Lecture 10 Notes, Electromagnetic Theory I Dr
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
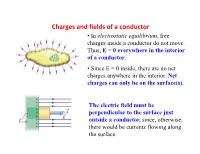
Charges and Fields of a Conductor • in Electrostatic Equilibrium, Free Charges Inside a Conductor Do Not Move
Charges and fields of a conductor • In electrostatic equilibrium, free charges inside a conductor do not move. Thus, E = 0 everywhere in the interior of a conductor. • Since E = 0 inside, there are no net charges anywhere in the interior. Net charges can only be on the surface(s). The electric field must be perpendicular to the surface just outside a conductor, since, otherwise, there would be currents flowing along the surface. Gauss’s Law: Qualitative Statement . Form any closed surface around charges . Count the number of electric field lines coming through the surface, those outward as positive and inward as negative. Then the net number of lines is proportional to the net charges enclosed in the surface. Uniformly charged conductor shell: Inside E = 0 inside • By symmetry, the electric field must only depend on r and is along a radial line everywhere. • Apply Gauss’s law to the blue surface , we get E = 0. •The charge on the inner surface of the conductor must also be zero since E = 0 inside a conductor. Discontinuity in E 5A-12 Gauss' Law: Charge Within a Conductor 5A-12 Gauss' Law: Charge Within a Conductor Electric Potential Energy and Electric Potential • The electrostatic force is a conservative force, which means we can define an electrostatic potential energy. – We can therefore define electric potential or voltage. .Two parallel metal plates containing equal but opposite charges produce a uniform electric field between the plates. .This arrangement is an example of a capacitor, a device to store charge. • A positive test charge placed in the uniform electric field will experience an electrostatic force in the direction of the electric field. -

Maxwell's Equations
Maxwell’s Equations Matt Hansen May 20, 2004 1 Contents 1 Introduction 3 2 The basics 3 2.1 Static charges . 3 2.2 Moving charges . 4 2.3 Magnetism . 4 2.4 Vector operations . 5 2.5 Calculus . 6 2.6 Flux . 6 3 History 7 4 Maxwell’s Equations 8 4.1 Maxwell’s Equations . 8 4.2 Gauss’ law for electricity . 8 4.3 Gauss’ law for magnetism . 10 4.4 Faraday’s law . 11 4.5 Ampere-Maxwell law . 13 5 Conclusion 14 2 1 Introduction If asked, most people outside a physics department would not be able to identify Maxwell’s equations, nor would they be able to state that they dealt with electricity and magnetism. However, Maxwell’s equations have many very important implications in the life of a modern person, so much so that people use devices that function off the principles in Maxwell’s equations every day without even knowing it. 2 The basics 2.1 Static charges In order to understand Maxwell’s equations, it is necessary to understand some basic things about electricity and magnetism first. Static electricity is easy to understand, in that it is just a charge which, as its name implies, does not move until it is given the chance to “escape” to the ground. Amounts of charge are measured in coulombs, abbreviated C. 1C is an extraordi- nary amount of charge, chosen rather arbitrarily to be the charge carried by 6.41418 · 1018 electrons. The symbol for charge in equations is q, sometimes with a subscript like q1 or qenc. -
Electro Magnetic Fields Lecture Notes B.Tech
ELECTRO MAGNETIC FIELDS LECTURE NOTES B.TECH (II YEAR – I SEM) (2019-20) Prepared by: M.KUMARA SWAMY., Asst.Prof Department of Electrical & Electronics Engineering MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Recognized under 2(f) and 12 (B) of UGC ACT 1956 (Affiliated to JNTUH, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India ELECTRO MAGNETIC FIELDS Objectives: • To introduce the concepts of electric field, magnetic field. • Applications of electric and magnetic fields in the development of the theory for power transmission lines and electrical machines. UNIT – I Electrostatics: Electrostatic Fields – Coulomb’s Law – Electric Field Intensity (EFI) – EFI due to a line and a surface charge – Work done in moving a point charge in an electrostatic field – Electric Potential – Properties of potential function – Potential gradient – Gauss’s law – Application of Gauss’s Law – Maxwell’s first law, div ( D )=ρv – Laplace’s and Poison’s equations . Electric dipole – Dipole moment – potential and EFI due to an electric dipole. UNIT – II Dielectrics & Capacitance: Behavior of conductors in an electric field – Conductors and Insulators – Electric field inside a dielectric material – polarization – Dielectric – Conductor and Dielectric – Dielectric boundary conditions – Capacitance – Capacitance of parallel plates – spherical co‐axial capacitors. Current density – conduction and Convection current densities – Ohm’s law in point form – Equation of continuity UNIT – III Magneto Statics: Static magnetic fields – Biot‐Savart’s law – Magnetic field intensity (MFI) – MFI due to a straight current carrying filament – MFI due to circular, square and solenoid current Carrying wire – Relation between magnetic flux and magnetic flux density – Maxwell’s second Equation, div(B)=0, Ampere’s Law & Applications: Ampere’s circuital law and its applications viz. -

How to Introduce the Magnetic Dipole Moment
IOP PUBLISHING EUROPEAN JOURNAL OF PHYSICS Eur. J. Phys. 33 (2012) 1313–1320 doi:10.1088/0143-0807/33/5/1313 How to introduce the magnetic dipole moment M Bezerra, W J M Kort-Kamp, M V Cougo-Pinto and C Farina Instituto de F´ısica, Universidade Federal do Rio de Janeiro, Caixa Postal 68528, CEP 21941-972, Rio de Janeiro, Brazil E-mail: [email protected] Received 17 May 2012, in final form 26 June 2012 Published 19 July 2012 Online at stacks.iop.org/EJP/33/1313 Abstract We show how the concept of the magnetic dipole moment can be introduced in the same way as the concept of the electric dipole moment in introductory courses on electromagnetism. Considering a localized steady current distribution, we make a Taylor expansion directly in the Biot–Savart law to obtain, explicitly, the dominant contribution of the magnetic field at distant points, identifying the magnetic dipole moment of the distribution. We also present a simple but general demonstration of the torque exerted by a uniform magnetic field on a current loop of general form, not necessarily planar. For pedagogical reasons we start by reviewing briefly the concept of the electric dipole moment. 1. Introduction The general concepts of electric and magnetic dipole moments are commonly found in our daily life. For instance, it is not rare to refer to polar molecules as those possessing a permanent electric dipole moment. Concerning magnetic dipole moments, it is difficult to find someone who has never heard about magnetic resonance imaging (or has never had such an examination). -

Gauss' Theorem (See History for Rea- Son)
Gauss’ Law Contents 1 Gauss’s law 1 1.1 Qualitative description ......................................... 1 1.2 Equation involving E field ....................................... 1 1.2.1 Integral form ......................................... 1 1.2.2 Differential form ....................................... 2 1.2.3 Equivalence of integral and differential forms ........................ 2 1.3 Equation involving D field ....................................... 2 1.3.1 Free, bound, and total charge ................................. 2 1.3.2 Integral form ......................................... 2 1.3.3 Differential form ....................................... 2 1.4 Equivalence of total and free charge statements ............................ 2 1.5 Equation for linear materials ...................................... 2 1.6 Relation to Coulomb’s law ....................................... 3 1.6.1 Deriving Gauss’s law from Coulomb’s law .......................... 3 1.6.2 Deriving Coulomb’s law from Gauss’s law .......................... 3 1.7 See also ................................................ 3 1.8 Notes ................................................. 3 1.9 References ............................................... 3 1.10 External links ............................................. 3 2 Electric flux 4 2.1 See also ................................................ 4 2.2 References ............................................... 4 2.3 External links ............................................. 4 3 Ampère’s circuital law 5 3.1 Ampère’s original -

Temporal Analysis of Radiating Current Densities
Temporal analysis of radiating current densities Wei Guoa aP. O. Box 470011, Charlotte, North Carolina 28247, USA ARTICLE HISTORY Compiled August 10, 2021 ABSTRACT From electromagnetic wave equations, it is first found that, mathematically, any current density that emits an electromagnetic wave into the far-field region has to be differentiable in time infinitely, and that while the odd-order time derivatives of the current density are built in the emitted electric field, the even-order deriva- tives are built in the emitted magnetic field. With the help of Faraday’s law and Amp`ere’s law, light propagation is then explained as a process involving alternate creation of electric and magnetic fields. From this explanation, the preceding math- ematical result is demonstrated to be physically sound. It is also explained why the conventional retarded solutions to the wave equations fail to describe the emitted fields. KEYWORDS Light emission; electromagnetic wave equations; current density In electrodynamics [1–3], a time-dependent current density ~j(~r, t) and a time- dependent charge density ρ(~r, t), all evaluated at position ~r and time t, are known to be the sources of an emitted electric field E~ and an emitted magnetic field B~ : 1 ∂2 4π ∂ ∇2E~ − E~ = ~j + 4π∇ρ, (1) c2 ∂t2 c2 ∂t and 1 ∂2 4π ∇2B~ − B~ = − ∇× ~j, (2) c2 ∂t2 c2 where c is the speed of these emitted fields in vacuum. See Refs. [3,4] for derivation of these equations. (In some theories [5], on the other hand, ρ and ~j are argued to arXiv:2108.04069v1 [physics.class-ph] 6 Aug 2021 be responsible for instantaneous action-at-a-distance fields, not for fields propagating with speed c.) Note that when the fields are observed in the far-field region, the contribution to E~ from ρ can be practically ignored [6], meaning that, in that region, Eq. -

Electromagnetic Fields and Energy
MIT OpenCourseWare http://ocw.mit.edu Haus, Hermann A., and James R. Melcher. Electromagnetic Fields and Energy. Englewood Cliffs, NJ: Prentice-Hall, 1989. ISBN: 9780132490207. Please use the following citation format: Haus, Hermann A., and James R. Melcher, Electromagnetic Fields and Energy. (Massachusetts Institute of Technology: MIT OpenCourseWare). http://ocw.mit.edu (accessed [Date]). License: Creative Commons Attribution-NonCommercial-Share Alike. Also available from Prentice-Hall: Englewood Cliffs, NJ, 1989. ISBN: 9780132490207. Note: Please use the actual date you accessed this material in your citation. For more information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms 8 MAGNETOQUASISTATIC FIELDS: SUPERPOSITION INTEGRAL AND BOUNDARY VALUE POINTS OF VIEW 8.0 INTRODUCTION MQS Fields: Superposition Integral and Boundary Value Views We now follow the study of electroquasistatics with that of magnetoquasistat ics. In terms of the flow of ideas summarized in Fig. 1.0.1, we have completed the EQS column to the left. Starting from the top of the MQS column on the right, recall from Chap. 3 that the laws of primary interest are Amp`ere’s law (with the displacement current density neglected) and the magnetic flux continuity law (Table 3.6.1). � × H = J (1) � · µoH = 0 (2) These laws have associated with them continuity conditions at interfaces. If the in terface carries a surface current density K, then the continuity condition associated with (1) is (1.4.16) n × (Ha − Hb) = K (3) and the continuity condition associated with (2) is (1.7.6). a b n · (µoH − µoH ) = 0 (4) In the absence of magnetizable materials, these laws determine the magnetic field intensity H given its source, the current density J. -

Electric Current and Power
Chapter 10: Electric Current and Power Chapter Learning Objectives: After completing this chapter the student will be able to: Calculate a line integral Calculate the total current flowing through a surface given the current density. Calculate the resistance, current, electric field, and current density in a material knowing the material composition, geometry, and applied voltage. Calculate the power density and total power when given the current density and electric field. You can watch the video associated with this chapter at the following link: Historical Perspective: André-Marie Ampère (1775-1836) was a French physicist and mathematician who did ground-breaking work in electromagnetism. He was equally skilled as an experimentalist and as a theorist. He invented both the solenoid and the telegraph. The SI unit for current, the Ampere (or Amp) is named after him, as well as Ampere’s Law, which is one of the four equations that form the foundation of electromagnetic field theory. Photo credit: https://commons.wikimedia.org/wiki/File:Ampere_Andre_1825.jpg, [Public domain], via Wikimedia Commons. 1 10.1 Mathematical Prelude: Line Integrals As we saw in section 5.1, a surface integral requires that we take the dot product of a vector field with a vector that is perpendicular to a specified surface at every point along the surface, and then to integrate the resulting dot product over the surface. Surface integrals must always be a double integral, since they must involve an integral over a two-dimensional surface. We also have a special symbol for a surface integral over a closed surface, such as a sphere or a cube: (Copies of Equations 5.1 and 5.2) While a surface integral requires a double integral to be taken of a dot product over a surface, a line integral requires a single integral to be taken of a dot product over a linear path. -

PHYS 352 Electromagnetic Waves
Part 1: Fundamentals These are notes for the first part of PHYS 352 Electromagnetic Waves. This course follows on from PHYS 350. At the end of that course, you will have seen the full set of Maxwell's equations, which in vacuum are ρ @B~ r~ · E~ = r~ × E~ = − 0 @t @E~ r~ · B~ = 0 r~ × B~ = µ J~ + µ (1.1) 0 0 0 @t with @ρ r~ · J~ = − : (1.2) @t In this course, we will investigate the implications and applications of these results. We will cover • electromagnetic waves • energy and momentum of electromagnetic fields • electromagnetism and relativity • electromagnetic waves in materials and plasmas • waveguides and transmission lines • electromagnetic radiation from accelerated charges • numerical methods for solving problems in electromagnetism By the end of the course, you will be able to calculate the properties of electromagnetic waves in a range of materials, calculate the radiation from arrangements of accelerating charges, and have a greater appreciation of the theory of electromagnetism and its relation to special relativity. The spirit of the course is well-summed up by the \intermission" in Griffith’s book. After working from statics to dynamics in the first seven chapters of the book, developing the full set of Maxwell's equations, Griffiths comments (I paraphrase) that the full power of electromagnetism now lies at your fingertips, and the fun is only just beginning. It is a disappointing ending to PHYS 350, but an exciting place to start PHYS 352! { 2 { Why study electromagnetism? One reason is that it is a fundamental part of physics (one of the four forces), but it is also ubiquitous in everyday life, technology, and in natural phenomena in geophysics, astrophysics or biophysics. -

Ee334lect37summaryelectroma
EE334 Electromagnetic Theory I Todd Kaiser Maxwell’s Equations: Maxwell’s equations were developed on experimental evidence and have been found to govern all classical electromagnetic phenomena. They can be written in differential or integral form. r r r Gauss'sLaw ∇ ⋅ D = ρ D ⋅ dS = ρ dv = Q ∫∫ enclosed SV r r r Nomagneticmonopoles ∇ ⋅ B = 0 ∫ B ⋅ dS = 0 S r r ∂B r r ∂ r r Faraday'sLaw ∇× E = − E ⋅ dl = − B ⋅ dS ∫∫S ∂t C ∂t r r r ∂D r r r r ∂ r r Modified Ampere'sLaw ∇× H = J + H ⋅ dl = J ⋅ dS + D ⋅ dS ∫ ∫∫SS ∂t C ∂t where: E = Electric Field Intensity (V/m) D = Electric Flux Density (C/m2) H = Magnetic Field Intensity (A/m) B = Magnetic Flux Density (T) J = Electric Current Density (A/m2) ρ = Electric Charge Density (C/m3) The Continuity Equation for current is consistent with Maxwell’s Equations and the conservation of charge. It can be used to derive Kirchhoff’s Current Law: r ∂ρ ∂ρ r ∇ ⋅ J + = 0 if = 0 ∇ ⋅ J = 0 implies KCL ∂t ∂t Constitutive Relationships: The field intensities and flux densities are related by using the constitutive equations. In general, the permittivity (ε) and the permeability (µ) are tensors (different values in different directions) and are functions of the material. In simple materials they are scalars. r r r r D = ε E ⇒ D = ε rε 0 E r r r r B = µ H ⇒ B = µ r µ0 H where: εr = Relative permittivity ε0 = Vacuum permittivity µr = Relative permeability µ0 = Vacuum permeability Boundary Conditions: At abrupt interfaces between different materials the following conditions hold: r r r r nˆ × (E1 − E2 )= 0 nˆ ⋅(D1 − D2 )= ρ S r r r r r nˆ × ()H1 − H 2 = J S nˆ ⋅ ()B1 − B2 = 0 where: n is the normal vector from region-2 to region-1 Js is the surface current density (A/m) 2 ρs is the surface charge density (C/m ) 1 Electrostatic Fields: When there are no time dependent fields, electric and magnetic fields can exist as independent fields. -

9 AP-C Electric Potential, Energy and Capacitance
#9 AP-C Electric Potential, Energy and Capacitance AP-C Objectives (from College Board Learning Objectives for AP Physics) 1. Electric potential due to point charges a. Determine the electric potential in the vicinity of one or more point charges. b. Calculate the electrical work done on a charge or use conservation of energy to determine the speed of a charge that moves through a specified potential difference. c. Determine the direction and approximate magnitude of the electric field at various positions given a sketch of equipotentials. d. Calculate the potential difference between two points in a uniform electric field, and state which point is at the higher potential. e. Calculate how much work is required to move a test charge from one location to another in the field of fixed point charges. f. Calculate the electrostatic potential energy of a system of two or more point charges, and calculate how much work is require to establish the charge system. g. Use integration to determine the electric potential difference between two points on a line, given electric field strength as a function of position on that line. h. State the relationship between field and potential, and define and apply the concept of a conservative electric field. 2. Electric potential due to other charge distributions a. Calculate the electric potential on the axis of a uniformly charged disk. b. Derive expressions for electric potential as a function of position for uniformly charged wires, parallel charged plates, coaxial cylinders, and concentric spheres. 3. Conductors a. Understand the nature of electric fields and electric potential in and around conductors. -
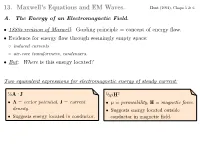
13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A
13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A. The Energy of an Electromagnetic Field. • 1880s revision of Maxwell: Guiding principle = concept of energy flow. • Evidence for energy flow through seemingly empty space: ! induced currents ! air-core transformers, condensers. • But: Where is this energy located? Two equivalent expressions for electromagnetic energy of steady current: ½A J ½µH2 • A = vector potential, J = current • µ = permeability, H = magnetic force. density. • Suggests energy located outside • Suggests energy located in conductor. conductor in magnetic field. 13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A. The Energy of an Electromagnetic Field. • 1880s revision of Maxwell: Guiding principle = concept of energy flow. • Evidence for energy flow through seemingly empty space: ! induced currents ! air-core transformers, condensers. • But: Where is this energy located? Two equivalent expressions for electrostatic energy: ½qψ# ½εE2 • q = charge, ψ = electric potential. • ε = permittivity, E = electric force. • Suggests energy located in charged • Suggests energy located outside object. charged object in electric field. • Maxwell: Treated potentials A, ψ as fundamental quantities. Poynting's account of energy flux • Research project (1884): "How does the energy about an electric current pass from point to point -- that is, by what paths and acording to what law does it travel from the part of the circuit where it is first recognizable as electric and John Poynting magnetic, to the parts where it is changed into heat and other forms?" (1852-1914) • Solution: The energy flux at each point in space is encoded in a vector S given by S = E × H.