Nota Cientifica 07/82 GEOMETRY AS an ASPECT OP DYNAMICS A.L.L
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Philosophy of Physics
The Philosophy of Physics ROBERTO TORRETTI University of Chile PUBLISHED BY THE PRESS SYNDICATE OF THE UNIVERSITY OF CAMBRIDGE The Pitt Building, Trumpington Street, Cambridge, United Kingdom CAMBRIDGE UNIVERSITY PRESS The Edinburgh Building, Cambridge CB2 2RU, UK www.cup.cam.ac.uk 40 West 20th Street, New York, NY 10011-4211, USA www.cup.org 10 Stamford Road, Oakleigh, Melbourne 3166, Australia Ruiz de Alarcón 13, 28014, Madrid, Spain © Roberto Torretti 1999 This book is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 1999 Printed in the United States of America Typeface Sabon 10.25/13 pt. System QuarkXPress [BTS] A catalog record for this book is available from the British Library. Library of Congress Cataloging-in-Publication Data is available. 0 521 56259 7 hardback 0 521 56571 5 paperback Contents Preface xiii 1 The Transformation of Natural Philosophy in the Seventeenth Century 1 1.1 Mathematics and Experiment 2 1.2 Aristotelian Principles 8 1.3 Modern Matter 13 1.4 Galileo on Motion 20 1.5 Modeling and Measuring 30 1.5.1 Huygens and the Laws of Collision 30 1.5.2 Leibniz and the Conservation of “Force” 33 1.5.3 Rømer and the Speed of Light 36 2 Newton 41 2.1 Mass and Force 42 2.2 Space and Time 50 2.3 Universal Gravitation 57 2.4 Rules of Philosophy 69 2.5 Newtonian Science 75 2.5.1 The Cause of Gravity 75 2.5.2 Central Forces 80 2.5.3 Analytical -

Foundations of Newtonian Dynamics: an Axiomatic Approach For
Foundations of Newtonian Dynamics: 1 An Axiomatic Approach for the Thinking Student C. J. Papachristou 2 Department of Physical Sciences, Hellenic Naval Academy, Piraeus 18539, Greece Abstract. Despite its apparent simplicity, Newtonian mechanics contains conceptual subtleties that may cause some confusion to the deep-thinking student. These subtle- ties concern fundamental issues such as, e.g., the number of independent laws needed to formulate the theory, or, the distinction between genuine physical laws and deriva- tive theorems. This article attempts to clarify these issues for the benefit of the stu- dent by revisiting the foundations of Newtonian dynamics and by proposing a rigor- ous axiomatic approach to the subject. This theoretical scheme is built upon two fun- damental postulates, namely, conservation of momentum and superposition property for interactions. Newton’s laws, as well as all familiar theorems of mechanics, are shown to follow from these basic principles. 1. Introduction Teaching introductory mechanics can be a major challenge, especially in a class of students that are not willing to take anything for granted! The problem is that, even some of the most prestigious textbooks on the subject may leave the student with some degree of confusion, which manifests itself in questions like the following: • Is the law of inertia (Newton’s first law) a law of motion (of free bodies) or is it a statement of existence (of inertial reference frames)? • Are the first two of Newton’s laws independent of each other? It appears that -
Stereoscopic Model for Four Dimensions
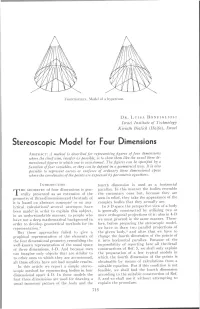
FRONTISPIECIC. Model of a hypercone. DR. LUISA BONFIGLIOLI Israel Institute of Technology K iriath Biahck (Haifa), Israel Stereoscopic Model for Four Dimensions ABSTRACT: A method is described for representing figures of four dimensions where the chief aim, insofar as possible, is to show them like the usual three di mensional figures to which one is accustomed. The figures can be specified by a function offour variables, or they can be defined in a geometrical way. It is also possible to represent curves or surfaces of ordinary three dimensional space where the coordinates of the points are expressed by parametric equ.ations. INTRODUCTION fourth dimension is used as a horizontal HE GEOMETRY of four dimensions is gen parallax. In this manner the bodies resemble T erally presented as an extension of the the customary ones bu t, because they are geometry of three dimensions and the study of seen in relief, they take the appearance of the it is based on abstract conceptsl or on ana complex bodies that they actually are. lytical calculations2 several attempts have In 3-D space the perspective view of a body been made3 in order to explain this subject, is generally constructed by utilizing two or in an understandable manner, to people who more orthogonal projections of it: also in 4-D have not a deep mathematical background in we must proceed in the same manner. There order to develop geometrical methods for its fore, before preparing the steroscopic model, representation 4 we have to draw two parallel projections of But these approaches failed to give a the given body,5 and after that we have to graphical representation of the elements of change the fourth dimension of the points of the four dimensional geometry resembling the it into horizontal parallax. -

On the Origin of the Inertia: the Modified Newtonian Dynamics Theory
CORE Metadata, citation and similar papers at core.ac.uk Provided by Repositori Obert UdL ON THE ORIGIN OF THE INERTIA: THE MODIFIED NEWTONIAN DYNAMICS THEORY JAUME GINE¶ Abstract. The sameness between the inertial mass and the grav- itational mass is an assumption and not a consequence of the equiv- alent principle is shown. In the context of the Sciama's inertia theory, the sameness between the inertial mass and the gravita- tional mass is discussed and a certain condition which must be experimentally satis¯ed is given. The inertial force proposed by Sciama, in a simple case, is derived from the Assis' inertia the- ory based in the introduction of a Weber type force. The origin of the inertial force is totally justi¯ed taking into account that the Weber force is, in fact, an approximation of a simple retarded potential, see [18, 19]. The way how the inertial forces are also derived from some solutions of the general relativistic equations is presented. We wonder if the theory of inertia of Assis is included in the framework of the General Relativity. In the context of the inertia developed in the present paper we establish the relation between the constant acceleration a0, that appears in the classical Modi¯ed Newtonian Dynamics (M0ND) theory, with the Hubble constant H0, i.e. a0 ¼ cH0. 1. Inertial mass and gravitational mass The gravitational mass mg is the responsible of the gravitational force. This fact implies that two bodies are mutually attracted and, hence mg appears in the Newton's universal gravitation law m M F = G g g r: r3 According to Newton, inertia is an inherent property of matter which is independent of any other thing in the universe. -
Newtonian Particles
Newtonian Particles Steve Rotenberg CSE291: Physics Simulation UCSD Spring 2019 CSE291: Physics Simulation • Instructor: Steve Rotenberg ([email protected]) • Lecture: EBU3 4140 (TTh 5:00 – 6:20pm) • Office: EBU3 2210 (TTh 3:50– 4:50pm) • TA: Mridul Kavidayal ([email protected]) • Web page: https://cseweb.ucsd.edu/classes/sp19/cse291-d/index.html CSE291: Physics Simulation • Focus will be on physics of motion (dynamics) • Main subjects: – Solid mechanics (deformable bodies & fracture) – Fluid dynamics – Rigid body dynamics • Additional topics: – Vehicle dynamics – Galactic dynamics – Molecular modeling Programming Project • There will a single programming project over the quarter • You can choose one of the following options – Fracture modeling – Particle based fluids – Rigid body dynamics • Or you can suggest your own idea, but talk to me first • The project will involve implementing the physics, some level of collision detection and optimization, some level of visualization, and some level of user interaction • You can work on your own or in a group of two • You also have to do a presentation for the final and demo it live or show some rendered video • I will provide more details on the web page Grading • There will be two pop quizzes, each worth 5% of the total grade • For the project, you will have to demonstrate your current progress at two different times in the quarter (roughly 1/3 and 2/3 through). These will each be worth 10% of the total grade • The final presentation is worth 10% • The remaining 60% is for the content of the project itself Course Outline 1. Newtonian Particles 10.Poisson Equations 2. -

Modified Newtonian Dynamics
J. Astrophys. Astr. (December 2017) 38:59 © Indian Academy of Sciences https://doi.org/10.1007/s12036-017-9479-0 Modified Newtonian Dynamics (MOND) as a Modification of Newtonian Inertia MOHAMMED ALZAIN Department of Physics, Omdurman Islamic University, Omdurman, Sudan. E-mail: [email protected] MS received 2 February 2017; accepted 14 July 2017; published online 31 October 2017 Abstract. We present a modified inertia formulation of Modified Newtonian dynamics (MOND) without retaining Galilean invariance. Assuming that the existence of a universal upper bound, predicted by MOND, to the acceleration produced by a dark halo is equivalent to a violation of the hypothesis of locality (which states that an accelerated observer is pointwise inertial), we demonstrate that Milgrom’s law is invariant under a new space–time coordinate transformation. In light of the new coordinate symmetry, we address the deficiency of MOND in resolving the mass discrepancy problem in clusters of galaxies. Keywords. Dark matter—modified dynamics—Lorentz invariance 1. Introduction the upper bound is inferred by writing the excess (halo) acceleration as a function of the MOND acceleration, The modified Newtonian dynamics (MOND) paradigm g (g) = g − g = g − gμ(g/a ). (2) posits that the observations attributed to the presence D N 0 of dark matter can be explained and empirically uni- It seems from the behavior of the interpolating function fied as a modification of Newtonian dynamics when the as dictated by Milgrom’s formula (Brada & Milgrom gravitational acceleration falls below a constant value 1999) that the acceleration equation (2) is universally −10 −2 of a0 10 ms . -

Classical Particle Trajectories‡
1 Variational approach to a theory of CLASSICAL PARTICLE TRAJECTORIES ‡ Introduction. The problem central to the classical mechanics of a particle is usually construed to be to discover the function x(t) that describes—relative to an inertial Cartesian reference frame—the positions assumed by the particle at successive times t. This is the problem addressed by Newton, according to whom our analytical task is to discover the solution of the differential equation d2x(t) m = F (x(t)) dt2 that conforms to prescribed initial data x(0) = x0, x˙ (0) = v0. Here I explore an alternative approach to the same physical problem, which we cleave into two parts: we look first for the trajectory traced by the particle, and then—as a separate exercise—for its rate of progress along that trajectory. The discussion will cast new light on (among other things) an important but frequently misinterpreted variational principle, and upon a curious relationship between the “motion of particles” and the “motion of photons”—the one being, when you think about it, hardly more abstract than the other. ‡ The following material is based upon notes from a Reed College Physics Seminar “Geometrical Mechanics: Remarks commemorative of Heinrich Hertz” that was presented February . 2 Classical trajectories 1. “Transit time” in 1-dimensional mechanics. To describe (relative to an inertial frame) the 1-dimensional motion of a mass point m we were taught by Newton to write mx¨ = F (x) − d If F (x) is “conservative” F (x)= dx U(x) (which in the 1-dimensional case is automatic) then, by a familiar line of argument, ≡ 1 2 ˙ E 2 mx˙ + U(x) is conserved: E =0 Therefore the speed of the particle when at x can be described 2 − v(x)= m E U(x) (1) and is determined (see the Figure 1) by the “local depth E − U(x) of the potential lake.” Several useful conclusions are immediate. -

Thomas Aquinas on the Separability of Accidents and Dietrich of Freiberg’S Critique
Thomas Aquinas on the Separability of Accidents and Dietrich of Freiberg’s Critique David Roderick McPike Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for the Doctorate in Philosophy degree in Philosophy Department of Philosophy Faculty of Arts University of Ottawa © David Roderick McPike, Ottawa, Canada, 2015 Abstract The opening chapter briefly introduces the Catholic doctrine of the Eucharist and the history of its appropriation into the systematic rational discourse of philosophy, as culminating in Thomas Aquinas’ account of transubstantiation with its metaphysical elaboration of the separability of accidents from their subject (a substance), so as to exist (supernaturally) without a subject. Chapter Two expounds St. Thomas’ account of the separability of accidents from their subject. It shows that Thomas presents a consistent rational articulation of his position throughout his works on the subject. Chapter Three expounds Dietrich of Freiberg’s rejection of Thomas’ view, examining in detail his treatise De accidentibus, which is expressly dedicated to demonstrating the utter impossibility of separate accidents. Especially in light of Kurt Flasch’s influential analysis of this work, which praises Dietrich for his superior level of ‘methodological consciousness,’ this chapter aims to be painstaking in its exposition and to comprehensively present Dietrich’s own views just as we find them, before taking up the task of critically assessing Dietrich’s position. Chapter Four critically analyses the competing doctrinal positions expounded in the preceding two chapters. It analyses the various elements of Dietrich’s case against Thomas and attempts to pinpoint wherein Thomas and Dietrich agree and wherein they part ways. -

Modified Newtonian Dynamics, an Introductory Review
Modified Newtonian Dynamics, an Introductory Review Riccardo Scarpa European Southern Observatory, Chile E-mail [email protected] Abstract. By the time, in 1937, the Swiss astronomer Zwicky measured the velocity dispersion of the Coma cluster of galaxies, astronomers somehow got acquainted with the idea that the universe is filled by some kind of dark matter. After almost a century of investigations, we have learned two things about dark matter, (i) it has to be non-baryonic -- that is, made of something new that interact with normal matter only by gravitation-- and, (ii) that its effects are observed in -8 -2 stellar systems when and only when their internal acceleration of gravity falls below a fix value a0=1.2×10 cm s . Being completely decoupled dark and normal matter can mix in any ratio to form the objects we see in the universe, and indeed observations show the relative content of dark matter to vary dramatically from object to object. This is in open contrast with point (ii). In fact, there is no reason why normal and dark matter should conspire to mix in just the right way for the mass discrepancy to appear always below a fixed acceleration. This systematic, more than anything else, tells us we might be facing a failure of the law of gravity in the weak field limit rather then the effects of dark matter. Thus, in an attempt to avoid the need for dark matter many modifications of the law of gravity have been proposed in the past decades. The most successful – and the only one that survived observational tests -- is the Modified Newtonian Dynamics. -

Modified Newtonian Dynamics
Faculty of Mathematics and Natural Sciences Bachelor Thesis University of Groningen Modified Newtonian Dynamics (MOND) and a Possible Microscopic Description Author: Supervisor: L.M. Mooiweer prof. dr. E. Pallante Abstract Nowadays, the mass discrepancy in the universe is often interpreted within the paradigm of Cold Dark Matter (CDM) while other possibilities are not excluded. The main idea of this thesis is to develop a better theoretical understanding of the hidden mass problem within the paradigm of Modified Newtonian Dynamics (MOND). Several phenomenological aspects of MOND will be discussed and we will consider a possible microscopic description based on quantum statistics on the holographic screen which can reproduce the MOND phenomenology. July 10, 2015 Contents 1 Introduction 3 1.1 The Problem of the Hidden Mass . .3 2 Modified Newtonian Dynamics6 2.1 The Acceleration Constant a0 .................................7 2.2 MOND Phenomenology . .8 2.2.1 The Tully-Fischer and Jackson-Faber relation . .9 2.2.2 The external field effect . 10 2.3 The Non-Relativistic Field Formulation . 11 2.3.1 Conservation of energy . 11 2.3.2 A quadratic Lagrangian formalism (AQUAL) . 12 2.4 The Relativistic Field Formulation . 13 2.5 MOND Difficulties . 13 3 A Possible Microscopic Description of MOND 16 3.1 The Holographic Principle . 16 3.2 Emergent Gravity as an Entropic Force . 16 3.2.1 The connection between the bulk and the surface . 18 3.3 Quantum Statistical Description on the Holographic Screen . 19 3.3.1 Two dimensional quantum gases . 19 3.3.2 The connection with the deep MOND limit . -

Varying Speed of Light in an Anisotropic Four-Dimensional Space J
VARYING SPEED OF LIGHT IN AN ANISOTROPIC FOUR-DIMENSIONAL SPACE J. C. Pérez Ramos (e-mail: [email protected]) −Simplified version of original paper in Spanish− ABSTRACT: We show how the theory of relativity disagrees with the isotropy of the expanding universe and with the experimental arguments in favour of the existence of a preferred frame. We postulate a new heuristic principle, the invariance of the radius of the universe, deriving new transformation equations. Then we develop the geometric scenario and we prove how the universe equals an anisotropic inhomogeneous hyperboloid in four-space. The new model quite naturally incorporates the expanding universe, solves the cosmological horizon problem, explains the asymmetrical time dilation effect (for example, in the twin paradox) and describes the Big Bang in an original way by reducing the radius of the hypersphere to zero. The speed of light acquires a new geometrical meaning that justifies a varying speed of light (VSL) theory and clarifies unsolved problems in physics as the Pioneer anomaly, cosmological puzzles, the dark energy and the Loschmidt paradox. 1. INTRODUCTION _______________________________________________________________________________________ “The most important result of our reflections is, however, that precisely the apparently simplest mechanical principles are of a very complicated character; that these principles are founded on uncompleted experiences, even on experiences that never can be fully completed; that practically, indeed, they are sufficiently secured, in view of the tolerable stability of our environment, to serve as the foundation of mathematical deduction; but that they can by ho means themselves be regarded as mathematically established truths, but only as principles that not only admit of constant control by experience but actually require it.” Ernst Mach [1] 1.1. -

On the Curves Which Lie on the Quartic Surface in Space of Four Dimensions, and the Correspond
272 MR. HANUMANTA RAO [Dec. 6, ON THE CURVES WHICH LIE ON THE QUARTIC SURFACE IN SPACE OF FOUR DIMENSIONS, AND THE CORRESPOND. ING CURVES ON THE CUBIC SURFACE AND THE QUARTIC WITH A DOUBLE CONIC By C. V. HANUMANTA RAO. [Received October 22nd, 1917.—Read December 6th, 1917.] THE quartic surface in space of three dimensions which has a double conic was discussed by Segre (Math. Annalen, Vol. 24, 1884) as the pro- jection, from an arbitrary point, of the quartic surface F in space of four dimensions which is the intersection of two quadratic varieties in that space. When the centre of projection is taken on F itself, the surface projects into a cubic surface S3- Part I of this paper begins with a short account of some elementary properties relating to four-dimensional space and a brief re"sum6 of the chief properties of F proved by Segre. I then proceed to show how the properties of lines, conies, and cubics on Sd can be deduced from the properties of the corresponding curves on F. But it is found that the cubics on F do not exhaust the cubics on S3. In Part II, I therefore develop a theory of coresiduation on F. This part of the paper follows closely a paper by Prof. Baker (Proc. London Math. Soc, Ser. 2, Vol. 11, 1912). A good deal of this work could have been deduced as a generalisation of the work in Prof. Baker's paper, but a development from first principles was thought preferable. It 13 shown that all curves on F can be expressed in terms of six funda- mental elements.