggregate QoS Need per-flow QoS No performance/Error Need performance/BER monitoring (OAM) Washington University in St. Louis http://www.cse.wustl.edu/~jain/cse570-19/ ©2019 Raj Jain 6-3 Carriers vs. Enterprise We need to exchange topology for Sorry, We can’t tell you optimal routing. anything about our internal network. Washington University in St. Louis http://www.cse.wustl.edu/~jain/cse570-19/ ©2019 Raj Jain 6-4 Network Hierarchy Provider Provider Backbone Provider Customer Bridge Network Bridge Network Bridge Network Customer Network (PBN) (PBBN) (PBN) Network Backbone Provider Provider Core Core Core Bridge Bridge Bridge Customer Provider Provider Customer Edge Edge Backbone Edge Edge Bridge Bridge Provider Backbone Edge Provider Bridge Bridge Edge Edge Bridge Edge Bridge Bridge Bridge Washington University in St. -

Metro Ethernet Design Guide
Design and Implementation Guide Juniper Networks Metro Ethernet Design Guide August 2016 ii © 2016 Juniper Networks, Inc. Design and Implementation Guide Juniper Networks, Inc. 1133 Innovation Way Sunnyvale, California 94089 USA 408-745-2000 www.juniper.net Copyright © 2016, Juniper Networks, Inc. All rights reserved. © 2016 Juniper Networks, Inc. iii Design and Implementation Guide Table of Contents Chapter 1 Introduction ............................................................................................................... 1 Using MPLS with Metro Ethernet ........................................................................................... 1 Metro Ethernet Solutions ......................................................................................................... 2 Chapter 2 Metro Ethernet Overview ......................................................................................... 3 Metro Ethernet Service Types ..................................................................................................... 5 Carrier Ethernet Overview........................................................................................................... 5 Carrier Ethernet Certification ................................................................................................... 6 Chapter 3 Architecture Overview .............................................................................................. 7 Juniper Networks Portfolio for Metro Ethernet Networks ......................................................... -

Optical Transport Networks & Technologies Standardization Work
Optical Transport Networks & Technologies Standardization Work Plan Issue 24, February 2018 GENERAL ........................................................................................................................... 3 PART 1: STATUS REPORTS AS OF JANUARY 2018 ...................................................... 4 1 HIGHLIGHT OF ITU-T SG15 ........................................................................................ 4 2 REPORTS FROM OTHER ORGANIZATIONS ............................................................ 4 PART 2: STANDARD WORK PLAN ................................................................................... 8 1 INTRODUCTION TO PART 2 ...................................................................................... 8 2 SCOPE ......................................................................................................................... 8 3 ABBREVIATIONS ........................................................................................................ 8 4 DEFINITIONS AND DESCRIPTIONS .......................................................................... 9 4.1 Optical and other Transport Networks & Technologies (OTNT) ....................................................... 9 4.2 Optical Transport Network (OTN) (largely revised in 09/2016 reflecting B100G) ............................ 9 4.2.1 FlexE in OIF (updated in June-2017) .......................................................................................... 11 4.3 Support for mobile networks (reference to ITU-R M2375 added -

Metro Ethernet and Ethernet OAM
Metro Ethernet and Ethernet OAM Santanu Dasgupta ([email protected]) © 2007 Cisco Systems, Inc. All rights reserved. Cisco Confidential 1 House Rules . Please put your mobile phones into silent mode. Kindly do not take calls inside of this room while the session is going on. Your feedback on the session is extremely important! © 2007 Cisco Systems, Inc. All rights reserved. 2 Assumptions . You have a basic understanding of Metro-E technology & the services delivered through it. You have some basic understanding of OAM in general. You will be awake throughout the presentation! © 2007 Cisco Systems, Inc. All rights reserved. 3 Metro Ethernet : Agenda . Business Connectivity—The Landscape . Why Ethernet? The Evolution . Carrier Ethernet— Technology Primer . Carrier Ethernet Services Flow . Ethernet OAM © 2007 Cisco Systems, Inc. All rights reserved. 4 Once Upon a Long Ago… . 1972 Dr Robert Metcalfe implemented the Alto Aloha Network at Xerox Parc . 1976 The name Ethernet was first used © 2007 Cisco Systems, Inc. All rights reserved. 5 Business Connectivity – The Landscape © 2007 Cisco Systems, Inc. All rights reserved. 6 Business Connectivity The Landscape . Geographically diverse business locations . Distributed applications require LAN extension . Multiple customers over a single infrastructure . Killer applications driving next generation Layer 2 VPNs . Active/Active or Active/Backup resiliency configurations © 2007 Cisco Systems, Inc. All rights reserved. 7 Site-to-Site Connectivity The Answer: Carrier Ethernet . L2VPNs must evolve . Ethernet: The next step . Ethernet provides More bandwidth than traditional L2VPNs True LAN extension between remote areas . Customer Ethernet connected via SP Ethernet . BFD with MPLS Fast ReRoute can minimize downtime . Multiple redundancy models can be deployed © 2007 Cisco Systems, Inc. -

Powercomm: World’S Largest Metro Ethernet Deployment
CASE STUDY PowerComm: World’s Largest Metro Ethernet Deployment PowerComm is a facility-based telecommunications carrier and is a subsidiary of KEPCO, Korea's National Electric Power Corporation. PowerComm operates the largest high-quality, fiber comm optic network in Korea and is building a nation-wide, high-speed telecommunications network. PowerComm is the first national telecommunications carrier to deploy an all-Ethernet metropolitan area network in Korea based on advanced Riverstone service-creation routers. PowerComm is installing over 1,000 Riverstone routers in the greater Seoul metropolitan area to create the world's largest metro Ethernet network. PowerComm’s next-generation network will unify its cable and last-mile Ethernet sub-networks, allowing the national carrier to offer its own advanced telecommunications services while leasing the network to other service providers in Seoul and neighboring areas. PowerComm’s Network Infrastructure PowerComm’s network consists of over 60,000 km of optical fiber and over 4,000 km of High Frequency Cable (HFC) network throughout Korea. PowerComm’s objective is to provide fair and reasonable access to its telecommunications network for companies and service providers, enhancing competition in the telecommunications industry in accordance with the Korean government’s goal to restructure the public sector. The optical fiber network leverages KEPCO’s electrical power transmission towers and electrical distribution pylons throughout Korea, reaching even the most remote regions of the country. The network provides facility-based telecommunications service providers with a stable and high-quality infrastructure. PowerComm’s customers include: • Wireless communication providers that lease telecommunication facilities, such as exchanges, base stations, and relay stations. -
MLA Or APA Why Cite Sources
Citing Sources in MLA or APA Why cite sources • Your teacher requires it. • Your readers can check your sources for accuracy or context. • Your topic and/or writing may inspire your readers to research your topic in more depth and the bibliography/works cited list can give them a place to start. • In order to avoid plagiarism, it is important to “Give credit where credit is due” and always identify the source of non- original material used in your paper. • A quick scan of your citations gives your readers an idea of the caliber of your sources and thus the caliber of your exposition. When citing sources • Be consistent with style elements. • Include all available appropriate information to enable readers to find your source. • Adhere to style guidelines so that your readers can quickly determine the format* of the original source. • Create bibliographic/work cited citations on-the-fly as you research your topic. • Create a citation for each useful resource whether you quote or paraphrase anything from it in the final paper or not – sources not cited within the body of the paper should not be included in the final works cited list. *Format may be book, journal article, newspaper article, Web page, interview, radio broadcast, doctoral thesis, government report, blog, and so on. Each format will require slightly different information in the citation to enable future retrieval. Style Guides There are many style manuals that provide guidelines for specific disciplines, industries, or uses. A few of the most popular manuals are listed below; there are others so be sure to use the manual recommended by your instructor. -

Standards Style Manual
2012 IEEE Standards Style Manual 20120B IEEE Standards Style Manual Contents 1. Overview .................................................................................................................................................... 1 2. Helpful documents ...................................................................................................................................... 1 3. Using IEEE templates to write the draft ..................................................................................................... 2 4. Editorial responsibilities and duties of the sponsor .................................................................................... 3 5. Submission of IEEE drafts and source files to the IEEE-SA Standards Board .......................................... 3 6. Copyright and permissions ......................................................................................................................... 4 6.1 General copyright policy ..................................................................................................................... 4 6.2 Excerpting material published by other organizations ......................................................................... 4 7. Patents ........................................................................................................................................................ 5 8. Trademarks ................................................................................................................................................ -

Vol 15 No 1-2 January-February 2015
(http://www.ieee.org/conferences_events/c onferences/conferencedetails/index.html?Co nf_ID=35071) being organized by Bharati Vidyapeeth's vol 15 no 1-2 Institute of Computer Applications and Management (BVICAM), A-4, Paschim Vihar, January-February 2015 Rohtak Road, New Delhi - 110063, India from March 11 to 13, 2015 From the desk of ECC (www.bvicam.ac.in/indiacom/) My dear esteemed Members, 2015 International Conference on Signal We are now in our 15th year of existence Processing and Communication (ICSC 2015) starting with the first issue of January & (http://www.ieee.org/conferences_events/c February bringing to your notice the onferences/conferencedetails/index.html?Co composition of Section Executive Committee nf_ID=34456) for the current year, membership strength being organized by Jaypee Institute of along with other facts and figures that you Information Technology, A-10 Sector 62, may find interesting. Noida 201307, Delhi NCR, India from March 16 to 18, 2015 With best regards and wishes, (www.jiit.ac.in/jiit/icsc/index.php) International Conference on Soft Computing Techniques and Implementations 2015 (Dr. Subrata Mukhopadhyay) (ICSCTI 2015) IEEE Delhi Section (http://www.ieee.org/conferences_events/c February 28, 2015 (Saturday) onferences/conferencedetails/index.html?Co New Delhi nf_ID=35875) E-mail: [email protected] being organized by Manav Rachna Web-site: www.ewh.ieee.org/r10/delhi International University (MRIU), Faridabad, Haryana, India from October 15 to 17, 2015 Schedule of Lecture(s) (www.icscta2015.org) Surf IEEE