Automatic Chain Cleaner
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Active Extensional Faults in the Central-Eastern Iberian Chain, Spain
ISSN (print): 1698-6180. ISSN (online): 1886-7995 www.ucm.es/info/estratig/journal.htm Journal of Iberian Geology 38 (1) 2012: 127-144 http://dx.doi.org/10.5209/rev_JIGE.2012.v38.n1.39209 Active extensional faults in the central-eastern Iberian Chain, Spain Fallas activas extensionales en la Cordillera Ibérica centro-oriental J.L. Simón*, L.E. Arlegui, P. Lafuente, C.L. Liesa Dpt. Ciencias de la Tierra, Facultad de Ciencias, Universidad de Zaragoza, c/ Pedro Cerbuna 12, E-50009 Zaragoza, Spain [email protected], [email protected], [email protected], [email protected] *Corresponding author Received: 27/06/2011 / Accepted: 29/02/2012 Abstract Among the conspicuous extensional structures that accommodate the onshore deformation of the Valencia Trough at the central- eastern Iberian Chain, a number of large faults show evidence of activity during Pleistocene times. At the eastern boundary of the Jiloca graben, the Concud fault has moved since mid Pliocene times at an average rate of 0.07-0.08 mm/y, while rates from 0.08 to 0.33 mm/y have been calculated using distinct stratigraphic markers of Middle to Late Pleistocene age. A total of nine paleoseisms associated to this fault have been identified between 74.5 and 15 ka BP, with interseismic periods ranging from 4 to 11 ka, estimated coseismic displacements from 0.6 to 2.7 m, and potential magnitudes close to 6.8. The other master faults of the Jiloca graben (Ca- lamocha and Sierra Palomera faults) have also evidence of Pliocene to Late Pleistocene displacement, with average slip rates of 0.06 and 0.11-0.15 mm/y, respectively. -

Wildland Fire Incident Management Field Guide
A publication of the National Wildfire Coordinating Group Wildland Fire Incident Management Field Guide PMS 210 April 2013 Wildland Fire Incident Management Field Guide April 2013 PMS 210 Sponsored for NWCG publication by the NWCG Operations and Workforce Development Committee. Comments regarding the content of this product should be directed to the Operations and Workforce Development Committee, contact and other information about this committee is located on the NWCG Web site at http://www.nwcg.gov. Questions and comments may also be emailed to [email protected]. This product is available electronically from the NWCG Web site at http://www.nwcg.gov. Previous editions: this product replaces PMS 410-1, Fireline Handbook, NWCG Handbook 3, March 2004. The National Wildfire Coordinating Group (NWCG) has approved the contents of this product for the guidance of its member agencies and is not responsible for the interpretation or use of this information by anyone else. NWCG’s intent is to specifically identify all copyrighted content used in NWCG products. All other NWCG information is in the public domain. Use of public domain information, including copying, is permitted. Use of NWCG information within another document is permitted, if NWCG information is accurately credited to the NWCG. The NWCG logo may not be used except on NWCG-authorized information. “National Wildfire Coordinating Group,” “NWCG,” and the NWCG logo are trademarks of the National Wildfire Coordinating Group. The use of trade, firm, or corporation names or trademarks in this product is for the information and convenience of the reader and does not constitute an endorsement by the National Wildfire Coordinating Group or its member agencies of any product or service to the exclusion of others that may be suitable. -

U.S. Natural Climate Solutions Accelerator Finalist: Forests of the Future: Replanting Burn Scars for Carbon Sequestration and Ecosystem Services
U.S. Natural Climate Solutions Accelerator Finalist: Forests of the Future: Replanting Burn Scars for Carbon Sequestration and Ecosystem Services. Collaboration between Coalitions and Collaboratives, Inc. (COCO) and RenewWest. Forests of the Future initiative aims to reforest post-fire landscapes that are not naturally recovering, and to develop an investable carbon-focused market mechanism and a “carbon reforestation fund” model to bring additional capital for reforestation and carbon sequestration. By quantifying tree growth into a carbon offset equivalent, an additional source of value is created for forest owners, which can be brought for sale to carbon offset buyers in the Western Climate Initiative (WCI) compliance marketplace in California and voluntary carbon markets. Conservation co-benefits include habitat restoration promoting biodiversity, improving soil health and preventing erosion, maintaining watershed health through improved stream clarity and temperature. Economic co-benefits include improving value of degraded lands, re-establishing working lands to sustainable Forest Stewardship Council (FSC) certified wood production, and creating a source of employment for rural communities engaged in a deforestation-free timber supply chain. Investors seeking low-correlated, attractive risk-adjusted prospects, can consider a fund of combined projects, which aims to provide predictable long-term market-rate returns and quantifiable environmental and social impacts. How it works: The pilot project will be implemented in Modoc County, California on an 11,516- acre parcel of land owned by Collins Timber, which is not naturally recovering after it burned in the 2012 Barry Point Fire. Following the 30-year project period, Collins Timber will retain the ability to use the lands for sustainable, mixed-age selective-harvest forestry, certified by FSC. -

MC-10164446-0001.Pdf
ATTENTION: IMPORTANT - All GENERAL MANAGER q Service Personnel PARTS MANAGER q Should Read and Initial in the boxes CLAIMS PERSONNEL q provided, right. SERVICE MANAGER q © 2016 Subaru of America, Inc. All rights reserved. SERVICE BULLETIN APPLICABILITY: 2010-19MY Legacy and Outback NUMBER: 16-103-16R 2014-19MY Forester DATE: 12/14/16 2012-19MY Impreza 2013-19MY Crosstrek REVISED: 08/29/19 2015-19MY WRX 2019-20MY Ascent SUBJECT: Transmission Fluid Seepage INTRODUCTION: This bulletin has been developed in response to a small number of customer concerns regarding fluid seepage found coming from the CVT assembly. Investigation has identified likely sources of the seepage to be the sealant used on the CVT’s oil pump chain cover and the input shaft oil seal. The repair involves chain cover removal, a thorough cleaning and inspection of the sealing surfaces followed by re-sealing the cover and replacement of the input shaft oil seal with the new, redesigned type. PRODUCTION CHANGE INFORMATION: Model Starting VIN The available starting VINS for incorporation of the new input shaft oil Legacy L3002280 seal are supplied to the right. This bulletin will be revised with the VINs Outback L3100230 for the remaining applicable models as they become available. Ascent L3407153 PART INFORMATION: Description Part Number THREE BOND 1215 SOA868V9600 RING SEAL 31377AA510 OIL SEAL 806747030 SERVICE PROCEDURE / INFORMATION: As a first step, during inspection of the customer’s concern, confirm the fluid found to be seeping is CVT fluid (CVTF) and not engine oil. The photos below are examples of where CVTF seepage may be evident. -
ASME/ANSI RS Roller Chain Technical Information
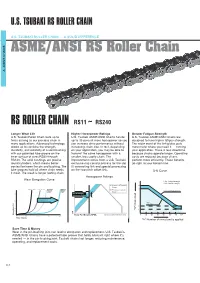
U.S. TSUBAKI RS ROLLER CHAIN U.S. TSUBAKI ROLLER CHAIN — A SOLID DIFFERENCE ASME/ANSI RS Roller Chain A - DRIVE CHAINS RS ROLLER CHAIN RS11 ˜ RS240 Longer Wear Life Higher Horsepower Ratings Greater Fatigue Strength U.S. Tsubaki Roller Chain lasts up to U.S. Tsubaki ASME/ANSI Chains handle U.S. Tsubaki ASME/ANSI Chains are twice as long as our previous chain in up to 33 percent more horsepower so you designed to have higher fatigue strength. many applications. Advanced technology can increase drive performance without The wider waist of the link plates puts allows us to combine the strength, increasing chain size. In fact, depending more metal where you need it — running durability, and reliability of a solid bushing on your application, you may be able to your application. There is less downtime with our patented lube groove on the transmit the same horsepower with a because chains operate longer. Operating inner surface of sizes RS80 through smaller, less costly chain. The costs are reduced because chains RS140. The solid bushings are precise improvement comes from a U.S. Tsubaki perform more efficiently. These benefits round cylinders, which means better exclusive ring coining process for the slip go right to your bottom line. contact between the pin and bushing. The fit connecting link and special processing lube grooves hold oil where chain needs on the two-pitch offset link. S-N Curve it most. The result is longer lasting chain. Horsepower Ratings Wear Elongation Curve A & a: Fatigue strength B & b: Tensile strength Improved Tsubaki B Chain b Competitor A Competitor B Previous Improved Previous Tsubaki Tsubaki Tsubaki Improved Tsubaki Chain Chain Chain Chain 1.5 33% Increase in Horespower Rating 1.0 RS80-RS140 Other roller chain A .05 "S" Chain load a HP HP 2 3 4 5 6 7 Elongation (%) * Ratings are for RS80-RS240 Roller Chains 1 10 10 0 50 100 150 200 Revs Per Minute (RPM) 10 10 10 10 10 Time (Hours) "N" Number of times load is applied Save Time & Money Wear in the pin-bushing joint can lead to elongation and replacement. -
Chapter 1 Introduction
國立交通大學 機械工程研究所 碩士論文 變速自行車鏈條設計 Design of Chains on Multi-speed Bicycles 研究生:張崇銘 指導教授:曾錦煥 教授 中華民國九十三年六月 變速自行車鏈條設計 Design of Chains on Multi-speed Bicycles 研究生:張崇銘 Student: Chung-Ming Chang 指導教授:曾錦煥 Advisor: Ching-Huan Tseng 國立交通大學 機械工程研究所 碩士論文 A Thesis Submitted to Institute of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering June 2004 Hsinchu, Taiwan, Republic of china 中華民國九十三年六月 變速自行車鏈條設計 研究生:張崇銘 指導教授:曾錦煥 國立交通大學機械工程研究所 摘要 本論文主要研究對象為自行車上傳動系統中的鏈條元件,由於自行車飛 輪受到車架、騎乘姿勢所形成的空間限制,必須在有限空間內增加飛輪片 數增加齒數比,達到變速換檔的舒適性。因此,為了配合這樣緊密的飛輪, 鏈條寬度的縮減是必須的。經過專利的整理後,確定空間尺寸和強度為初 步設計的主要需求;提出不同的概念設計,並利用新的鏈條連結機構來達 到鏈條寬度的縮減。 本文提出概念設計較目前市面上自行車最窄的鏈條寬度更窄,強度部份 利用有限元素分析法做定性分析,比較各個設計的相對強度;此外也經由 原型的製作,檢視其機構的問題。 i Design of Chain on Multi-speed Bicycle Student: Chung-Ming Chang Advisor: Ching-Huan Tseng Institute of Mechanical Engineering National Chiao Tung University ABSTRACT This study focuses on the chain for the multi-speed bicycle. Design space for the freewheel on bicycle is limited by frame, riding posture, etc. However, the number of gear ratios in this design space increased with added more sprockets are the trend on the bicycles. Therefore, reduction of chain width is necessary for working with this compact freewheel. Space and strength are main requirements in the beginning of design according to literatures and patents review. Several new concepts are proposed, and these concepts use the linkage mechanism to achieve the reduction of chain width. Chain width of these concepts proposed in this study can be reduced under the assumption for fixed design space and thickness of sprockets. The finite element method is used to compare the trend of strength among these concepts. -

Technical Engineering Guide
TTEECHCHNINICALCAL EN ENGGINEEINEERRININGG 89 www.diamondchain.com TECHNICAL ENGINEERING General Drive Considerations One of the main advantages of the roller chain drive is its ability to perform well under widely varying conditions. Despite this ability, there are a number of rules of good design practice which, if considered early in the design pro- cess, will enable the user to obtain desirable results. Basic dimensions and minimum ultimate tensile requirements for single-pitch, double-pitch and attachment roller chains are specified by various standards organizations worldwide. ASME/ANSI, The American Society of Mechanical Engineers and The American National Standards Institute, defines dimensions such as: pitch, roller width, roller diameter, link plate height, link plate thickness and pin diameter. The primary purpose of the standard is to ensure that manufacturers will produce chains and sub-assemblies that are similar dimensionally and therefore interchangeable. In addition, the standard does offer the user some assurance of quality by defining a minimum ultimate tensile strength for each model of chain. However, tensile strength is not always a valid method to differentiate one manufacturer’s product from another. It is very important to remember that dimensional standardization does not define quality or performance characteristics. Minimum Ultimate Tensile Strength: Minimum Ultimate Tensile Strength, MUTS, is the static load required to break the chain. Tensile strength values shown in this catalog are not allowable working loads. Load or tension applied 1 to the chain in service should never exceed ⁄6 th of the UTS. If exceeding this value is necessary for a specific applica- tion, contact Diamond Chain. -

Ramping up Reforestation in the United States: a Guide for Policymakers March 2021 Cover Photo: CDC Photography / American Forests
Ramping up Reforestation in the United States: A Guide for Policymakers March 2021 Cover photo: CDC Photography / American Forests Executive Summary Ramping Up Reforestation in the United States: A Guide for Policymakers is designed to support the development of reforestation policies and programs. The guide highlights key findings on the state of America’s tree nursery infrastructure and provides a range of strategies for encouraging and enabling nurseries to scale up seedling production. The guide builds on a nationwide reforestation assessment (Fargione et al., 2021) and follow-on assessments (Ramping Up Reforestation in the United States: Regional Summaries companion guide) of seven regions in the contiguous United States (Figure 1). Nursery professionals throughout the country informed our key findings and strategies through a set of structured interviews and a survey. Across the contiguous U.S., there are over 133 million acres of reforestation opportunity on lands that have historically been forested (Cook-Patton et al., 2020). This massive reforestation opportunity equals around 68 billion trees. The majority of opportunities occur on pastureland, including those with poor soils in the Eastern U.S. Additionally, substantial reforestation opportunities in the Western U.S. are driven by large, severe wildfires. Growing awareness of this potential has led governments and organizations to ramp up reforestation to meet ambitious climate and biodiversity goals. Yet, there are many questions about the ability of nurseries to meet the resulting increase in demand for tree seedlings. These include a lack of seed, workforce constraints, and insufficient nursery infrastructure. To meet half of the total reforestation opportunity by 2040 (i.e., 66 million acres) would require America’s nurseries to produce an additional 1.8 billion seedlings each year. -

Quick Guide to Precision Measuring Instruments
E4329 Quick Guide to Precision Measuring Instruments Coordinate Measuring Machines Vision Measuring Systems Form Measurement Optical Measuring Sensor Systems Test Equipment and Seismometers Digital Scale and DRO Systems Small Tool Instruments and Data Management Quick Guide to Precision Measuring Instruments Quick Guide to Precision Measuring Instruments 2 CONTENTS Meaning of Symbols 4 Conformance to CE Marking 5 Micrometers 6 Micrometer Heads 10 Internal Micrometers 14 Calipers 16 Height Gages 18 Dial Indicators/Dial Test Indicators 20 Gauge Blocks 24 Laser Scan Micrometers and Laser Indicators 26 Linear Gages 28 Linear Scales 30 Profile Projectors 32 Microscopes 34 Vision Measuring Machines 36 Surftest (Surface Roughness Testers) 38 Contracer (Contour Measuring Instruments) 40 Roundtest (Roundness Measuring Instruments) 42 Hardness Testing Machines 44 Vibration Measuring Instruments 46 Seismic Observation Equipment 48 Coordinate Measuring Machines 50 3 Quick Guide to Precision Measuring Instruments Quick Guide to Precision Measuring Instruments Meaning of Symbols ABSOLUTE Linear Encoder Mitutoyo's technology has realized the absolute position method (absolute method). With this method, you do not have to reset the system to zero after turning it off and then turning it on. The position information recorded on the scale is read every time. The following three types of absolute encoders are available: electrostatic capacitance model, electromagnetic induction model and model combining the electrostatic capacitance and optical methods. These encoders are widely used in a variety of measuring instruments as the length measuring system that can generate highly reliable measurement data. Advantages: 1. No count error occurs even if you move the slider or spindle extremely rapidly. 2. You do not have to reset the system to zero when turning on the system after turning it off*1. -

Dozer and Tractor Plow Lessons Learned
Issue 13 • 2005 A Lessons Learned Newsletter Published Quarterly Wildland Fire Lessons Learned Center A lesson is truly learned when we modify our behavior to reflect what we now know. Dozer and Tractor Plow Lessons Learned Night line construction on Dido Fire, NV in 1999. Courtesy of Wildlandfire.com Equipment operators from federal, state, county agencies and private contractors were recently interviewed regarding their notable successes, most difficult challenges, effective practices, and most pressing safety issues in dozer and tractor plow operations with respect to Lookouts/Communications/Escape Routes/Safety Zones (LCES) and Situational Aware- ness (SA) . Special thanks are extended to these dozer and tractor plow operators for sharing their important lessons and practices with the wildland fire community. Notable Successes in LCES and SA Customized Dozer Fleet The Florida Division of Forestry employs a fleet of customized dozers built specifically for firefighting. Upgrades from stan- dard industry machines include increased horsepower, faster walking speeds, and climate controlled environmental cabs that incorporate special charcoal filtering to enhance the operator’s air quality. This In This Issue filtering system reduces the fatigue associated with heat and smoke. According to one Florida dozer operator, firefighters stay more focused and mentally sharp Notable Successes / LCES & SA ..... 1 during wildland fire suppression operations. Definitions ......................................... 2 Sticking to the Basics WUI Successes ................................. 3 A dozer operator with 20 years experience with both Federal and County fire Difficult Challenges / LCES & SA ... 3 agencies believes his most notable achievements have come when he sticks to Effective Practices ........................... 4 the basics of LCES. He first anchors his dozer line before moving forward. -
WT Series Actuator Operations Manual WATCH TECHNOLOGIES W T S E R I E S Actuator Operations Manual
Water Control Devices WT Series Actuator Operations Manual WATCH TECHNOLOGIES W T S E R I E S Actuator Operations Manual Watch Technologies 2185 NE Spalding Ave, #10 Grants Pass, OR 97526 Phone 541.472.8095 06/2016 Contents Introduction ………………………………………………............ 1 Theory of Operation ………………………………………. 1 Installation and Start-up ………………………………………… 3 Safety Information ………………………………………… 3 Installation – Rising Stem ………………………………… 4 Installation – Horizontal Gearlift …………………………. 12 Seasonal Start-Up ………………………………………………. 16 Operation ………………………………………………………… 18 Manual Operation ………………………………………… 19 Automated Operation Using Internal RTU ……………… 20 Handwheel Operation …………………………………….. 20 Maintenance and Troubleshooting ……………………………. 21 Troubleshooting Guide …………………………………… 22 Shut-Down and Storage ………………………………………... 23 System Integration and Options ………………………………. 24 Electrical System …………………………………………. 24 Gate Blade Position Sensor ………………………………25 Solar Panel and Charge Controller ……………………... 27 RUG3 Remote Terminal Unit ……………………………. 28 WT Actuator and Gearmotor Specifications ……………29 – 39 Warranty Information …………………………………………… 41 WATER CONTROL DEVICE S Introduction The WT Series of gate control actuators from Watch Technologies have been developed for the ultimate control of a wide variety of applications. he WT Series consists of five distinct models to address the needs of both vertical rising stem gate users as well as systems utilizing T horizontal shaft gear lifts. A wide variety of drive motors enable the WT Series to align with specific torque requirements. The WT Series can also be configured with an embedded Remote Terminal Unit (RTU) which enables the actuator to function as a stand-alone, smart device that can remotely control gates based upon user-defined control points and water status parameters (flow, level). Theory of Operation The philosophy behind each Watch Technologies product is providing long- lived, reliable devices that can be easily installed, maintained, adjusted and upgraded by our customers using simple tools and basic skills. -

Roller Drive Chain Selection and Engineering Information
sec_29.3_29.4_TI 11/19/08 12:45 PM Page 231 Roller Drive Chain Selection 29 Roller Drive Chain Selection and Engineering Information Required information for drive selection: Table 1: Service Factors 1. Type of input power (electric motor, internal combustion Type of Input Power engine, etc.). Internal Internal 2. Type of equipment to be driven. Class of Driven Combustion Combustion Electric Motor 3. Horsepower (HP) to be transmitted. Load Engine with Engine with or Turbine Information Technical Mechanical 4. Full load speed of the fastest running shaft (RPM). Hydraulic Drive Drive 5. Desired speed of the slow-running shaft. NOTE: If the speeds are variable, determine the horsepower to be Uniform 1 1 1.2 transmitted at each speed. Moderate 1.2 1.3 1.4 6. Diameters of the driver and driven shafts. Heavy 1.4 1.5 1.7 7. Center distance of the shafts. NOTE: If this distance is adjustable, determine the Step 3: Calculate the Design Horsepower. amount of adjustment. Design Horsepower = HP x Service Factor 8. Position of drive and space limitations (if any). 9. Conditions of the drive. Drives with more than two The design horsepower equals the horsepower to be sprockets, idlers, or unusual conditions such as severely transmitted times the service factor found in Table 1. abrasive or corrosive environments, severely high or low temperatures, widely fluctuating loads, frequent starts Step 4: Select the Chain Pitch. and stops, etc., require special attention. It is advisable From the Quick Selector Chart on page 234, make a to consult with Renold Jeffrey engineering personnel in tentative chain selection as follows: these situations.