Scram Release for a Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Forklift Differentials
Forklift Differentials Forklift Differential - A mechanical device which could transmit rotation and torque through three shafts is known as a differential. At times but not at all times the differential would use gears and will operate in two ways: in automobiles, it provides two outputs and receives one input. The other way a differential works is to combine two inputs in order to produce an output that is the sum, average or difference of the inputs. In wheeled vehicles, the differential enables all tires to be able to rotate at various speeds while supplying equal torque to all of them. The differential is intended to drive a pair of wheels with equivalent torque while enabling them to rotate at various speeds. While driving around corners, a car's wheels rotate at different speeds. Several vehicles such as karts operate without using a differential and use an axle instead. If these vehicles are turning corners, both driving wheels are forced to spin at the same speed, normally on a common axle which is driven by a simple chain-drive mechanism. The inner wheel should travel a shorter distance compared to the outer wheel while cornering. Without using a differential, the effect is the outer wheel dragging and or the inner wheel spinning. This puts strain on drive train, causing unpredictable handling, difficult driving and damage to the tires and the roads. The amount of traction necessary to move the car at whichever given moment depends on the load at that moment. How much drag or friction there is, the car's momentum, the gradient of the road and how heavy the automobile is are all contributing factors. -
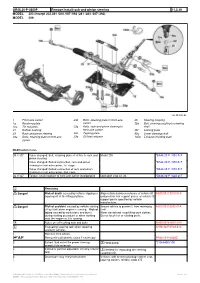
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

POWER and MANUAL RACK and PINION STEERING Tabla De Diagnostico De Problemas Blies by Removing the Sans Barres D’Accouplement Ni Original a La De Reemplazo
930724-22(R&P) 11/20/03 12:46 PM Page 1 Troubleshooting Chart Tableau de Dépannage - 2. Remove the tie rod assem- Ce type de direction est fourni de las mismas de la unidad 7. Secure the inner tie rod ATTENTION: Ne forcez pas sujetar la cremallera. ’é POWER AND MANUAL RACK AND PINION STEERING Tabla de Diagnostico de Problemas blies by removing the sans barres d’accouplement ni original a la de reemplazo. Se housings. For GM and sur le joint de la crémaillère ni 5. Instale las barras de Step-By-Step Instructions inner tie rod housing. embouts intérieurs ou suministra un juego que con- Chrysler units, stake the sur le pignon. Utilisez toujours acoplamiento en la unidad de DIRECTION À CRÉMAILLÈRE ASSISTÉE OU MANUELLE NOTE: Ford units require extérieurs. Vous devez trans- tiene las partes necesarias housing. For Ford units, une pince pour maintenir la reemplazo, teniendo cuidado de Notice d’installation détaillée férer les barres d’accouple- para garantizar una insta- install the lock pins sup- crémaillère. drilling out a pin or removing instalar la barra de servoir. DIRECCIÓN DE PI—”N Y CREMALLERA MANUAL Y SERVOASISTIDA é ment et les embouts de la laciÛn correcta. plied in the installation kit. rifiez/corrigez la Instrucciones de instalación por pasos a roll pin before the inner tie 5. Installez les barres d’ac- acoplamiento derecha en el é direction d’origine sur la nou- sito. rod can be detached. 1. DespuÈs de quitar la unidad 8. Install the shock dampen- couplement sur la nouvelle lado derecho y la izquierda en ricos (o-rings) o Û velle. -

Technical Engineering Guide
TTEECHCHNINICALCAL EN ENGGINEEINEERRININGG 89 www.diamondchain.com TECHNICAL ENGINEERING General Drive Considerations One of the main advantages of the roller chain drive is its ability to perform well under widely varying conditions. Despite this ability, there are a number of rules of good design practice which, if considered early in the design pro- cess, will enable the user to obtain desirable results. Basic dimensions and minimum ultimate tensile requirements for single-pitch, double-pitch and attachment roller chains are specified by various standards organizations worldwide. ASME/ANSI, The American Society of Mechanical Engineers and The American National Standards Institute, defines dimensions such as: pitch, roller width, roller diameter, link plate height, link plate thickness and pin diameter. The primary purpose of the standard is to ensure that manufacturers will produce chains and sub-assemblies that are similar dimensionally and therefore interchangeable. In addition, the standard does offer the user some assurance of quality by defining a minimum ultimate tensile strength for each model of chain. However, tensile strength is not always a valid method to differentiate one manufacturer’s product from another. It is very important to remember that dimensional standardization does not define quality or performance characteristics. Minimum Ultimate Tensile Strength: Minimum Ultimate Tensile Strength, MUTS, is the static load required to break the chain. Tensile strength values shown in this catalog are not allowable working loads. Load or tension applied 1 to the chain in service should never exceed ⁄6 th of the UTS. If exceeding this value is necessary for a specific applica- tion, contact Diamond Chain. -

Electronic Power Steering Rack and Pinion
Remanufactured ELECTRONIC POWER STEERING RACK AND PINION Expertly remanufactured to rigorous quality and performance standards, Product Description CARDONE® Electronic Power Steering Rack and Pinions are equipped with brand-new, premium components to guarantee exceptional longevity and Features and Benefits reliability. Each unit undergoes CARDONE’s Factory Test Drive, simulating Signs of Wear and extreme operating conditions while verifying all on-car communications. Troubleshooting All rubber sealing components are replaced, and a specialized lubricant is applied to drastically increase longevity. FAQs • 100% replacement of rubber sealing components • Application of specialized lubricant(s) for extended life • Finished in protective coating to prevent corrosion and rust • All rack & pinion/gearbox units meet or exceed O.E. form, fit and function. Signs of Wear and Troubleshooting • Knocking or clunking • Vibrations • Power Steering Assist System failure warning on Driver Information Center. • A catch or bind going into or coming out of a turn in either direction. • Intermittent high pitched screeching noise similar to the sound of a motor being actuated. Subscribe to receive email notification whenever cardone.com we introduce new products or technical videos. Tech Service: 888-280-8324 Click Steering Tech Help for technical tips, articles and installation videos. Rev Date:Rev 063015 Date: 021518 • Vehicle has a tendency to wander requiring the driver to make frequent and random and steering wheel corrections to either direction. Product Description • Shimmy; driver observes small or large, consistent, rotational oscillations Features and Benefits of the steering wheel caused by various road surfaces or side-to-side Signs of Wear and (lateral) tire/wheel movements. Troubleshooting • Poor return ability or sticky steering; the poor return of the steering FAQs wheel to center after a turn. -

The Modern Collectible
SKINNED KNUCKLES LARES ARTICLE CORPORATION The Modern Collectible by Orest Lazarowich A DETAILED TECHNICAL COLUMN INTENDED TO TARGET MANY MAKES AND MODELS OF POST-WAR CARS AND PICK-UP TRUCKS the steering wheel is not being turned, power Rack and Pinion steering fluid is directed around the rotary valve and out to the reservoir. The pressure is equal on Power Steering both sides of the piston. As the steering wheel is The rack and pinion power steering differs turned, the torsion bar twists and rotates the rotary slightly from the manual rack and pinion steering. valve. The valve blocks the port to the reservoir, Part of the rack contains a cylinder with a piston and fluid now flows through an opening to one in the middle. The piston is connected to the rack. side of the steering gear. At the same time the There are two fluid ports, one on either side of the other side of the cylinder is vented to the reser- piston. A torsion bar directs the rotary valve voir. With fluid pressure to one side of the piston which is connected to the steering wheel. When and none to the other, the piston moves which in RETURN LINE PUMP RESERVOIR Magazine. STEERING COLUMN ROTARY VALVE PRESSURE LINE TO ROTARY VALVE Skinned Knuckles Skinned FLUID LINES FROM ROTARY VALVE RACK HYDRAULIC PISTON PINION JULY 2014 - PAGE 11 Article content provided by Lares Corporation Steering Components • CALL 1.800.555.0767 • VISIT www.LaresCorp.com SKINNED KNUCKLES LARES ARTICLE CORPORATION turn moves the rack and causes the wheels to turn. -
Wipro Drive-By-Wire Solutions
Wipro Drive-By-Wire Solutions Accelerating Your Autonomous Vehicles Development Journey Wipro’s drive-by-wire system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Introduction Wipro’s drive-by-wire solutions enable electronic control of braking, throttle, steering, and shifting in vehicles. We understand that the intricacies of drive-by-wire solutions differ between prototype and production-grade vehicles. We implement customized and apt drive-by-wire solutions together with our trusted technology partners for any vehicle type. The system implementation extends from navigation controls to robotics controls, thus making it a comprehensive solution. Compliance to safety regulations is ensured in all implementations. Key Takeaways Prototype and one-off vehicles A less invasive approach of installing fully electrically operated servo actuators for functions Production vehicles Replacing existing systems such as power-assisted rack and pinion assembly with EPS and EPAS for steer-by-wire systems Supplementary / Auxiliary control options Direct electronic actuation with solenoid and servo proportional valves for material handling equipment such as hydraulically operated forklifts and cranes All our drive-by-wire designs meet regulatory requirements like ISO26262, ASIL-D, FMVSS and AUTOSAR Key benefits and features of Wipro drive-by-wire systems To provide the appropriate solution to the vehicle type, we place the use case-specific sensors, electronic controllers and central computing platform on top of drive-by-wire enabled system and this is integrated with Wipro’s autonomous navigation AI algorithm software stack. The autonomous navigation stack together with our range of robotic arm movement capabilities, make the end-to-end solution appropriate for any moving machine. -

Roller Drive Chain Selection and Engineering Information
sec_29.3_29.4_TI 11/19/08 12:45 PM Page 231 Roller Drive Chain Selection 29 Roller Drive Chain Selection and Engineering Information Required information for drive selection: Table 1: Service Factors 1. Type of input power (electric motor, internal combustion Type of Input Power engine, etc.). Internal Internal 2. Type of equipment to be driven. Class of Driven Combustion Combustion Electric Motor 3. Horsepower (HP) to be transmitted. Load Engine with Engine with or Turbine Information Technical Mechanical 4. Full load speed of the fastest running shaft (RPM). Hydraulic Drive Drive 5. Desired speed of the slow-running shaft. NOTE: If the speeds are variable, determine the horsepower to be Uniform 1 1 1.2 transmitted at each speed. Moderate 1.2 1.3 1.4 6. Diameters of the driver and driven shafts. Heavy 1.4 1.5 1.7 7. Center distance of the shafts. NOTE: If this distance is adjustable, determine the Step 3: Calculate the Design Horsepower. amount of adjustment. Design Horsepower = HP x Service Factor 8. Position of drive and space limitations (if any). 9. Conditions of the drive. Drives with more than two The design horsepower equals the horsepower to be sprockets, idlers, or unusual conditions such as severely transmitted times the service factor found in Table 1. abrasive or corrosive environments, severely high or low temperatures, widely fluctuating loads, frequent starts Step 4: Select the Chain Pitch. and stops, etc., require special attention. It is advisable From the Quick Selector Chart on page 234, make a to consult with Renold Jeffrey engineering personnel in tentative chain selection as follows: these situations. -
Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester Sneha Ganesh Clemson University
Clemson University TigerPrints All Theses Theses 12-2017 Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester Sneha Ganesh Clemson University Follow this and additional works at: https://tigerprints.clemson.edu/all_theses Recommended Citation Ganesh, Sneha, "Design and Analysis of a Mechanical Driveline with Generator for an Atmospheric Energy Harvester" (2017). All Theses. 2794. https://tigerprints.clemson.edu/all_theses/2794 This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. DESIGN AND ANALYSIS OF A MECHANICAL DRIVELINE WITH GENERATOR FOR AN ATMOSPHERIC ENERGY HARVESTER A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mechanical Engineering by Sneha Ganesh December 2017 Accepted by: Dr. John Wagner, Committee Chair Dr. Yue (Sophie) Wang Dr. Todd Schweisinger ABSTRACT The advent of renewable energy as a primary power source for microelectronic devices has motivated research within the energy harvesting community over the past decade. Compact, self-contained, portable energy harvesters can be applied to wireless sensor networks, Internet of Things (IoT) smart appliances, and a multitude of standalone equipment; replacing batteries and improving the operational life of such systems. Atmospheric changes influenced by cyclical temporal variations offer an abundance of harvestable thermal energy. However, the low conversion efficiency of a common thermoelectric device does not tend to be practical for microcircuit operations. One solution may lie in a novel electromechanical power transformer integrated with a thermodynamic based phase change material to create a temperature/pressure energy harvester. -

Design of Rack and Pinion Steering for All Terrain Vehicle
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 06 Issue: 02 | Feb 2019 www.irjet.net p-ISSN: 2395-0072 DESIGN OF RACK AND PINION STEERING FOR ALL TERRAIN VEHICLE Ajay M. Tayde1, Sanket P. Golhar2, Shital R. Ughade3, Nikita Ramdas Kakde4 1,2,3,4Student, Department of Mechanical Engineering, PRMIT&R, Badnera, Amravati University, Maharashtra (INDIA) ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract: Aim is to design a Rack and Pinion Gearbox Above fig. shows the Rack and pinion steering is a simple (RPG) which has desired steering ratio, zero play in the system that directly converts the rotation of the steering Rack and pinion gear box and sensitive steering. Rack and wheel to straight line movement at the wheels. The pinion steering systems are commonly used due to their steering gear consists of the rack, pinion, and related simplicity in construction and compactness. Main purpose housings and support bearings. Turning the steering of this paper is to design the rack and pinion steering wheel causes the pinion to rotate. system. In this paper analyzed the two components of the steering system. In order to calculate the stresses, safety 1.1 Requirements of steering system factor, no of teeth on rack and pinion. Improve the performance of steering system. 1) Provide the proper turning to vehicle on sharp edges of track. Key words: Rack and pinion, teeth, addendum, 2) Require minimum effort to turn the vehicle. Dedendum, pitch circle 3) Design in such a way that minimum shock will be acts on driver. 1. Introduction 4) Loss of steering wheel control should not occur. -
Mechanical Clutches and Torque Overload Devices Catalog
MECHANICAL CLUTCHES AND TORQUE OVERLOAD DEVICES CATALOG Regal Power Transmission Solutions 7120 New Buffington Road Florence, KY 41042 Customer Service: 800-626-2120 Fax: 800-262-3292 Technical Service: 800-626-2093 www.RegalPTS.com APPLICATION CONSIDERATIONS MECHANICAL CLUTCHES The proper selection and application of power transmission products and components, including the related area of product safety, is the responsibility of the customer. Operating and performance requirements and potential associated issues will vary appreciably depending upon the use and application of such products and components. The scope of the technical and application information included in this publication is necessarily limited. Unusual operating environments and conditions, lubrication requirements, loading supports, and other factors can materially affect the application and operating results of the products and components and the customer should carefully review its requirements. Any technical advice or review furnished by Regal-Beloit America, Inc. and AND TORQUE OVERLOAD its affiliates with respect to the use of products and components is given in good faith and without charge, and Regal assumes no obligation or liability for the advice given, or results obtained, all such advice and review being given and accepted at customer’s risk. For a copy of our Standard Terms and Conditions of Sale, Disclaimers of Warranty, Limitation of Liability and Remedy, please contact Customer Service at 1-800-626-2120. These terms and conditions of sale, disclaimers and limitations of liability apply to any person who may buy, acquire or use a Regal Beloit America Inc. product referred to herein, including any person who buys from a licensed DEVICES CATALOG distributor of these branded products. -
1700 Animated Linkages
Nguyen Duc Thang 1700 ANIMATED MECHANICAL MECHANISMS With Images, Brief explanations and Youtube links. Part 1 Transmission of continuous rotation Renewed on 31 December 2014 1 This document is divided into 3 parts. Part 1: Transmission of continuous rotation Part 2: Other kinds of motion transmission Part 3: Mechanisms of specific purposes Autodesk Inventor is used to create all videos in this document. They are available on Youtube channel “thang010146”. To bring as many as possible existing mechanical mechanisms into this document is author’s desire. However it is obstructed by author’s ability and Inventor’s capacity. Therefore from this document may be absent such mechanisms that are of complicated structure or include flexible and fluid links. This document is periodically renewed because the video building is continuous as long as possible. The renewed time is shown on the first page. This document may be helpful for people, who - have to deal with mechanical mechanisms everyday - see mechanical mechanisms as a hobby Any criticism or suggestion is highly appreciated with the author’s hope to make this document more useful. Author’s information: Name: Nguyen Duc Thang Birth year: 1946 Birth place: Hue city, Vietnam Residence place: Hanoi, Vietnam Education: - Mechanical engineer, 1969, Hanoi University of Technology, Vietnam - Doctor of Engineering, 1984, Kosice University of Technology, Slovakia Job history: - Designer of small mechanical engineering enterprises in Hanoi. - Retirement in 2002. Contact Email: [email protected] 2 Table of Contents 1. Continuous rotation transmission .................................................................................4 1.1. Couplings ....................................................................................................................4 1.2. Clutches ....................................................................................................................13 1.2.1. Two way clutches...............................................................................................13 1.2.1.