Integration of a 15-Element, VHF Bow-Tie Antenna Array Into an Aerodynamic Fairing on a NASA P-3 Aircraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting
2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting Final Program 7–12 July 2019 Hilton Atlanta Atlanta, Georgia, U.S.A. Conference at a Glance Saturday, July 6 14:00-16:00 Strategic Planning Committee 16:15-17:15 AP-S Meetings Committee 17:15-18:15 JMC Meeting (Closed Session) 18:15-21:30 JMC Meeting, Dinner and Presentations 19:15-21:15 IEEE AP-S Constitution and Bylaws Committee Meeting & Dinner Sunday, July 7 08:00-10:00 Past Presidents’ Breakfast 10:00-18:00 AdCom Meeting 19:30-22:00 Welcome Dessert Reception at the Georgia Aquarium Monday, July 8 07:00-08:00 Amateur Radio Operators Breakfast 08:00-11:40 Technical Sessions 09:00-18:00 Technical Tour - “An Engineer’s Eye View” of the Mercedes Benz Stadium 12:00-13:20 Transactions on Antennas and Propagation Editorial Board Lunch Meeting 13:20-17:00 Technical Sessions 17:00-18:00 URSI Commission A Business Meeting 17:00-18:00 URSI Commission B Business Meeting 17:00-18:00 URSI Commissions C/E (combined) Business Meeting Tuesday, July 9 07:00-08:00 AP Magazine Staff Meeting 07:00-08:00 APS 2020 Committee Meeting 07:00-08:00 Industrial Initiatives 07:00-08:00 Membership Committee Meeting 07:00-08:00 Student Design Contest (Set-Up - Closed to Others) 07:00-08:00 Technical Committee on Antenna Measurement 08:00-11:40 Student Paper Competition 08:00-11:40 Technical Sessions 08:00-09:30 Student Design Contest (Demo for Judges - Closed to Others) 08:30-14:00 Standards Committee Meeting 09:30-12:00 Student Design Contest (Demo for Public) -

Various Types of Antenna with Respect to Their Applications: a Review
INTERNATIONAL JOURNAL OF MULTIDISCIPLINARY SCIENCES AND ENGINEERING, VOL. 7, NO. 3, MARCH 2016 Various Types of Antenna with Respect to their Applications: A Review Abdul Qadir Khan1, Muhammad Riaz2 and Anas Bilal3 1,2,3School of Information Technology, The University of Lahore, Islamabad Campus [email protected], [email protected], [email protected] Abstract– Antenna is the most important part in wireless point to point communication where increase gain and communication systems. Antenna transforms electrical signals lessened wave impedance are required [45]. into radio waves and vice versa. The antennas are of various As the knowledge about antennas along with its application kinds and having different characteristics according to the need is particularly less thus this review is essential for determining of signal transmission and reception. In this paper, we present various antennas and their applications in different systems. comparative analysis of various types of antennas that can be differentiated with respect to their shapes, material used, signal In this paper a detailed review of various types of antenna bandwidth, transmission range etc. Our main focus is to classify which developed to perform useful task of communication in these antennas according to their applications. As in the modern different field of communication network is presented. era antennas are the basic prerequisites for wireless communications that is required for fast and efficient II. WIRE ANTENNA communications. This paper will help the design architect to choose proper antenna for the desired application. A. Biconical Dipole Antenna Keywords– Antenna, Communications, Applications and Signal There is no restriction to the data transfer capacity of an Transmission infinite constant-impedance transmission line however any pragmatic execution of the biconical dipole has appendages of constrained extend forming an open-circuit stub in the same I. -

Here's a Quick Way to Know About Different Types of Antennas
11/28/2016 Different types of Antennas with Properties and thier Working HOME PROJECT IDEAS › POPULAR PROJECTS › ELECTRICAL › ELECTRONICS B.TECH PROJECTS Expert Outreach Communication Giveaways IC › Infographics Projects › Here’s a Quick Way to Know about Different Types of Antennas by Tarun Agarwal | at COMMUNICATION China Prototype PCB: 2 Register to get 10pcs for Free 4 days shipping. Register 10pcs Free now! In this modern era of wireless communication, many engineers are showing interest to do specialization in communication fields, but this requires basic knowledge of fundamental communication concepts such as types of antennas, electromagnetic radiation and various phenomena related to propagation, etc. In case of wireless communication systems, antennas play a prominent role as they convert the electronic signals into electromagnetic waves efficiently. Ads by Google Antenna Design Patch Antenna Types of Antennas https://www.elprocus.com/differenttypesofantennaswithpropertiesandthierworking/ 1/13 11/28/2016 Different types of Antennas with Properties and thier Working Antennas are basic components of any electrical circuit as they provide interconnecting links between transmitter and free space or between free space and receiver. Before we discuss about antenna types, there are a few properties that need to be understood. Apart from these properties, we also cover about different types of antennas used in communication system in detail. Properties of Antennas Antenna Gain Aperture Directivity and bandwidth Polarization Effective length Polar diagram Antenna Gain: The parameter that measures the degree of directivity of antenna’s radial pattern is known as gain. An antenna with a higher gain is more effective in its radiation pattern. -

Lecture 28 Different Types of Antennas–Heuristics
Lecture 28 Different Types of Antennas{Heuristics 28.1 Types of Antennas There are different types of antennas for different applications [128]. We will discuss their functions heuristically in the following discussions. 28.1.1 Resonance Tunneling in Antenna A simple antenna like a short dipole behaves like a Hertzian dipole with an effective length. A short dipole has an input impedance resembling that of a capacitor. Hence, it is difficult to drive current into the antenna unless other elements are added. Hertz used two metallic spheres to increase the current flow. When a large current flows on the stem of the Hertzian dipole, the stem starts to act like inductor. Thus, the end cap capacitances and the stem inductance together can act like a resonator enhancing the current flow on the antenna. Some antennas are deliberately built to resonate with its structure to enhance its radiation. A half-wave dipole is such an antenna as shown in Figure 28.1 [124]. One can think that these antennas are using resonance tunneling to enhance their radiation efficiencies. A half-wave dipole can also be thought of as a flared open transmission line in order to make it radiate. It can be gradually morphed from a quarter-wavelength transmission line as shown in Figure 28.1. A transmission is a poor radiator, because the electromagnetic energy is trapped between two pieces of metal. But a flared transmission line can radiate its field to free space. The dipole antenna, though a simple device, has been extensively studied by King [129]. He has reputed to have produced over 100 PhD students studying the dipole antenna. -
All About the Discone Antenna: Antenna of Mysterious Origin And
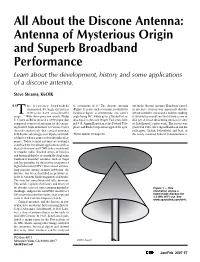
All About the Discone Antenna: Antenna of Mysterious Origin and Superb Broadband Performance Learn about the development, history and some applications of a discone antenna. Steve Stearns, K6OIK he frequency bandwidths as extensions of it.1 The discone antenna ent on the discone antenna. Kandoian’s novel “ demanded by high-definition (Figure 1) is one such extension, in which the or inventive element was apparently that the T television have considerable biconical dipole is asymmetric, one cone’s antenna could be encased in a radome, making range…” With these prescient words, Philip angle being 90°, which gives a flat disk of ra- it suitable for aircraft, not that it used a cone or S. Carter of RCA opened a 1939 paper that dius equal to the cone length. Two years later, disk per se, those ideas being obvious in view compared a variety of antennas for the emerg- in 1943, Armig Kandoian at the Federal Tele- of Schelkunoff’s prior work. The patent was ing field of “high-definition” television. Carter phone and Radio Corporation applied for a pat- granted in 1945, whereupon Kandoian and his showed conclusively that conical antennas colleagues, Sichak, Felsenheld, and Nail, at held distinct advantages over dipoles and fold- 1Notes appear on page 43. the newly renamed Federal Telecommunica- ed dipoles when it comes to broadband perfor- mance. Today, conical antennas are making a comeback for broadband applications such as digital television and UWB (ultra-wideband) or impulse radio. Stacked arrays of bowties and biconical dipoles are gradually displacing traditional mainstay antennas such as Yagis and log-periodics for the rooftop reception of digital television (DTV). -

New Trends in Energy Harvesting from Earth Long-Wave Infrared Emission
Hindawi Publishing Corporation Advances in Materials Science and Engineering Volume 2014, Article ID 252879, 10 pages http://dx.doi.org/10.1155/2014/252879 Review Article New Trends in Energy Harvesting from Earth Long-Wave Infrared Emission Luciano Mescia1 and Alessandro Massaro2 1 Dipartimento di Ingegneria Elettrica e dell’Informazione (DEI), Politecnico di Bari, Via E. Orabona 4, 70125 Bari, Italy 2 Istituto Italiano di Tecnologia (IIT), Center for Biomolecurar Nanotechnologies (CBN), Via Barsanti, 73010 Arnesano, Italy Correspondence should be addressed to Luciano Mescia; [email protected] Received 12 June 2014; Accepted 18 July 2014; Published 11 August 2014 Academic Editor: Andrea Chiappini Copyright © 2014 L. Mescia and A. Massaro. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A review, even if not exhaustive, on the current technologies able to harvest energy from Earth’s thermal infrared emission is reported. In particular, we discuss the role of the rectenna system on transforming the thermal energy, provided by the Sun and reemitted from the Earth, in electricity. The operating principles, efficiency limits, system design considerations, and possible technological implementations are illustrated. Peculiar features of THz and IR antennas, such as physical properties and antenna parameters, are provided. Moreover, some design guidelines for isolated antenna, rectifying diode, and antenna coupled to rectifying diode are exploited. 1. Introduction power generation without increasing environmental pollu- tion [3]. Duringthelast20years,theworldwideenergydemandshave Photovoltaic (PV) conversion is the direct conversion of been strongly increased and as a consequence the deleterious sunlight into electricity without any heat engine to interfere. -

Biconical Antenna
Biconical Antenna AB-900A Features • Frequency Range 25 MHz to 300 MHz • Transmit & Receive Capabilities emissions/immunity applications • Individual Calibration Included per ANSI C63.5 or SAE ARP958 with NIST traceability • Three-year Standard Warranty Description Application The AB-900A is a broadband, linearly polarized Biconical The AB-900A Biconical Antenna is intended for use as Dipole Antenna, operating over the frequency range of an EMI test antenna for qualification-level regulatory 25 MHz to 300 MHz. It can be used as either a receiving compliance measurements (FCC, CE, MIL-STD-461, RTCA antenna (for EMI measurements) or as a transmitting DO-160, FDA, SAE Automotive, etc.). antenna (for immunity tests) for power levels up to 50 The AB-900A can also be used in conjunction with an RF watts. power amplifier (up to 50 watts) to generate RF fields associated with radiated immunity testing. Construction In addition, a pair of AB-900A Biconical Antennas can The antenna elements are constructed using a also be used for Normalized Site Attenuation (NSA) corrosion resistant aluminum, which is powder coated calibrations of Open Area Test Sites (OATS) or Semi- for additional durability. Implemented in the element Anechoic Chambers (SAC) using the Geometry Specific design is a “gamma match” rod, which connects the Correction Factors (GSCF) given in Tables G.1 through element’s center rod to one of the outer elements at G.3 of ANSI C63.5, as its physical dimensions conform to the inside edge of the 90 degree bend. The gamma the minimum and maximum values given in Figure G.1 match is necessary in order to avoid a significant “dip” in of ANSI C63.5 (Dimensions of biconical dipole antennas the antenna’s performance which would otherwise be evaluated for numerical correction). -

Antenna Basics White Paper
Antenna Basics White Paper This white paper describes the basic functionality of antennas. Starting with Hertz's Antenna model followed by a short introduction to the fundamentals of wave propagation, the important general characteristics of an antenna and its associated parameters are explained. A more detailed explanation of the functionality of some selected antenna types concludes this white paper. 01_1e 8GE - White Paper / Dr. C. Rohner 3.2015 Reckeweg M. Table of Contents Table of Contents 1 Introduction ......................................................................................... 3 2 Fundamentals of Wave Propagation ................................................. 5 2.1 Maxwell's Equations .................................................................................................... 5 2.2 Wavelength ................................................................................................................... 6 2.3 Far Field Conditions .................................................................................................... 7 2.4 Free Space Conditions ................................................................................................ 7 2.5 Polarization ................................................................................................................... 8 3 General Antenna Characteristics ...................................................... 9 3.1 Radiation Density........................................................................................................ -

The Recent Advancement in Unmanned Aerial Vehicle Tracking Antenna: a Review
sensors Review The Recent Advancement in Unmanned Aerial Vehicle Tracking Antenna: A Review Anabi Hilary Kelechi 1, Mohammed H. Alsharif 2,* , Damilare Abdulbasit Oluwole 1, Philip Achimugu 3, Osichinaka Ubadike 1, Jamel Nebhen 4, Atayero Aaron-Anthony 5 and Peerapong Uthansakul 6,* 1 Department of Aerospace Engineering, Faculty of Air Engineering, AirForce Institute of Technology, Kaduna 800282, Nigeria; hk.anabi@afit.edu.ng (A.H.K.); damilareoluwole@afit.edu.ng (D.A.O.); ocubadike@afit.edu.ng (O.U.) 2 Department of Electrical Engineering, College of Electronics and Information Engineering, Sejong University, 209 Neungdong-ro, Gwangjin-gu, Seoul 05006, Korea 3 Department of Computer Science, Faculty of Computing, AirForce Institute of Technology, Kaduna 800282, Nigeria; p.achimugu@afit.edu.ng 4 College of Computer Engineering and Sciences, Prince Sattam bin Abdulaziz University, P.O. Box 151, Alkharj 11942, Saudi Arabia; [email protected] 5 Department of Electrical and Information Engineering, Covenant University, Ota 112233, Ogun State, Nigeria; [email protected] 6 School of Telecommunication Engineering, Suranaree University of Technology, Nakhon Ratchasima 30000, Thailand * Correspondence: [email protected] (M.H.A.); [email protected] (P.U.) Abstract: Unmanned aerial vehicle (UAV) antenna tracking system is an electromechanical com- ponent designed to track and steer the signal beams from the ground control station (GCS) to the Citation: Kelechi, A.H.; Alsharif, airborne platform for optimum signal alignment. In a tracking system, an antenna continuously M.H.; Oluwole, D.A.; Achimugu, P.; tracks a moving target and records their position. A UAV tracking antenna system is susceptible Ubadike, O.; Nebhen, J.; to signal loss if omnidirectional antenna is deployed as the preferred design. -
Module 6: Antennas 6.0 Introduction
Module 6: Antennas 6.0 Introduction In chapter 2, the fundamental concepts associated with electromagnetic radiation were examined. In this chapter, basic antenna concepts will be reviewed, and several types of antennas will be examined. In particular, the antennas commonly used in making EMC-related measurements will be emphasized. 6.1 The Radiation Mechanism Antennas produce fields which add in phase at certain points of space. Consider a loop of wire that carries a current. R1 d I 1 D R 2 d I 2 ¡ ¡ Here two elements of current d I 1 and d I 2 are separated by a distance D. The current elements are located at distances R1 and R2, respectively from a distant observation point. If ¢ λ R2-R1 0.1 D ¢ 0.1λ Then the fields produced by the current elements add out of phase, and the amount of radiation is small. However, if £ λ R2-R1 0.1 D £ 0.1λ Then the fields produced by the current elements add in phase, and the amount of radiation is large. -Reception Mechanism Electromagnetic fields which are incident upon an antenna induce currents on the surface of the antenna which deliver power to the antenna load. 6-1 induced current incident field load Z L impedance transmission line antenna 6.2 Radiated Power The power radiated by a distribution of sources is that power which passes through a sphere of infinite radius. This, therefore, is the power which leaves the vicinity of the source system, and never returns. In chapter 2 the time-average Poynting vector was presented ¤ ¤ ¤ 1 P = R e{E × H ∗} 2 At points far from the antenna (the radiation -
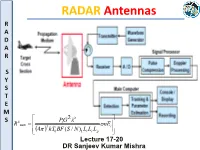
Lecture 17-20: Radar Antennas
RADAR Antennas R A D A R S YS YS TS TE ME 2 2 MS 4 PtG R max nE S 4 3 kT BF (S / N) L L L i 0 1 t r p Lecture 17-20 DR Sanjeev Kumar Mishra Antenna: R • An antenna is A • an electromagnetic radiator, D • a sensor, A • a transducer and R • an impedance matching device • For Radar Application, A directive antenna which concentrates the S energy into a narrow beam. Y • Most popularly used antennas are: Parabolic Reflector Antennas S T • Planar Phased Arrays E • Electronically steered Phased array M antennas S • A typical antenna beamwidth for the detection or tracking of aircraft might be about 1 or 2°. R • An antenna is defined by Webster’s Dictionary as “a usually metallic A device (as a rod or wire) for radiating or receiving radio waves.” D A • The IEEE Standard Definitions [IEEE Std 145–1983]: Antenna (or R aerial) “a means for radiating or receiving radio waves.” S YS YS TS TE ME MS S E & H Fields surrounding an Antenna Antenna as a transition device R A D A R S YS YS Transmission-line Thevenin equivalent of antenna in transmitting mode TS Z A RA jX A TE (R R ) jX ME r L A MS Where ZA : antenna impedance R : Antenna resistance S A Rr : radiation resistance RL :loss resistance (i.e. due to conduction & dielectric losses) XA : equivalent antenna reactance ANTENNA PARAMETERS R • Circuit Parameters A • Input Impedance D • Radiation Resistance A R • Antenna Noise Temperature • Return Loss S • Impedance bandwidth YS • Physical Quantities • Electromagnetic Parameters YS TS • Size • Field Pattern (Beam Area, TE • Weight Directivity, -
Matching Network Elimination in Broadband Rectennas for High-Efficiency Wireless Power Transfer and Energy Harvesting
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2016.2645505, IEEE Transactions on Industrial Electronics IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS Matching Network Elimination in Broadband Rectennas for High-Efficiency Wireless Power Transfer and Energy Harvesting Chaoyun Song, Student Member, IEEE, Yi Huang, Senior Member, IEEE, Jiafeng Zhou, Paul Carter, Sheng Yuan, Qian Xu, and Zhouxiang Fei Abstract— Impedance matching networks for nonlinear I. INTRODUCTION devices such as amplifiers and rectifiers are normally very MPEDANCE matching is a basic but crucial concept in challenging to design, particularly for broadband and multiband devices. A novel design concept for a Ielectronics and electrical engineering, since it can maximize broadband high efficiency rectenna without using the power transfer from a source to a load or minimize the matching networks is presented in this paper for the first signal reflection from a load. In the wireless industry today, time. An off-center-fed dipole antenna with relatively high there have been many devices (such as oscillators, inverters, input impedance over a wide frequency band is proposed. amplifiers, rectifiers, power dividers, boost converters) and The antenna impedance can be tuned to the desired value systems that have a high demand for impedance matching and directly provides a complex conjugate match to the impedance of a rectifier. The received RF power by the networks. A number of techniques for the network design have antenna can be delivered to the rectifier efficiently without been reported [1]–[6].