The Development of a 48V, 10Kwh Lifepo4 Battery Management System for Low Voltage Battery Storage Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Digital Camera RICOH WG-50 Operating Manual
e_kb589_EN.book Page 1 Friday, March 24, 2017 1:49 PM RICOH IMAGING COMPANY, LTD. 1-3-6, Nakamagome, Ohta-ku, Tokyo 143-8555, JAPAN (http://www.ricoh-imaging.co.jp) RICOH IMAGING EUROPE Parc Tertiaire SILIC 7-9, avenue Robert Schuman - S.A.S. B.P. 70102, 94513 Rungis Cedex, FRANCE (http://www.ricoh-imaging.eu) RICOH IMAGING 5 Dedrick Place, West Caldwell, New Jersey 07006, AMERICAS CORPORATION U.S.A. Digital Camera (http://www.us.ricoh-imaging.com) RICOH IMAGING CANADA 5520 Explorer Drive Suite 300, Mississauga, Ontario, INC. L4W 5L1, CANADA (http://www.ricoh-imaging.ca) Operating Manual RICOH IMAGING CHINA 23D, Jun Yao International Plaza, 789 Zhaojiabang CO., LTD. Road, Xu Hui District, Shanghai, 200032, CHINA (http://www.ricoh-imaging.com.cn) http://www.ricoh-imaging.co.jp/english This contact information may change without notice. Please check the latest information on our websites. • Specifications and external dimensions are subject to change without notice. To ensure the best performance from your camera, please read the Operating Manual before using the camera. Copyright © RICOH IMAGING COMPANY, LTD. 2017 R01BAC17 Printed in Japan e_kb589_EN.book Page 2 Friday, March 24, 2017 1:49 PM Thank you for purchasing this RICOH WG-50 Digital Camera. Memo Please read this manual before using the camera in order to get the most out of all the features and functions. Keep this manual safe, as it can be a valuable tool in helping you to understand all the camera’s capabilities. Regarding copyrights Images taken with this digital camera that are for anything other than personal enjoyment cannot be used without permission according to the rights as specified in the Copyright Act. -

Standards Action Layout SAV3528.Fp5
PUBLISHED WEEKLY BY THE AMERICAN NATIONAL STANDARDS INSTITUTE 25 West 43rd Street, NY, NY 10036 VOL. 35, #28 July 9, 2004 Contents American National Standards Call for Comment on Standards Proposals ................................................ 2 Call for Comment Contact Information ....................................................... 9 Final Actions.................................................................................................. 11 Project Initiation Notification System (PINS).............................................. 14 International Standards ISO and IEC Newly Published Standards.................................................... 18 Registration of Organization Names in the U.S............................................ 21 Proposed Foreign Government Regulations................................................ 21 Information Concerning ................................................................................. 22 Standards Action is now available via the World Wide Web For your convenience Standards Action can now be down- loaded from the following web address: http://www.ansi.org/news_publications/periodicals/standards _action/standards_action.aspx?menuid=7 American National Standards Call for comment on proposals listed This section solicits public comments on proposed draft new American National Standards, including the national adoption of Ordering Instructions for "Call-for-Comment" Listings ISO and IEC standards as American National Standards, and on 1. Order from the organization indicated for -

Exercise 10 ‐ Batteries
WS 2019/2020 Elektrochemie Prof. Petr Novák Exercise 10 ‐ Batteries Assistant: Laura Höltschi ([email protected]) Exercise 1: (a) What are “batteries” (Provide a definition)? Batteries are electrochemical devices which store electrical energy in the form of chemical energy. The electrochemical cells may be connected in series or in parallel, or a combination thereof, to constitute a battery module or battery pack. (b) Batteries are divided in groups such as primary and secondary cells. Characterize both groups (definition) and give 2 examples for both types of cells. What are the advantages and disadvantages of both groups? Provide some applications for both types of cells. Primary cells: Batteries that can only be discharged once and cannot be recharged (irreversible). Examples: Alkaline batteries, primary zinc‐air batteries, some lithium batteries Advantages(+): Long calendar life/low self‐discharge, very robust (large domain of applications) Disadvantages(‐): can only be used once (problem for recycling (trash), expensive) Secondary cells: Batteries that can be charged and discharged multiple times (reversible). Examples: nickel‐cadmium battery, lead‐acid battery, lithium‐ion batteries,… Advantages(+): reusable, low operating costs Disadvantages(‐): often high self‐discharge, domain of application/storage under optimal conditions required, destruction due to depth of discharge, rapid charge or overcharge, high investment costs, often bad cycling stability,… Examples of application domains: Primary cells: constant and small energy extraction over long time periods – watches, data storage units, measurement devices,… Secondary cells: high and permanent (mobile) energy demand (mobile phone, lap‐tops, batteries for cars and electro‐mobility), where there might be a need to recharge multiples times. Exercise 2: An alkaline battery is an example of a primary battery and the reaction shown below is the cell reaction during discharge. -

Energizer Zinc Air Prismatic Handbook
Energizer Zinc Air Prismatic Handbook Including performance and design data for the PP355 Page | 2 Energizer Zinc Air Prismatic Handbook 1. Battery Overview ............................................................................................................................. 3 1.1 Zinc Air Chemistry ............................................................................................................................... 3 1.2 Construction ........................................................................................................................................ 3 1.3 Features of Zinc Air Prismatic ............................................................................................................. 4 1.4 Zinc Air Prismatic Battery Sizes ........................................................................................................... 6 2. PP355 Performance Characteristics .................................................................................................. 7 2.1 Performance at Standard Conditions .................................................................................................. 7 2.2 Performance at Other Environmental Conditions .............................................................................. 8 2.3 Pulse Capability ................................................................................................................................... 9 2.4 Service Maintenance ........................................................................................................................ -

Study Into Market Share and Stocks and Flows of Handheld Batteries in Australia
National Environment Protection Council Service Corporation Study into market share and stocks and flows of handheld batteries in Australia Trend analysis and market assessment report Final report Project name: Study into market share and stocks and flows of handheld batteries in Australia Report title: Trend analysis and market assessment report Authors: Kyle O’Farrell, Raphael Veit, Dan A’Vard Reviewers: Peter Allan, David Perchard Project reference: A14801 Sustainable Resource Use Pty Ltd (ABN 52 151 861 602) Document reference: R03‐05‐A14801 Suite G‐03, 60 Leicester Street, Carlton VIC 3053 Date: 14 July 2014 www.sru.net.au Disclaimer This report has been prepared on behalf of and for the exclusive use of National Environment Protection Council Service Corporation, and is subject to and issued in accordance with the agreement between National Environment Protection Council Service Corporation, and Sustainable Resource Use Pty Ltd. Sustainable Resource Use Pty Ltd accepts no liability or responsibility whatsoever for any use of or reliance upon this report by any third party. Study into market share and stocks and flows of handheld batteries in Australia Page ii Sustainable Resource Use Pty Ltd CONTENTS EXECUTIVE SUMMARY ........................................................................................................................... 5 E-1 Purpose ..................................................................................................................................... 5 E-2 Scope of this report ........................................................................................................... -

Appendix: Battery Standards
Appendix: Battery Standards The International Electrochemical Commission battery. These characteristics are: (lEC) have prepared a battery standards speci a) Dimensions and terminals (physical inter fication: lECPublication 86: Primary Cel/sand changeability) Batteries , parts 1 and 2, 1975. The relevant b) Voltage and electrical performance (elec British Standard is BS 397. Both are available trical interchangeability) from the British Standards Institution, 2 Park Street, London WlA 2BS. At the present time there are three possible The American National Standard, ANSI sources of such information. C18.l, is available from ANSI, 1430 Broadway, The battery manufacturer publishes litera New York 10018. ture describing his products and sometimes The Japanese Standards Association issues includes recommendations for the battery to Standard 115 8501 Dry Cellsand Batteries; 115 be used in specific equipment. In the nature 8508 Mercury Cells and Batteries ; 115 8509 of things this information is not complete. Alkaline-Manganese Dioxide Cells and Bat The equipment manufacturer may include teries ;115 8510 SilverOxide Cellsand Batteries; in the equipment a label stating the specific 115 8511 Alkaline Primary Cells and Batteries. type of battery to be used,or the size required. All are available through Japanese Embassies Often a more detailed list of approved bat or direct from the Japanese Standards Associ teries is given in the equipment instruction ation, 1-24 Akasaka 4 Chome , Minato-ku, manual but again this islikely to be incomplete. Tokyo. Furthermore the information may lead to The following is an extract from The lEC frustration when the equipment originates in System of Battery Designation, prepared by a different country from that in which the IEC Technical Committee No. -
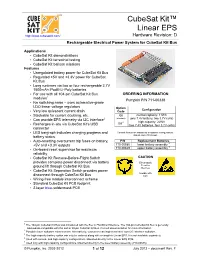
Cubesat Kit Linear EPS Rev
TM CubeSat Kit™ Linear EPS http://www.cubesatkit.com/ Hardware Revision: D Rechargeable Electrical Power System for CubeSat Kit Bus Applications • CubeSat Kit demonstrations • CubeSat Kit terrestrial testing • CubeSat Kit balloon missions Features • Unregulated battery power for CubeSat Kit Bus • Regulated +5V and +3.3V power for CubeSat Kit Bus • Long runtimes via two or four rechargeable 3.7V 1500mAh iPod® Li-Poly batteries • For use with all 104-pin CubeSat Kit Bus ORDERING INFORMATION modules1 Pumpkin P/N 711-00338 • No switching noise – uses automotive-grade LDO linear voltage regulators Option Configuration • Very low quiescent current drain Code • Stackable for current doubling, etc. /00 normal capacity: 11Wh 2 (standard) (one 7.4V battery, two 3.7V cells) • Can provide EPS telemetry via I2C interface 3 high capacity: 22Wh • /01 Recharges in-situ via CubeSat Kit's USB (two 7.4V batteries, four 3.7V cells) connector • LED bargraph indicates charging progress and Contact factory for availability of optional configurations. Option code /00 shown. battery status • Auto-resetting overcurrent trip fuses on battery, P/N Replacement Batteries 710-00585 lower battery assembly 4 +5V and +3.3V outputs 5 • 710-00829 upper battery assembly On-board reset supervisor for maximum reliability • CubeSat Kit Remove-Before-Flight Switch CAUTION provides complete power disconnect via battery Electrostatic Sensitive ground lift through CubeSat Kit Bus Devices • CubeSat Kit Separation Switch provides power Handle with disconnect through CubeSat Kit Bus Care • Wiring-free module interconnect scheme • Standard CubeSat Kit PCB footprint • 2-layer blue-soldermask PCB 1 The 104-pin CubeSat Kit Bus was introduced with the Rev C FM430 architecture. -

Operations Manual Tandberg EN8090 MPEG4 HD Encoder
ST.RE.E10233.1 Issue 1 REFERENCE GUIDE EN8000 MPEG-4 Part 10 (H.264/AVC) Encoders Software Version 1.0 (and later) EN8030 Standard Definition Encoder EN8090 High Definition Encoder Preliminary Pages ENGLISH (UK) ITALIANO READ THIS FIRST! LEGGERE QUESTO AVVISO PER PRIMO! If you do not understand the contents of this manual Se non si capisce il contenuto del presente manuale DO NOT OPERATE THIS EQUIPMENT. NON UTILIZZARE L’APPARECCHIATURA. Also, translation into any EC official language of this manual can be È anche disponibile la versione italiana di questo manuale, ma il costo è made available, at your cost. a carico dell’utente. SVENSKA NEDERLANDS LÄS DETTA FÖRST! LEES DIT EERST! Om Ni inte förstår informationen i denna handbok Als u de inhoud van deze handleiding niet begrijpt ARBETA DÅ INTE MED DENNA UTRUSTNING. STEL DEZE APPARATUUR DAN NIET IN WERKING. En översättning till detta språk av denna handbok kan också anskaffas, U kunt tevens, op eigen kosten, een vertaling van deze handleiding på Er bekostnad. krijgen. PORTUGUÊS SUOMI LEIA O TEXTO ABAIXO ANTES DE MAIS NADA! LUE ENNEN KÄYTTÖÄ! Se não compreende o texto deste manual Jos et ymmärrä käsikirjan sisältöä NÃO UTILIZE O EQUIPAMENTO. ÄLÄ KÄYTÄ LAITETTA. O utilizador poderá também obter uma tradução do manual para o Käsikirja voidaan myös suomentaa asiakkaan kustannuksella. português à própria custa. FRANÇAIS DANSK AVANT TOUT, LISEZ CE QUI SUIT! LÆS DETTE FØRST! Si vous ne comprenez pas les instructions contenues dans ce manuel Udstyret må ikke betjenes NE FAITES PAS FONCTIONNER CET APPAREIL. MEDMINDRE DE TIL FULDE FORSTÅR INDHOLDET AF DENNE HÅNDBOG. -

Ministry of Defence Acronyms and Abbreviations
Acronym Long Title 1ACC No. 1 Air Control Centre 1SL First Sea Lord 200D Second OOD 200W Second 00W 2C Second Customer 2C (CL) Second Customer (Core Leadership) 2C (PM) Second Customer (Pivotal Management) 2CMG Customer 2 Management Group 2IC Second in Command 2Lt Second Lieutenant 2nd PUS Second Permanent Under Secretary of State 2SL Second Sea Lord 2SL/CNH Second Sea Lord Commander in Chief Naval Home Command 3GL Third Generation Language 3IC Third in Command 3PL Third Party Logistics 3PN Third Party Nationals 4C Co‐operation Co‐ordination Communication Control 4GL Fourth Generation Language A&A Alteration & Addition A&A Approval and Authorisation A&AEW Avionics And Air Electronic Warfare A&E Assurance and Evaluations A&ER Ammunition and Explosives Regulations A&F Assessment and Feedback A&RP Activity & Resource Planning A&SD Arms and Service Director A/AS Advanced/Advanced Supplementary A/D conv Analogue/ Digital Conversion A/G Air‐to‐Ground A/G/A Air Ground Air A/R As Required A/S Anti‐Submarine A/S or AS Anti Submarine A/WST Avionic/Weapons, Systems Trainer A3*G Acquisition 3‐Star Group A3I Accelerated Architecture Acquisition Initiative A3P Advanced Avionics Architectures and Packaging AA Acceptance Authority AA Active Adjunct AA Administering Authority AA Administrative Assistant AA Air Adviser AA Air Attache AA Air‐to‐Air AA Alternative Assumption AA Anti‐Aircraft AA Application Administrator AA Area Administrator AA Australian Army AAA Anti‐Aircraft Artillery AAA Automatic Anti‐Aircraft AAAD Airborne Anti‐Armour Defence Acronym -

IT Acronyms at Your Fingertips a Quick References Guide with Over 3,000 Technology Related Acronyms
IT Acronyms at your fingertips A quick references guide with over 3,000 technology related acronyms IT Acronyms at your Fingertips We’ve all experienced it. You’re sitting in a meeting and someone spouts off an acronym. You immediately look around the table and no one reacts. Do they all know what it means? Is it just me? We’re here to help! We’ve compiled a list of over 3,000 IT acronyms for your quick reference and a list of the top 15 acronyms you need to know now. Top 15 acronyms you need to know now. Click the links to get a full definition of the acronym API, Application Programmer Interface MDM, Mobile Device Management AWS, Amazon Web Services PCI DSS, Payment Card Industry Data Security Standard BYOA, Bring Your Own Apps SaaS, Software as a Service BYOC, Bring Your Own Cloud SDN, Software Defined Network BYON, Bring Your Own Network SLA, Service Level Agreement BYOI, Bring Your Own Identity VDI, Virtual Desktop Infrastructure BYOE, Bring Your Own Encryption VM, Virtual Machine IoT, Internet of Things Quick Reference, over 3000 IT acronyms Click the links to get a full definition of the acronym Acronym Meaning 10 GbE 10 gigabit Ethernet 100GbE 100 Gigabit Ethernet 10HD busy period 10-high-day busy period 1170 UNIX 98 121 one-to-one 1xRTT Single-Carrier Radio Transmission Technology 2D barcode two-dimensional barcode Page 1 of 91 IT Acronyms at your Fingertips 3270 Information Display System 3BL triple bottom line 3-D three dimensions or three-dimensional 3G third generation of mobile telephony 3PL third-party logistics 3Vs volume, variety and velocity 40GbE 40 Gigabit Ethernet 4-D printing four-dimensional printing 4G fourth-generation wireless 7W seven wastes 8-VSB 8-level vestigial sideband A.I. -

Battery Nomenclature - Wikipedia Page 1 of 13
Battery nomenclature - Wikipedia Page 1 of 13 Battery nomenclature From Wikipedia, the free encyclopedia Standard battery nomenclature describes portable dry cell batteries that have physical dimensions and electrical characteristics interchangeable between manufacturers. The long history of disposable dry cells means that many different manufacturer-specific and national standards were used to designate sizes, long before international standards were reached. Technical standards for battery sizes and types are set by standards organizations such as International Electrotechnical Commission (IEC) and American National Standards Institute (ANSI). Popular sizes are still referred to by old standard or manufacturer designations, and some non-systematic designations have been included in current international standards due to wide use. The complete nomenclature for the battery will fully specify the size, chemistry, terminal arrangements and special characteristics of a battery. The same physically interchangeable cell size may have widely different characteristics; physical interchangeability is not the sole factor in substitution of batteries. National standards for dry cell batteries have been developed by ANSI, JIS, British national standards, and others. Civilian, commercial, government and military standards all exist. Two of the most prevalent standards currently in use are the IEC 60086 series and the ANSI C18.1 series. Both standards give dimensions, standard performance characteristics, and safety information. Modern standards contain -
Glossaryvideo Terms and Acronyms This Glossary of Video Terms and Acronyms Is a Compilation of Material Gathered Over Time from Numer- Ous Sources
Glossaryvideo terms and acronyms This Glossary of Video Terms and Acronyms is a compilation of material gathered over time from numer- ous sources. It is provided "as-is" and in good faith, without any warranty as to the accuracy or currency of any definition or other information contained herein. Please contact Tektronix if you believe that any of the included material violates any proprietary rights of other parties. Video Terms and Acronyms Glossary 1-9 0H – The reference point of horizontal sync. Synchronization at a video 0.5 interface is achieved by associating a line sync datum, 0H, with every 1 scan line. In analog video, sync is conveyed by voltage levels “blacker- LUMINANCE D COMPONENT E A than-black”. 0H is defined by the 50% point of the leading (or falling) D HAD D A 1.56 µs edge of sync. In component digital video, sync is conveyed using digital 0 S codes 0 and 255 outside the range of the picture information. 0.5 T N E 0V – The reference point of vertical (field) sync. In both NTSC and PAL CHROMINANCE N COMPONENT O systems the normal sync pulse for a horizontal line is 4.7 µs. Vertical sync P M is identified by broad pulses, which are serrated in order for a receiver to O 0 0 C maintain horizontal sync even during the vertical sync interval. The start H T 3.12 µs of the first broad pulse identifies the field sync datum, 0 . O V B MOD 12.5T PULSE 1/4” Phone – A connector used in audio production that is characterized -0.5 by its single shaft with locking tip.