On the Ocean Wave Attenuation Rate in Grease-Pancake Ice, a Comparison of Viscous Layer Propagation Models with Field Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
SAR Image Wave Spectra to Retrieve the Thickness of Grease-Pancake
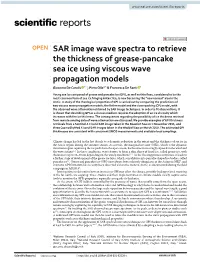
www.nature.com/scientificreports OPEN SAR image wave spectra to retrieve the thickness of grease‑pancake sea ice using viscous wave propagation models Giacomo De Carolis 1*, Piero Olla2,3 & Francesca De Santi 1 Young sea ice composed of grease and pancake ice (GPI), as well as thin foes, considered to be the most common form of sea ice fringing Antarctica, is now becoming the “new normal” also in the Arctic. A study of the rheological properties of GPI is carried out by comparing the predictions of two viscous wave propagation models: the Keller model and the close‑packing (CP) model, with the observed wave attenuation obtained by SAR image techniques. In order to ft observations, it is shown that describing GPI as a viscous medium requires the adoption of an ice viscosity which increases with the ice thickness. The consequences regarding the possibility of ice thickness retrieval from remote sensing data of wave attenuation are discussed. We provide examples of GPI thickness retrievals from a Sentinel‑1 C band SAR image taken in the Beaufort Sea on 1 November 2015, and three CosmoSkyMed X band SAR images taken in the Weddell Sea on March 2019. The estimated GPI thicknesses are consistent with concurrent SMOS measurements and available local samplings. Climate change has led in the last decade to a dramatic reduction in the extent and the thickness of sea ice in the Arctic region during the summer season. As a result, the marginal ice zone (MIZ), which is the dynamic transition region separating the ice pack from the open ocean, has become increasingly exposed to the wind and the wave actions1,2. -

30-2 Lee2.Pdf
OceTHE OFFICIALa MAGAZINEn ogOF THE OCEANOGRAPHYra SOCIETYphy CITATION Lee, C.M., J. Thomson, and the Marginal Ice Zone and Arctic Sea State Teams. 2017. An autonomous approach to observing the seasonal ice zone in the western Arctic. Oceanography 30(2):56–68, https://doi.org/10.5670/oceanog.2017.222. DOI https://doi.org/10.5670/oceanog.2017.222 COPYRIGHT This article has been published in Oceanography, Volume 30, Number 2, a quarterly journal of The Oceanography Society. Copyright 2017 by The Oceanography Society. All rights reserved. USAGE Permission is granted to copy this article for use in teaching and research. Republication, systematic reproduction, or collective redistribution of any portion of this article by photocopy machine, reposting, or other means is permitted only with the approval of The Oceanography Society. Send all correspondence to: [email protected] or The Oceanography Society, PO Box 1931, Rockville, MD 20849-1931, USA. DOWNLOADED FROM HTTP://TOS.ORG/OCEANOGRAPHY SPECIAL ISSUE ON AUTONOMOUS AND LAGRANGIAN PLATFORMS AND SENSORS (ALPS) An Autonomous Approach to Observing the Seasonal Ice Zone in the Western Arctic By Craig M. Lee, Jim Thomson, and the Marginal Ice Zone and Arctic Sea State Teams 56 Oceanography | Vol.30, No.2 ABSTRACT. The Marginal Ice Zone and Arctic Sea State programs examined the MIZ is a region of complex atmosphere- processes that govern evolution of the rapidly changing seasonal ice zone in the Beaufort ice-ocean dynamics that varies with sea Sea. Autonomous platforms operating from the ice and within the water column ice properties and distance from the ice collected measurements across the atmosphere-ice-ocean system and provided the edge (Figure 2; e.g., Morison et al., 1987). -

Drift of Pancake Ice Floes in the Winter Antarctic Marginalicezoneduringpolarcyclones
DRIFT OF PANCAKE ICE FLOES IN THE WINTER ANTARCTIC MARGINAL ICE ZONE DURING POLAR CYCLONES APREPRINT Alberto Alberello∗ Luke Bennetts Petra Heil University of Adelaide University of Adelaide Australian Antarctic Division & ACE–CRC 5005, Adelaide, Australia 5005, Adelaide, Australia 7001, Hobart, Australia Clare Eayrs Marcello Vichi Keith MacHutchon New York University Abu Dhabi University of Cape Town University of Cape Town Abu Dhabi, United Arab Emirates Rondenbosch, 7701, South Africa Rondenbosch, 7701, South Africa Miguel Onorato Alessandro Toffoli Università di Torino & IFNF The University of Melbourne Torino, 10125, Italy 3010, Parkville, Australia June 27, 2019 ABSTRACT High temporal resolution in–situ measurements of pancake ice drift are presented, from a pair of buoys deployed on floes in the Antarctic marginal ice zone during the winter sea ice expansion, over nine days in which the region was impacted by four polar cyclones. Concomitant measurements of wave-in-ice activity from the buoys is used to infer that pancake ice conditions were maintained over at least the first seven days. Analysis of the data shows: (i) unprecedentedly fast drift speeds in the Southern Ocean; (ii) high correlation of drift velocities with the surface wind velocities, indicating absence of internal ice stresses >100 km in from the edge in 100% remotely sensed ice concentration; and (iii) presence of a strong inertial signature with a 13 h period. A Langrangian free drift model is developed, including a term for geostrophic currents that reproduces the 13 h period signature in the ice motion. The calibrated model is shown to provide accurate predictions of the ice drift for up to 2 days, and the calibrated parameters provide estimates of wind and ocean drag for pancake floes under storm conditions. -

The Roland Von Glasow Air-Sea-Ice Chamber (Rvg-ASIC)
https://doi.org/10.5194/amt-2020-392 Preprint. Discussion started: 14 October 2020 c Author(s) 2020. CC BY 4.0 License. The Roland von Glasow Air-Sea-Ice Chamber (RvG-ASIC): an experimental facility for studying ocean/sea-ice/atmosphere interactions Max Thomas1, James France1,2,3, Odile Crabeck1, Benjamin Hall4, Verena Hof5, Dirk Notz5,6, Tokoloho Rampai4, Leif Riemenschneider5, Oliver Tooth1, Mathilde Tranter1, and Jan Kaiser1 1Centre for Ocean and Atmospheric Sciences, School of Environmental Sciences, University of East Anglia, UK, NR4 7TJ 2British Antarctic Survey, Natural Environment Research Council, Cambridge CB3 0ET, UK 3Department of Earth Sciences, Royal Holloway, University of London, Egham TW20 0EX, UK 4Chemical Engineering Deptartment, University of Cape Town, South Africa 5Max Planck Institute for Meteorology, Hamburg, Germany 6Center for Earth System Research and Sustainability (CEN), University of Hamburg, Germany Correspondence: Jan Kaiser ([email protected]) Abstract. Sea ice is difficult, expensive, and potentially dangerous to observe in nature. The remoteness of the Arctic and Southern Oceans complicates sampling logistics, while the heterogeneous nature of sea ice and rapidly changing environmental conditions present challenges for conducting process studies. Here, we describe the Roland von Glasow Air-Sea-Ice Chamber (RvG-ASIC), a laboratory facility designed to reproduce polar processes and overcome some of these challenges. The RvG- 5 ASIC is an open-topped 3.5 m3 glass tank housed in a coldroom (temperature range: -55 to +30 oC). The RvG-ASIC is equipped with a wide suite of instruments for ocean, sea ice, and atmospheric measurements, as well as visible and UV lighting. -

Satellite Observations for Detecting and Forecasting Sea-Ice Conditions: a Summary of Advances Made in the SPICES Project by the EU’S Horizon 2020 Programme
remote sensing Article Satellite Observations for Detecting and Forecasting Sea-Ice Conditions: A Summary of Advances Made in the SPICES Project by the EU’s Horizon 2020 Programme Marko Mäkynen 1,* , Jari Haapala 1, Giuseppe Aulicino 2 , Beena Balan-Sarojini 3, Magdalena Balmaseda 3, Alexandru Gegiuc 1 , Fanny Girard-Ardhuin 4, Stefan Hendricks 5, Georg Heygster 6, Larysa Istomina 5, Lars Kaleschke 5, Juha Karvonen 1 , Thomas Krumpen 5, Mikko Lensu 1, Michael Mayer 3,7, Flavio Parmiggiani 8 , Robert Ricker 4,5 , Eero Rinne 1, Amelie Schmitt 9 , Markku Similä 1 , Steffen Tietsche 3 , Rasmus Tonboe 10, Peter Wadhams 11, Mai Winstrup 12 and Hao Zuo 3 1 Finnish Meteorological Institute, PB 503, FI-00101 Helsinki, Finland; jari.haapala@fmi.fi (J.H.); alexandru.gegiuc@fmi.fi (A.G.); juha.karvonen@fmi.fi (J.K.); mikko.lensu@fmi.fi (M.L.); eero.rinne@fmi.fi (E.R.); markku.simila@fmi.fi (M.S.) 2 Department of Science and Technology—DiST, Università degli Studi di Napoli Parthenope, Centro Direzionale Is C4, 80143 Napoli, Italy; [email protected] 3 European Centre for Medium-Range Weather forecasts, Shinfield Park, Reading RG2 9AX, UK; [email protected] (B.B.-S.); [email protected] (M.B.); [email protected] (M.M.); steff[email protected] (S.T.); [email protected] (H.Z.) 4 Ifremer, Univ. Brest, CNRS, IRD, Laboratoire d’Océanographie Physique et Spatiale, IUEM, 29280 Brest, France; [email protected] 5 AlfredWegener Institute, Am Handelshafen 12, 27570 Bremerhaven, Germany; [email protected] (S.H.); -

Observing the Seasonal Ice Zone in the Western Arctic
SPECIAL ISSUE ON AUTONOMOUS AND LAGRANGIAN PLATFORMS AND SENSORS (ALPS) An Autonomous Approach to Observing the Seasonal Ice Zone in the Western Arctic By Craig M. Lee, Jim Thomson, and the Marginal Ice Zone and Arctic Sea State Teams 56 Oceanography | Vol.30, No.2 ABSTRACT. The Marginal Ice Zone and Arctic Sea State programs examined the MIZ is a region of complex atmosphere- processes that govern evolution of the rapidly changing seasonal ice zone in the Beaufort ice-ocean dynamics that varies with sea Sea. Autonomous platforms operating from the ice and within the water column ice properties and distance from the ice collected measurements across the atmosphere-ice-ocean system and provided the edge (Figure 2; e.g., Morison et al., 1987). persistence to sample continuously through the springtime retreat and autumn advance Additionally, the northward retreat of of sea ice. Autonomous platforms also allowed operational modalities that reduced the sea ice exposes an increasing expanse of field programs’ logistical requirements. Observations indicate that thermodynamics, open water south of the ice edge, eventu- especially the radiative balances of the ice-albedo feedback, govern the seasonal cycle ally providing sufficient fetch for the gen- of sea ice, with the role of surface waves confined to specific events. Continuous eration of long-period, large-amplitude sampling from winter into autumn also reveals the imprint of winter ice conditions and waves (e.g., Thomson and Rogers, 2014). fracturing on summertime floe size distribution. These programs demonstrate effective Such waves are capable of propagating use of integrated systems of autonomous platforms for persistent, multiscale Arctic north and penetrating into the pack to observing. -

Chapter 32 Ice Navigation
CHAPTER 32 ICE NAVIGATION INTRODUCTION 3200. Ice and the Navigator mate average for the oceans, the freezing point is –1.88°C. As the density of surface seawater increases with de- Sea ice has posed a problem to the navigator since creasing temperature, convective density-driven currents antiquity. During a voyage from the Mediterranean to are induced bringing warmer, less dense water to the sur- England and Norway sometime between 350 B.C. and 300 face. If the polar seas consisted of water with constant B.C., Pytheas of Massalia sighted a strange substance salinity, the entire water column would have to be cooled to which he described as “neither land nor air nor water” the freezing point in this manner before ice would begin to floating upon and covering the northern sea over which the form. This is not the case, however, in the polar regions summer sun barely set. Pytheas named this lonely region where the vertical salinity distribution is such that the sur- Thule, hence Ultima Thule (farthest north or land’s end). face waters are underlain at shallow depth by waters of Thus began over 20 centuries of polar exploration. higher salinity. In this instance density currents form a shal- Ice is of direct concern to the navigator because it low mixed layer which subsequently cannot mix with the restricts and sometimes controls vessel movements; it deep layer of warmer but saltier water. Ice will then begin affects dead reckoning by forcing frequent changes of forming at the water surface when density currents cease course and speed; it affects piloting by altering the and the surface water reaches its freezing point. -

Pancake Ice Floe Size Distribution During the Winter
Brief communication: Pancake ice floe size distribution during the winter expansion of the Antarctic marginal ice zone Alberto Alberello1,*, Miguel Onorato2,3, Luke Bennetts4, Marcello Vichi5,6, Clare Eayrs7, Keith MacHutchon8, and Alessandro Toffoli1 1Department of Infrastructure Engineering, The University of Melbourne, Parkville, VIC 3010, Australia. 2Dipartimento di Fisica, Università di Torino, Torino, 10125, Italy. 3INFN, Sezione di Torino, Torino, 10125, Italy. 4School of Mathematical Sciences, University of Adelaide, Adelaide, SA 5005, Australia 5Department of Oceanography, University of Cape Town, Rondenbosch, 7701, South Africa. 6Marine Research Institute, University of Cape Town, Rondenbosch, 7701, South Africa. 7Center for Global Sea Level Change, New York University Abu Dhabi, Abu Dhabi, United Arab Emirates. 8Department of Civil Engineering, University of Cape Town, Rondenbosch, 7701, South Africa. *now at: School of Mathematical Sciences, University of Adelaide, Adelaide, SA 5005, Australia Correspondence: Alberto Alberello ([email protected]) Abstract. The size distribution of pancake ice floes is calculated from images acquired during a voyage to the Antarctic marginal ice zone in the winter expansion season. Results show that 50 % of the sea ice area is made up by floes with diameters 2.3–4 m. The floe size distribution shows two distinct slopes on either side of the 2.3–4 m range. Following a relevant recent study, it 5 is conjectured that growth of pancakes from frazil forms the distribution of small floes (D < 2:3 m), and welding of pancakes forms the distribution of large floes (D > 4 m). Copyright statement. TEXT 1 Introduction Prognostic floe size distributions are being integrated into the next generation of large-scale sea ice models (Horvat and Tziper- 10 man, 2015; Zhang et al., 2015, 2016; Bennetts et al., 2017; Roach et al., 2018a). -
Lecture Ice in the Ocean Ice Ages and Sea Level History
Outline for this week ESCI 1006 & 1106 Oceanography -Sea ice - Arctic and Antarctic sea ice Week 9: Lecture - Glaciers, ice streams, and icebergs - Ice cores as paleoclimatic archives Ice in the ocean - Past climate Ice ages and sea level history - Sea-level history Parts of Chapters: 4 (p. 116-117), 5 (p. 147- 148), 6 (p. 176-177), 12 (p. 337-338; p. 352) Types of Ice Sea ice formation Glacial ice - forms from the accumulation & compression When seawater begins to freeze at ~ –1.8o C, small needle-like ice of snow (land ice; source of icebergs) crystals (~3-4 mm in diameter) called frazil form. Frazil crystals consist of nearly pure fresh water. https://www.cbc.ca/news/canada/newfoundland‐labrador Sea ice - forms from the freezing of sea water and is Don Perovich floating on the surface of the ocean. Sea ice covers ~7% In calm seas, the crystals form grease ice. Thin sheets of grease of the ocean but only 0.1% of Earth’s ice volume) ice, or nilas, have smooth and an oily or greasy appearance. Sea ice formation Pressure ridge from colliding ice In rough seas, ice crystals converge into slushy pancakes. Don Perovich Pancake ice Individual pieces pile up to form rafts and solidify. Any relatively flat piece of ice >20 m is called NOAA https://www.swisseduc.ch/glaciers/antarctic floe. Ice floes then freeze Sea ice that is not more than one winter old is known as first-year ice. together into ice fields. Sea ice that lasts one or more summers is known as multiyear ice. -

Field Observations on Slush Ice Generated During Freezeup in Arctic Coastal Waters
FIELD OBSERVATIONS ON SLUSH ICE GENERATED DURING FREEZEUP IN ARCTIC COASTAL WATERS . by Erk Reimnitz and E. W. Kempema U.S. Geological Survey Menlo Park, California 94025 Final Report Outer Continental Shelf Environmental Assessment Program Research Unit 205 1986 331 ACKNOWLEDGMENTS This study was funded in part by the Minerals Management Service, Department of the Interior, through interagency agreement with the National Oceanic and Atmospheric Administration, Department of Commerce, as part of the Alaska Outer Continental Shelf Environmental Assessment Program. Without this long term support and encouragement of our field program, the observations incorporated into this study could not have been made. Moira Dunbar pointed out problems with our usage of ice terminology, and George Moore’s critical review greatly improved the paper. We thank them for their help. We are very grateful to Ken Dunton, who freely shared with us logistics for winter field operations and his own numerous independent observations. Finally, we thank Peter Barnes for many discussions of the topic. 333 ABSTRACT In some years, large volumes of slush ice charged with sediment are generated from frazil ice in the shallow Beaufort Sea during strong storms at the time of freezeup. Such events ter- minate the navigation season, and because of accompanying hostile conditions, very little is known about the processes acting. The water-saturated slush ice, which may reach a thickness of 4 m, exists for only a few days before freezing from the surface downward arrests further wave motion or pancake ice forms. Movement of small vessels and divers in the slush ice is accomplished only in phase with passing waves, producing compression and rarefaction, and internal pressure pulses. -

ICE TERMINOLOGY By
ICE TERMINOLOGY by L i e u t .-C o m m a n d e r H. BENCKER, T e c h n i c a l A s s i s t a n t . With acknowledgments to the AJIbEOM JlEflOBblX 0 BPA30 BAHHfi (Albom Liedovik Obrasovanii) Album of Ice Forms, published b y the Russian Hydrographic Office, 1930. FOREWORD. The various Sailing Directions for the Arctic Seas and for the vicinities of Iceland and Newfoundland usually devote one paragraph of the chapter :— General Information, to a description of the various forms of ice which the seaman may encounter in these waters and endeavour to define certain generic terms to designate them. Thus certain definitions of terms relating to forms of ice appear in the Arctic Pilot, Vol. II., 3rd Edition, 1921, published by the Hydrographic Department of the British Admiralty. The Newfoundland and Labrador Pilot, 6th Edition, 1929, gives similar definitions of some of the more usual terms; yet others were given in the preceding edition issued in i 9!7- Arctic Pilot, Vol. I., 3rd Edition, 1918, based on Russian publications, also gives, on pages 19 and 20, a list in the English and Russian languages of terms rela ting to ice-forms. The Danish Meteorological Institute, Copenhagen, gives in its yearly publi cation entitled Nautisk-Meteorologisk Aarbog (Nautical Meteorological Annual) certain definitions of terms and abbreviations to facilitate the reading of the charts showing the ice conditions in the Arctic Seas which it publishes. The Instructions Nautiques N° 320 (Sailing Directions N° 320) for the island of Newfoundland and Belle-Isle Strait, published in 1920 by the French Service Hydrographique, also gives (page 31) the definitions of several English terms used to designate ice-forms. -

Waves in Sea Ice
no. <5/2008> <Oceanography> Waves in sea ice Göran Broström Kai Christensen Wave in pancake ice report Title Date Waves in sea ice 31032008 Section Report no. Oceanography 5 Author(s) Classification Göran Broström Free Restricted Kai Christensen ISSN <nummer> e-ISSN <nummer> Client(s) Client’s reference StatoilHydro <referanse> Abstract This study provides an overview on how waves and ice interacts in the ocean. The most relevant ice characteristics found in the ocean is described, and their role on the wave dynamics is outlined. The impacts of the waves on the ice field are also described to some extent. Two different models for wave ice interaction, namely the “standard” mathematical model describing wave scatter due to ice floes, and a model describing waves in slush ice are presented in some detail. Energy transport models applying a Boltzman type of scattering are also briefly described. It is concluded that wave ice interaction is challenging to describe in detail, and mathematical models describing wave ice interaction are often very complicated mathematically and employ advanced mathematical methods. Nevertheless, there are some simple fundamental principles that can be applied for modeling the wave energy in ice conditions. It is concluded that met.no has the capacity to implement a wave-in-ice model although it may require a considerable effort. The authors suggest that there is a mismatch between the theoretical developments describing wave ice interactions, and observational and laboratory studies. Interlinked studies using dedicated field experiments, laboratory experiments, and numerical models targeting realistic physical system are needed for advancing the present state-of-the-art knowledge of wave ice interaction.