Dynamic Force on an Elbow Caused by a Traveling Liquid Slug
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
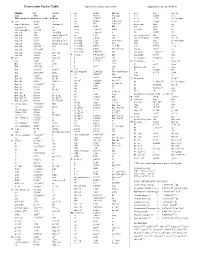
Conversion Factor Table Copyright © by Jon Wittwer
Conversion Factor Table http://www.et.byu.edu/~jww8 Copyright © by Jon Wittwer Multiple by To Get hp 2544.5 Btu / hr m / s 3.60 km / h inch 2.54 cm hp 745.70 W (watt) m / s 3.2808 ft / s This can also be written as: 1 inch = 2.54 cm hp 0.74570 kW m / s 2.237 mi / h (mph) A acre 43,560 ft2 hp 33,000 ft·lbf / min m / s2 3.2808 ft / s2 ampere·hr (A·h) 3,600 coulomb (C) hp 550 ft·lbf / sec metric ton 1000 kg hp·hr 2544 Btu ångström (Å) 1x10-10 m mil 0.001 in 6 atm (atmosphere) 1.01325 bar hp·hr 1.98x10 ft·lbf mi (mile) 5280 ft atm, std 76.0 cm of Hg hp·hr 2.68x106 J mi 1.6093 km atm, std 760 mm of Hg at 0ºC in 2.54* cm mi2 (square mile) 640 acres atm, std 33.90 ft of water in of Hg 0.0334 atm mph (mile/hour) 1.6093 km / hr atm, std 29.92 in of Hg at 30ºF in of Hg 13.60 in of water mph 88.0 ft / min (fpm) atm, std 14.696 lbf/in2 abs (psia) in of Hg 3.387 kPa mph 1.467 ft / s atm, std 101.325 kPa in of water 0.0736 in of Hg mph 0.4470 m / s 2 -6 atm, std 1.013x105 Pa in of water 0.0361 lbf / in (psi) micron 1x10 m in of water 0.002458 atm -3 atm, std 1.03323 kgf / cm2 mm of Hg 1.316x10 atm -4 atm, std 14.696 psia J J (joule) 9.4782x10 Btu mm of Hg 0.1333 kPa B bar 0.9869 atm, std J 6.2415x1018 eV mm of water 9.678x10-5 atm bar 1x105 Pa J 0.73756 ft·lbf N N (newton) 1 kg·m / s2 J1N·m Btu 778.169 ft·lbf N 1x105 dyne 7 Btu 1055.056 J J 1x10 ergs µN (microN) 0.1 dyne Btu 5.40395 psia·ft3 J / s 1 W N 0.22481 lbf K kg (kilogram) 2.2046226 lbm (pound mass) Btu 2.928x10-4 kWh N·m 0.7376 ft·lbf -5 kg 0.068522 slug N·m 1 J Btu 1x10 therm -3 kg 1x10 metric -

Fluid Mechanics
I. FLUID MECHANICS I.1 Basic Concepts & Definitions: Fluid Mechanics - Study of fluids at rest, in motion, and the effects of fluids on boundaries. Note: This definition outlines the key topics in the study of fluids: (1) fluid statics (fluids at rest), (2) momentum and energy analyses (fluids in motion), and (3) viscous effects and all sections considering pressure forces (effects of fluids on boundaries). Fluid - A substance which moves and deforms continuously as a result of an applied shear stress. The definition also clearly shows that viscous effects are not considered in the study of fluid statics. Two important properties in the study of fluid mechanics are: Pressure and Velocity These are defined as follows: Pressure - The normal stress on any plane through a fluid element at rest. Key Point: The direction of pressure forces will always be perpendicular to the surface of interest. Velocity - The rate of change of position at a point in a flow field. It is used not only to specify flow field characteristics but also to specify flow rate, momentum, and viscous effects for a fluid in motion. I-1 I.4 Dimensions and Units This text will use both the International System of Units (S.I.) and British Gravitational System (B.G.). A key feature of both is that neither system uses gc. Rather, in both systems the combination of units for mass * acceleration yields the unit of force, i.e. Newton’s second law yields 2 2 S.I. - 1 Newton (N) = 1 kg m/s B.G. - 1 lbf = 1 slug ft/s This will be particularly useful in the following: Concept Expression Units momentum m! V kg/s * m/s = kg m/s2 = N slug/s * ft/s = slug ft/s2 = lbf manometry ρ g h kg/m3*m/s2*m = (kg m/s2)/ m2 =N/m2 slug/ft3*ft/s2*ft = (slug ft/s2)/ft2 = lbf/ft2 dynamic viscosity µ N s /m2 = (kg m/s2) s /m2 = kg/m s lbf s /ft2 = (slug ft/s2) s /ft2 = slug/ft s Key Point: In the B.G. -

Foot–Pound–Second System
Foot–pound–second system The foot–pound–second system or FPS system is a system of units built on three fundamental units: the foot for length, the (avoirdupois) pound for either mass or force (see below), and the second for time.[1] Contents Variants Pound as mass unit Pound-force as force unit Pound as force unit Other units Molar units Electromagnetic units Units of light Conversions See also References Variants Collectively, the variants of the FPS system were the most common system in technical publications in English until the middle of the 20th century.[1] Errors can be avoided and translation between the systems facilitated by labelling all physical quantities consistently with their units. Especially in the context of the FPS system this is sometimes known as the Stroud system after William Stroud, who popularized it.[2] Three approaches to English units of mass and force or weight[3][4] Base Force Weight Mass 2nd law of m = F F = W⋅a motion a g F = m⋅a System British Gravitational (BG) English Engineering (EE) Absolute English (AE) Acceleration ft/s2 ft/s2 ft/s2 (a) Mass (m) slug pound-mass pound Force (F), pound pound-force poundal weight (W) Pressure (p) pound per square inch pound-force per square inch poundal per square foot Pound as mass unit When the pound is used as a unit of mass, the core of the coherent system is similar and functionally equivalent to the corresponding subsets of the International System of Units (SI), using metre, kilogram and second (MKS), and the earlier centimetre–gram–second system of units (CGS). -

The International System of Units (SI) - Conversion Factors For
NIST Special Publication 1038 The International System of Units (SI) – Conversion Factors for General Use Kenneth Butcher Linda Crown Elizabeth J. Gentry Weights and Measures Division Technology Services NIST Special Publication 1038 The International System of Units (SI) - Conversion Factors for General Use Editors: Kenneth S. Butcher Linda D. Crown Elizabeth J. Gentry Weights and Measures Division Carol Hockert, Chief Weights and Measures Division Technology Services National Institute of Standards and Technology May 2006 U.S. Department of Commerce Carlo M. Gutierrez, Secretary Technology Administration Robert Cresanti, Under Secretary of Commerce for Technology National Institute of Standards and Technology William Jeffrey, Director Certain commercial entities, equipment, or materials may be identified in this document in order to describe an experimental procedure or concept adequately. Such identification is not intended to imply recommendation or endorsement by the National Institute of Standards and Technology, nor is it intended to imply that the entities, materials, or equipment are necessarily the best available for the purpose. National Institute of Standards and Technology Special Publications 1038 Natl. Inst. Stand. Technol. Spec. Pub. 1038, 24 pages (May 2006) Available through NIST Weights and Measures Division STOP 2600 Gaithersburg, MD 20899-2600 Phone: (301) 975-4004 — Fax: (301) 926-0647 Internet: www.nist.gov/owm or www.nist.gov/metric TABLE OF CONTENTS FOREWORD.................................................................................................................................................................v -

Introduction to Mechanical Engineering Measurements Author: John M
Introduction, Page 1 Introduction to Mechanical Engineering Measurements Author: John M. Cimbala, Penn State University Latest revision, 19 August 2011 Two Main Purposes of Measurements Engineering experimentation - This is where we seek new information, and is generally done when developing a new product. Some example questions which may be asked by the engineer are: How hot does it get? How fast does it go? Operational systems - This is where we monitor and control processes, generally on existing equipment rather than in the design of new products. For example, consider the heating and/or air conditioning control system in a room. The system measures the temperature, and then controls the heating or cooling equipment. Dimensions and Units Primary (or Basic) Dimensions There are seven primary dimensions (also called basic dimensions). All other dimensions can be formed by combinations of these. The primary dimensions are: mass, length, time, temperature, current, amount of light, and amount of matter. Unit Systems Unit systems were invented so that numbers could be assigned to the dimensions. o There are three primary unit systems in use today: . the International System of Units (SI units, from Le Systeme International d’Unites, more commonly simply called the metric system of units) . the English Engineering System of Units (commonly called English system of units) . the British Gravitational System of Units (BG) o The latter two are similar, except for the choice of primary mass unit and use of the degree symbol. The two dominant unit systems in use in the world today are the metric system (SI) and the English system. -

Conversion of Units Some Problems in Engineering Mechanics May Involve Units That Are Not in the International System of Units (SI)
Mechanics 1.3. Conversion of Units Some problems in engineering mechanics may involve units that are not in the International System of Units (SI). In such cases, it may be necessary to convert from one system to another. In other cases the units being used may be within the same system but have a different prefix. This leaflet illustrates examples of both types of conversions. Converting from one system of units to another In the U.S. Customary system of units (FPS) length is measured in feet (ft), force in pounds (lb), and time in seconds (s). The unit of mass, referred to as a slug, is therefore equal to the amount of − matter accelerated at 1 ft s 2, when acted up on by a force of 1 lb (derived from Newton’s second law of Motion F = ma — see mechanics sheet 2.2) this gives that 1 slug = 1 lb ft−1 s2. Table 1 provides some direct conversions factors between FPS and SI units. Quantity FPS Unit of measurement SI Unit of measurement Force lb = 4.4482 N Mass slug = 14.5938 kg Length ft =0.3048m Table 1: Conversion factors Converting from one metric unit to another metric unit If you are converting large units to smaller units, i.e. converting metres to centimetres, you will need to MULTIPLY by a conversion factor. For example, to find the number of centimetres in 523 m, you will need to MULTIPLY 523 by 100. Thus, 523 m = 52 300 cm. If you are converting small units to larger units, i.e. -
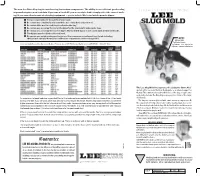
Guarantee SLUG MOLD
The new Lee Drive Key slug is a modern slug for modern components. The ability to use efficient, good sealing COMPLETE INSTRUCTIONS trap wads requires new load data. If you own a Load-All, you are ready to load—simply select the correct bush- ing. If you own other brands of reloading equipment — you’re in luck. We’ve included a powder dipper. * You are responsible for the safety of your loads. * Be certain you completely understand the use of this data and your tool. SLUG MOLD * Be certain filler wad (if used) is placed under the slug. * Be certain you are using the correct bushing for the slug weight and powder type. * Be certain you are using the correct dipper. The included dipper is not usable with all the listed loads. * The dipper must be filled and struck level. * Be certain you weigh maximum charges and the components used exactly as listed, including shell, primer and wad brand. If you substitute components, reduce charge 10%. NEW! Always tight left-hand screw If you can’t find filler wads locally, contact Ballistic Products, Inc., 20015 75th Avenue North, Corcoran MN 55340 1-888-273-5623 To loosen, turn clockwise. Tighten— counter-clockwise. The Lee Slug Mold incorporates the exclusive “Drive Key” (patent rights reserved). The Drive Key doubles as an internal support for the wad. This eliminates the need to fill the base of the slug or require nitro cards in the shot cup. The Drive Key assures positive rotation of the slug in An assortment of good load data is provided. -

A Comparison Between Two Simple Models of a Slug Flow in a Long Flexible Marine Riser
A COMPARISON BETWEEN TWO SIMPLE MODELS OF A SLUG FLOW IN A LONG FLEXIBLE MARINE RISER A. Pollio1, M. Mossa2 1 Corresponding author, PhD, grant recipient, Technical University of Bari, Department of Water Engineering and Chemistry, Via E. Orabona 4, 70125 Bari, Italy, e-mail: [email protected], fax: +39 080 596 3414. 2 Professor, PhD, IAHR member, ASCE member, Technical University of Bari, Department of Environmental Engineering and Sustainable Development, Via E. Orabona 4, 70125 Bari, Italy, e-mail: [email protected], fax: +39 080 596 3414. ABSTRACT Slug flows are extremely interesting multiphase regime phenomena which frequently occur in flexible marine risers used by the petroleum industry in offshore environments and have both a liquid and gaseous phase. Generally, the gaseous phase is pumped in together with the liquid phase to facilitate the suction of the latter. Literature and experimental observations show a wide range of multiphase regimes which are the result of numerous parameters such as liquid and gaseous discharge, the pipe diameter and its inclination. This paper describes two simple models of the slug flow regime by means of an equivalent monophase flow with a non-constant density. The slug regime is modelled as a monophase density-varying flow with a sinusoidal density, travelling along the pipe itself towards the top end node of the riser. Starting from the bottom end, it is characterized by adiabatic processes and energy loss along the entire length of the pipe. In the first model, the slug wavelength is supposed to be independent of the riser inclination, while in the second one a simple linear relationship between the slug wavelength and the pipe inclination was imposed. -
Unit Systems
Unit Systems To measure the magnitudes of quantities measurement units are defined Engineers specify quantities in two different system of units: The International System of Units ( Systeme International d’Unites –SI) The United States Customary System, USCS) UNITS Base Units Derived Units 3/13/2020 1 BASE UNITS • A base unit is the unit of a fundamental quantity. Base units are independent of one another and they form the core of unit system. They are defined by detailed international agreements. Base Quantity (common symbol) SI Base Unit Abbreviation Length (l, x, d, h etc.) Meter m Mass (m) Kilogram kg Time (t) Second s Temperature (T) Kelvin K Electric Current (i ) Ampere A Amount of substance (n) Mole mol Luminous intensity (I) Candela cd 3/13/2020 2 United States Customary System of Units, USCS • The USCS was originally used in Great Britain, but it is today primarily used in the US. Why does the US stand out against SI? The reasons are complex and involve economics, logistics and culture. • One of the major distinctions between the SI and USCS is that mass is a base quantity in the SI, whereas force is a base quantity in the USCS. Unit of force in USCS is ‘ pound-force’ with the abbreviation lbf. It is common to use the shorter terminology ‘pound’ and the abbreviation lb. • Another distinction is that the USCS employs two different dimensions for mass; pound-mass, lbm and the slug (no abbreviation for the slug) (for calculations involving motion, gravitation, momentum, kinetic energy and acceleration the slug is preferred unit. -

Shotshell Science Resources to Choose the Right Load
SHOTSHELL GUIDE SHOTSHELL SHOTSHELL SCIENCE RESOURCES TO CHOOSE THE RIGHT LOAD Breaking clay targets, wingshooting gamebirds, launching slugs at big game, protecting your home—there’s almost no limit to what a shotgun paired with the right ammunition can do. But to maximize the platform’s potential, you need to choose the load that best fits the application. Use the resources here to make the right call no matter what your pursuit might be. SHOT SIZE AVERAGE PELLET COUNT — STEEL SHOT AVERAGE PELLET COUNT — LEAD SHOT REFERENCE CHART Payload Weight Payload Weight Shot 3/4 7/8 15/16 1 1 1/8 1 1/4 1 3/8 1 1/2 1 9/16 1 5/8 Shot 1/2 11/16 3/4 7/8 1 1 1/8 1 1/4 1 5/16 1 3/8 1 1/2 1 5/8 1 7/8 2 2 1/4 PELLET T BBB BB 1 2 3 4 5 6 7 7½ 8 8½ 9 Size (21.25) (24.81) (26.58) (28.35) (31.89) (35.44) (39.98) (42.52) (44.30) (46.06) Size (14.17) (19.49) (21.25) (24.80) (28.35) (31.89) (35.44) (37.21) (38.98) (42.52) (46.06) (53.15) (56.70) (63.78) DIAMETER INCHES .20 .19 .18 .16 .15 .14 .13 .12 .11 .10 .095 .09 .085 .08 7 316 - 395 422 475 527 580 633 659 685 9 292 402 439 512 585 658 731 767 804 877 951 1097 1170 1316 DIAMETER MM 5.08 4.83 4.57 4.06 3.81 3.56 3.30 3.05 2.79 2.54 2.41 2.29 2.16 2.03 6 236 - 295 315 354 394 433 472 492 512 8-1/2 249 342 373 435 497 559 621 652 683 745 808 932 994 1118 5 182 - 228 243 273 304 334 364 380 395 8 205 282 307 359 410 461 512 538 564 615 666 769 820 922 4 144 168 180 192 216 240 264 288 300 312 7-1/2 175 241 262 306 350 394 437 459 481 525 569 656 700 787 GAME GUIDE 3 118 136 143 158 178 197 217 237 247 257 6 -

Slug & Snail Traps Slug Saloon Stop Slugs! Snailer Stop Slugs & Snails!
Slug & Snail Traps P.O. Box 1555, Ventura, CA 93002 800-248-2847 * 805-643-5407 * fax 805-643-6267 e-mail [email protected] web www.rinconvitova.com Slug Saloon Stop Slugs! Safe, Effective, Food Grade Bait, Child & Pet Safe Mix nontoxic malted barley bait in the Slug Saloon. Draw lots of slugs into the saloon where they drown in the brew. Use one trap (place on the ground or sink it down) for every 10 sq. ft of infested garden area and visit the Saloon every 3-4 days to empty the tray. Each trap comes with enough bait for one month. Replacement bait enough for 3 months. Made of tough, weather resistant polyethylene for years of service. Bulk packages available for farms. Slug Saloon - each with 1 month supply of bait, Use Instructions measuring spoon, and easy to follow instructions. 1. Remove the Slug Saloon lid. 2. Place the Saloon in area of heaviest slug infestation. The Slug 3 Month Bait Refills – each with bait, measuring spoon, Saloon may be placed on top of the soil or pushed into the soil instructions to the lip of the tray. Bulk Pack – 10 Slug Saloons, with 3 pound bait, 6 3. Measure three (1) spoon full of the Slug Saloon safe, non-toxic bait with the free spoon provided (or one (1) teaspoon full) into month supply, enough for a season. the Slug Saloon tray 4. Slowly fill tray with water, stirring to mix thoroughly. 5. Snap Slug Saloon lid onto tray. 6. Check every 2 to 3 days. -
The SI Metric Systeld of Units and SPE METRIC STANDARD
The SI Metric SystelD of Units and SPE METRIC STANDARD Society of Petroleum Engineers The SI Metric System of Units and SPE METRIC STANDARD Society of Petroleum Engineers Adopted for use as a voluntary standard by the SPE Board of Directors, June 1982. Contents Preface . ..... .... ......,. ............. .. .... ........ ... .. ... 2 Part 1: SI - The International System of Units . .. .. .. .. .. .. .. .. ... 2 Introduction. .. .. .. .. .. .. .. .. .. .. .. .. 2 SI Units and Unit Symbols. .. .. .. .. .. .. .. .. .. .. .. 2 Application of the Metric System. .. .. .. .. .. .. .. .. .. .. .. .. 3 Rules for Conversion and Rounding. .. .. .. .. .. .. .. .. .. .. .. .. 5 Special Terms and Quantities Involving Mass and Amount of Substance. .. 7 Mental Guides for Using Metric Units. .. .. .. .. .. .. .. .. .. .. .. .. .. 8 Appendix A (Terminology).. .. .. .. .. .. .. .. .. .. .. .. .. 8 Appendix B (SI Units). .. .. .. .. .. .. .. .. .. .. .. .. 9 Appendix C (Style Guide for Metric Usage) ............ ...... ..... .......... 11 Appendix D (General Conversion Factors) ................... ... ........ .. 14 Appendix E (Tables 1.8 and 1.9) ......................................... 20 Part 2: Discussion of Metric Unit Standards. .. .. .. .. .. .. .. .. 21 Introduction.. .. .. .. .. .. .. .. .. .. .. .. 21 Review of Selected Units. .. .. .. .. .. .. .. .. .. .. 22 Unit Standards Under Discussion ......................................... 24 Notes for Table 2.2 .................................................... 25 Notes for Table 2.3 ...................................................