Conic Sections Beyond R2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Study of Dandelin Spheres: a Second Year Investigation
CALIFORNIA STATE SCIENCE FAIR 2009 PROJECT SUMMARY Name(s) Project Number Sundeep Bekal S1602 Project Title A Study of Dandelin Spheres: A Second Year Investigation Abstract Objectives/Goals The purpose of this investigation is to see if there is a relationship that forms between the radius of the smaller dandelin sphere to the tangent of the angle RLM and distances that form inside the ellipse. Methods/Materials I investigated a conic section of an ellipse that contained two Dandelin Spheres to determine if there was such a relationship. I used the same program as last year, Geometer's Sketchpad, to generate measurements of last year's 2D model of the conic section so that I could better investigate the relationship. After slicing the spheres along the central pole, I looked to see if there were any patterns or relationships. To do this I set the radius of the smaller circle (sphere in 3-D) to 1.09 cm. I changed the radius by .05 cm every time while also noting how the other segments changed or did not change. Materials -Geometer's Sketchpad -Calculator -Computer -Paper -Pencil Results After looking through the data tables I noticed that the radius had the same exact values as (a+c)(tan(1/2) angleRLM), where (a+c) is the distance located in the ellipse. I also noticed that the ratio of the (radius)/(a+c) had the same values as tan((1/2 angleRLM)). I figured that this would be true because the tan (theta)=(opposite)/(adjacent) which in this case, would be tan ((1/2 angleRLM)) = (radius)/(a+c). -

Chapter 11. Three Dimensional Analytic Geometry and Vectors
Chapter 11. Three dimensional analytic geometry and vectors. Section 11.5 Quadric surfaces. Curves in R2 : x2 y2 ellipse + =1 a2 b2 x2 y2 hyperbola − =1 a2 b2 parabola y = ax2 or x = by2 A quadric surface is the graph of a second degree equation in three variables. The most general such equation is Ax2 + By2 + Cz2 + Dxy + Exz + F yz + Gx + Hy + Iz + J =0, where A, B, C, ..., J are constants. By translation and rotation the equation can be brought into one of two standard forms Ax2 + By2 + Cz2 + J =0 or Ax2 + By2 + Iz =0 In order to sketch the graph of a quadric surface, it is useful to determine the curves of intersection of the surface with planes parallel to the coordinate planes. These curves are called traces of the surface. Ellipsoids The quadric surface with equation x2 y2 z2 + + =1 a2 b2 c2 is called an ellipsoid because all of its traces are ellipses. 2 1 x y 3 2 1 z ±1 ±2 ±3 ±1 ±2 The six intercepts of the ellipsoid are (±a, 0, 0), (0, ±b, 0), and (0, 0, ±c) and the ellipsoid lies in the box |x| ≤ a, |y| ≤ b, |z| ≤ c Since the ellipsoid involves only even powers of x, y, and z, the ellipsoid is symmetric with respect to each coordinate plane. Example 1. Find the traces of the surface 4x2 +9y2 + 36z2 = 36 1 in the planes x = k, y = k, and z = k. Identify the surface and sketch it. Hyperboloids Hyperboloid of one sheet. The quadric surface with equations x2 y2 z2 1. -

Bézout's Theorem
Bézout's theorem Toni Annala Contents 1 Introduction 2 2 Bézout's theorem 4 2.1 Ane plane curves . .4 2.2 Projective plane curves . .6 2.3 An elementary proof for the upper bound . 10 2.4 Intersection numbers . 12 2.5 Proof of Bézout's theorem . 16 3 Intersections in Pn 20 3.1 The Hilbert series and the Hilbert polynomial . 20 3.2 A brief overview of the modern theory . 24 3.3 Intersections of hypersurfaces in Pn ...................... 26 3.4 Intersections of subvarieties in Pn ....................... 32 3.5 Serre's Tor-formula . 36 4 Appendix 42 4.1 Homogeneous Noether normalization . 42 4.2 Primes associated to a graded module . 43 1 Chapter 1 Introduction The topic of this thesis is Bézout's theorem. The classical version considers the number of points in the intersection of two algebraic plane curves. It states that if we have two algebraic plane curves, dened over an algebraically closed eld and cut out by multi- variate polynomials of degrees n and m, then the number of points where these curves intersect is exactly nm if we count multiple intersections and intersections at innity. In Chapter 2 we dene the necessary terminology to state this theorem rigorously, give an elementary proof for the upper bound using resultants, and later prove the full Bézout's theorem. A very modest background should suce for understanding this chapter, for example the course Algebra II given at the University of Helsinki should cover most, if not all, of the prerequisites. In Chapter 3, we generalize Bézout's theorem to higher dimensional projective spaces. -

Pencils of Quadrics
Europ. J. Combinatorics (1988) 9, 255-270 Intersections in Projective Space II: Pencils of Quadrics A. A. BRUEN AND J. w. P. HIRSCHFELD A complete classification is given of pencils of quadrics in projective space of three dimensions over a finite field, where each pencil contains at least one non-singular quadric and where the base curve is not absolutely irreducible. This leads to interesting configurations in the space such as partitions by elliptic quadrics and by lines. 1. INTRODUCTION A pencil of quadrics in PG(3, q) is non-singular if it contains at least one non-singular quadric. The base of a pencil is a quartic curve and is reducible if over some extension of GF(q) it splits into more than one component: four lines, two lines and a conic, two conics, or a line and a twisted cubic. In order to contain no points or to contain some line over GF(q), the base is necessarily reducible. In the main part of this paper a classification is given of non-singular pencils ofquadrics in L = PG(3, q) with a reducible base. This leads to geometrically interesting configur ations obtained from elliptic and hyperbolic quadrics, such as spreads and partitions of L. The remaining part of the paper deals with the case when the base is not reducible and is therefore a rational or elliptic quartic. The number of points in the elliptic case is then governed by the Hasse formula. However, we are able to derive an interesting combi natorial relationship, valid also in higher dimensions, between the number of points in the base curve and the number in the base curve of a dual pencil. -

Chapter 1 Geometry of Plane Curves
Chapter 1 Geometry of Plane Curves Definition 1 A (parametrized) curve in Rn is a piece-wise differentiable func- tion α :(a, b) Rn. If I is any other subset of R, α : I Rn is a curve provided that α→extends to a piece-wise differentiable function→ on some open interval (a, b) I. The trace of a curve α is the set of points α ((a, b)) Rn. ⊃ ⊂ AsubsetS Rn is parametrized by α if and only if there exists set I R ⊂ ⊆ such that α : I Rn is a curve for which α (I)=S. A one-to-one parame- trization α assigns→ and orientation toacurveC thought of as the direction of increasing parameter, i.e., if s<t,the direction of increasing parameter runs from α (s) to α (t) . AsubsetS Rn may be parametrized in many ways. ⊂ Example 2 Consider the circle C : x2 + y2 =1and let ω>0. The curve 2π α : 0, R2 given by ω → ¡ ¤ α(t)=(cosωt, sin ωt) . is a parametrization of C for each choice of ω R. Recall that the velocity and acceleration are respectively given by ∈ α0 (t)=( ω sin ωt, ω cos ωt) − and α00 (t)= ω2 cos 2πωt, ω2 sin 2πωt = ω2α(t). − − − The speed is given by ¡ ¢ 2 2 v(t)= α0(t) = ( ω sin ωt) +(ω cos ωt) = ω. (1.1) k k − q 1 2 CHAPTER 1. GEOMETRY OF PLANE CURVES The various parametrizations obtained by varying ω change the velocity, ac- 2π celeration and speed but have the same trace, i.e., α 0, ω = C for each ω. -
Stereoscopic Model for Four Dimensions
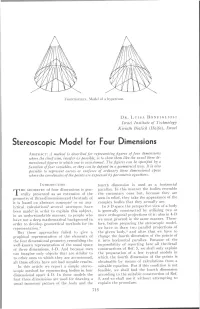
FRONTISPIECIC. Model of a hypercone. DR. LUISA BONFIGLIOLI Israel Institute of Technology K iriath Biahck (Haifa), Israel Stereoscopic Model for Four Dimensions ABSTRACT: A method is described for representing figures of four dimensions where the chief aim, insofar as possible, is to show them like the usual three di mensional figures to which one is accustomed. The figures can be specified by a function offour variables, or they can be defined in a geometrical way. It is also possible to represent curves or surfaces of ordinary three dimensional space where the coordinates of the points are expressed by parametric equ.ations. INTRODUCTION fourth dimension is used as a horizontal HE GEOMETRY of four dimensions is gen parallax. In this manner the bodies resemble T erally presented as an extension of the the customary ones bu t, because they are geometry of three dimensions and the study of seen in relief, they take the appearance of the it is based on abstract conceptsl or on ana complex bodies that they actually are. lytical calculations2 several attempts have In 3-D space the perspective view of a body been made3 in order to explain this subject, is generally constructed by utilizing two or in an understandable manner, to people who more orthogonal projections of it: also in 4-D have not a deep mathematical background in we must proceed in the same manner. There order to develop geometrical methods for its fore, before preparing the steroscopic model, representation 4 we have to draw two parallel projections of But these approaches failed to give a the given body,5 and after that we have to graphical representation of the elements of change the fourth dimension of the points of the four dimensional geometry resembling the it into horizontal parallax. -

A Brief Tour of Vector Calculus
A BRIEF TOUR OF VECTOR CALCULUS A. HAVENS Contents 0 Prelude ii 1 Directional Derivatives, the Gradient and the Del Operator 1 1.1 Conceptual Review: Directional Derivatives and the Gradient........... 1 1.2 The Gradient as a Vector Field............................ 5 1.3 The Gradient Flow and Critical Points ....................... 10 1.4 The Del Operator and the Gradient in Other Coordinates*............ 17 1.5 Problems........................................ 21 2 Vector Fields in Low Dimensions 26 2 3 2.1 General Vector Fields in Domains of R and R . 26 2.2 Flows and Integral Curves .............................. 31 2.3 Conservative Vector Fields and Potentials...................... 32 2.4 Vector Fields from Frames*.............................. 37 2.5 Divergence, Curl, Jacobians, and the Laplacian................... 41 2.6 Parametrized Surfaces and Coordinate Vector Fields*............... 48 2.7 Tangent Vectors, Normal Vectors, and Orientations*................ 52 2.8 Problems........................................ 58 3 Line Integrals 66 3.1 Defining Scalar Line Integrals............................. 66 3.2 Line Integrals in Vector Fields ............................ 75 3.3 Work in a Force Field................................. 78 3.4 The Fundamental Theorem of Line Integrals .................... 79 3.5 Motion in Conservative Force Fields Conserves Energy .............. 81 3.6 Path Independence and Corollaries of the Fundamental Theorem......... 82 3.7 Green's Theorem.................................... 84 3.8 Problems........................................ 89 4 Surface Integrals, Flux, and Fundamental Theorems 93 4.1 Surface Integrals of Scalar Fields........................... 93 4.2 Flux........................................... 96 4.3 The Gradient, Divergence, and Curl Operators Via Limits* . 103 4.4 The Stokes-Kelvin Theorem..............................108 4.5 The Divergence Theorem ...............................112 4.6 Problems........................................114 List of Figures 117 i 11/14/19 Multivariate Calculus: Vector Calculus Havens 0. -

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -

Polynomial Curves and Surfaces
Polynomial Curves and Surfaces Chandrajit Bajaj and Andrew Gillette September 8, 2010 Contents 1 What is an Algebraic Curve or Surface? 2 1.1 Algebraic Curves . .3 1.2 Algebraic Surfaces . .3 2 Singularities and Extreme Points 4 2.1 Singularities and Genus . .4 2.2 Parameterizing with a Pencil of Lines . .6 2.3 Parameterizing with a Pencil of Curves . .7 2.4 Algebraic Space Curves . .8 2.5 Faithful Parameterizations . .9 3 Triangulation and Display 10 4 Polynomial and Power Basis 10 5 Power Series and Puiseux Expansions 11 5.1 Weierstrass Factorization . 11 5.2 Hensel Lifting . 11 6 Derivatives, Tangents, Curvatures 12 6.1 Curvature Computations . 12 6.1.1 Curvature Formulas . 12 6.1.2 Derivation . 13 7 Converting Between Implicit and Parametric Forms 20 7.1 Parameterization of Curves . 21 7.1.1 Parameterizing with lines . 24 7.1.2 Parameterizing with Higher Degree Curves . 26 7.1.3 Parameterization of conic, cubic plane curves . 30 7.2 Parameterization of Algebraic Space Curves . 30 7.3 Automatic Parametrization of Degree 2 Curves and Surfaces . 33 7.3.1 Conics . 34 7.3.2 Rational Fields . 36 7.4 Automatic Parametrization of Degree 3 Curves and Surfaces . 37 7.4.1 Cubics . 38 7.4.2 Cubicoids . 40 7.5 Parameterizations of Real Cubic Surfaces . 42 7.5.1 Real and Rational Points on Cubic Surfaces . 44 7.5.2 Algebraic Reduction . 45 1 7.5.3 Parameterizations without Real Skew Lines . 49 7.5.4 Classification and Straight Lines from Parametric Equations . 52 7.5.5 Parameterization of general algebraic plane curves by A-splines . -

Section 6.2 Introduction to Conics: Parabolas 103
Section 6.2 Introduction to Conics: Parabolas 103 Course Number Section 6.2 Introduction to Conics: Parabolas Instructor Objective: In this lesson you learned how to write the standard form of the equation of a parabola. Date Important Vocabulary Define each term or concept. Directrix A fixed line in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed point in the plane. Focus A fixed point in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed line in the plane. Focal chord A line segment that passes through the focus of a parabola and has endpoints on the parabola. Latus rectum The specific focal chord perpendicular to the axis of a parabola. Tangent A line is tangent to a parabola at a point on the parabola if the line intersects, but does not cross, the parabola at the point. I. Conics (Page 433) What you should learn How to recognize a conic A conic section, or conic, is . the intersection of a plane as the intersection of a and a double-napped cone. plane and a double- napped cone Name the four basic conic sections: circle, ellipse, parabola, and hyperbola. In the formation of the four basic conics, the intersecting plane does not pass through the vertex of the cone. When the plane does pass through the vertex, the resulting figure is a(n) degenerate conic , such as . a point, a line, or a pair of intersecting lines. -

Smooth Curve Interpolation with Generalized Conics R
Computers Math. Applic. Vol. 31, No. 7, pp. 37-64, 1996 Pergamon CopyrightQ1996 Elsevier Science Ltd Printed in Great Britain. All rights reserved 0898-1221/96 $15.00 + 0.00 S0898-1221(96)00017-X Smooth Curve Interpolation with Generalized Conics R. Qu Department of Mathematics, National University of Singapore Singapore 119260 matqurb~nus, sg (Received May 1995; accepted June 1995) Abstract--Efficient algorithms for shape preserving approximation to curves and surfaces are very important in shape design and modelling in CAD/CAM systems. In this paper, a local algorithm using piecewise generalized conic segments is proposed for shape preserving curve interpolation. It is proved that there exists a smooth piecewise generalized conic curve which not only interpolates the data points, but also preserves the convexity of the data. Furthermore, if the data is strictly convex, then the interpolant could be a locally adjustable GC 2 curve provided the curvatures at the data points are well determined. It is also shown that the best approximation order is (..9(h6). An efficient algorithm for the simultaneous computation of points on the curve is derived so that the curve can be easily computed and displayed. The numerical complexity of the algorithm for computing N points on the curve is about 2N multiplications and N additions. Finally, some numerical examples with graphs are provided and comparisons with both quadratic and cubic spline interpolants are also given. Zeywords--Generalized conics, Splines, Parametric curve, Recursive algorithm, Subdivision, In- terpolation, Difference algorithm. 1. INTRODUCTION High accuracy curve interpolation and approximation in both theory and applications using a variety of methods have been studied intensively in the approximation literature (cf. -

Construction of Rational Surfaces of Degree 12 in Projective Fourspace
Construction of Rational Surfaces of Degree 12 in Projective Fourspace Hirotachi Abo Abstract The aim of this paper is to present two different constructions of smooth rational surfaces in projective fourspace with degree 12 and sectional genus 13. In particular, we establish the existences of five different families of smooth rational surfaces in projective fourspace with the prescribed invariants. 1 Introduction Hartshone conjectured that only finitely many components of the Hilbert scheme of surfaces in P4 contain smooth rational surfaces. In 1989, this conjecture was positively solved by Ellingsrud and Peskine [7]. The exact bound for the degree is, however, still open, and hence the question concerning the exact bound motivates us to find smooth rational surfaces in P4. The goal of this paper is to construct five different families of smooth rational surfaces in P4 with degree 12 and sectional genus 13. The rational surfaces in P4 were previously known up to degree 11. In this paper, we present two different constructions of smooth rational surfaces in P4 with the given invariants. Both the constructions are based on the technique of “Beilinson monad”. Let V be a finite-dimensional vector space over a field K and let W be its dual space. The basic idea behind a Beilinson monad is to represent a given coherent sheaf on P(W ) as a homology of a finite complex whose objects are direct sums of bundles of differentials. The differentials in the monad are given by homogeneous matrices over an exterior algebra E = V V . To construct a Beilinson monad for a given coherent sheaf, we typically take the following steps: Determine the type of the Beilinson monad, that is, determine each object, and then find differentials in the monad.