A Thesis Entitled Security Enhancement of Over-The-Air
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Standard Review Plan 13.6.2 Physical Security
NUREG-0800 U.S. NUCLEAR REGULATORY COMMISSION STANDARD REVIEW PLAN 13.6.2 PHYSICAL SECURITY - DESIGN CERTIFICATION REVIEW RESPONSIBILITIES Primary – Office of Nuclear Security and Incident Response Secondary – None I. AREAS OF REVIEW For design certification (DC) applications, the review involves the evaluation of the physical security program design, to include those physical protection and mitigative measure elements identified to be within the scope of an applicant’s design. The review must include the required physical security elements of a DC application and may also include a review of the voluntarily submitted physical protection and mitigative measure elements. DRAFT - August 2007 USNRC STANDARD REVIEW PLAN This Standard Review Plan, NUREG-0800, has been prepared to establish criteria that the U.S. Nuclear Regulatory Commission staff responsible for the review of applications to construct and operate nuclear power plants intends to use in evaluating whether an applicant/licensee meets the NRC's regulations. The Standard Review Plan is not a substitute for the NRC's regulations, and compliance with it is not required. However, an applicant is required to identify differences between the design features, analytical techniques, and procedural measures proposed for its facility and the SRP acceptance criteria and evaluate how the proposed alternatives to the SRP acceptance criteria provide an acceptable method of complying with the NRC regulations. The standard review plan sections are numbered in accordance with corresponding sections in Regulatory Guide 1.70, "Standard Format and Content of Safety Analysis Reports for Nuclear Power Plants (LWR Edition)." Not all sections of Regulatory Guide 1.70 have a corresponding review plan section. -

Public Awareness and Auto-Theft Prevention: Getting It Right for the Wrong Reason
Security Journal ELSEVIER Security Journal 10 (1998)59-64 Public awareness and auto-theft prevention: getting it right for the wrong reason Richard Wortley*, Rebecca Kane, Frances Gant School of Justice Administration, Griffith University, Brisbane 4111, Australia Received 3 November 1997; revised 26 November 1997; accepted 26 November 1997 Abstract This article reports an evaluation of a public awareness campaign aimed at encouraging the use of car security measures, particularly Vehicle Identification Number (VIN) etching. It was found that the campaign coincided with an immediate reduction in the incidence of auto-theft. However, there did not appear to be any significant change in the behavior of car owners which would account for this reduction. Rather, it seems the reduction in thefts may have come about through an increased perception of risk the campaign generated among potential car thieves. © 1998 Elsevier Science Ireland Ltd. Keywords: Auto-theft prevention; Vehicle identification; Publicity and crime prevention; Police-private sector co-operation 1. Introduction major insurance companies and motorist organiza- tions, developed Project HEAT (Help Eliminate Auto Motor vehicle theft in Australia is widespread, gen- Theft). HEAT was a community awareness campaign erally exceeding figures for foreign industrialized na- whose principle aim was to" encourage the use of tions (Higgins, 1997, p. 4) and over the past decade security devices and, in particular, the etching of the has emerged as one of the nation's fastest growing Vehicle Identification Number (VIN) on car windows. crimes. Domestically, this crime costs the Australian The campaign was state-wide, although there was a community approx. A$l billion annually and, if theft special focus on the south-east corner of the state rates cannot be curbed, costs are destined to inflate in where the population is concentrated and where 73% the future as the cost of automobiles, insurance of all state auto-theft occurs. -

Auto Theft Is BIG Business and Auto Thieves May Want YOUR Vehicle!
Auto Theft is BIG Business and auto thieves may want YOUR vehicle! Protect your vehicle the best you can and join the Watch Your Car Program Most Commonly Stolen Vehicles…Is Yours One of Them? Top 10 Most Commonly Stolen Top 10 Most Commonly Stolen Vehicles for 2008 – Nationwide Vehicles for 2008 – Arizona 1. 1994 Honda Accord 1. 2004 Dodge Ram Pickup 2. 1995 Honda Civic 2. 1994 Honda Accord 3. 1989 Toyota Camry 3. 1995 Honda Civic 4. 1997 Ford F150 4. 1997 Ford F150 Pickup 5. 2004 Dodge Ram Pickup 5. 2003 Ford F250 Pickup 6. 2000 Dodge Caravan 6. 1994 Nissan Sentra 7. 1996 Jeep Cherokee/Grand Cherokee 7. 1990 Toyota Camry 8. 1994 Acura Integra 8. 2006 Ford F350 Pickup 9. 1999 Ford Taurus 9. 2000 Chevrolet 4x2 Pickup 10. 2002 Ford Explorer 10. 2004 Chevrolet Ext Cab 4x2 Pickup Anti-Theft Tips… Professional thieves can steal any car, but make them work for yours. To prevent thefts, the National Insurance Crime Bureau (NICB) recommends “Layered Protection.” The more layers of protection on your vehicle, the more difficult it is to steal. The number of layers your vehicle needs varies depending on your vehicle and geographic location. Your budget and personal preferences should determine which anti-theft device is best for you. Layer #1 – Common Sense An unlocked vehicle with a key in the ignition is an open invitation to any thief, regardless of which anti- theft device you use. The common sense approach to protection is the simplest and most cost- effective way to thwart would-be thieves. -
AUTO THEFT and WINDOW ETCHING Arizona Automobile Theft Authority Recommends a Layered Approach to Auto Theft Protection
AUTO THEFT AND WINDOW ETCHING Arizona Automobile Theft Authority recommends a layered approach to auto theft protection: Layer 1 – Practice Common Sense. Always lock your vehicle and take the keys with you. Never leave your vehicle running and unattended. Park in well-lit areas. Layer 2 – Use Visible and Audible Warning Devices. Enroll in the free watch your car program. Have your vehicle’s VIN etched on windows. Use a steering wheel or brake lock. Install an audible alarm. Layer 3 – Use Immobilizing Devices. Install a kill switch. Use starter, ignition, fuel disablers, or a smart key. Layer 4 – Use a Tracking Device. They emit a signal to police or monitoring stations when vehicles are stolen. These devices are effective in helping law enforcement recover stolen vehicles. Automobile Window Etching V.I.N. etching is the process of permanently etching your vehicle's seventeen (17) digit vehicle identification number on each piece of glass window on the vehicle. Etching your vehicle's V.I.N. serves as a permanent fingerprint of your vehicle. It is considered an effective deterrent against auto theft. When a vehicle is stolen, the thief must change the identity of the vehicle by changing the V.I.N. plate on the dashboard or else risk being discovered by law enforcement. With a new V.I.N. plate, the thief now has a "new" vehicle, but if the V.I.N. is etched on the windows, the thief must dispose of and replace all windows, which is costly and time consuming. As the thief contemplates stealing your car, he/she will notice the glass etching and may move on to an easier target vehicle. -

Standards for Building Materials, Equipment and Systems Used in Detention and Correctional Facilities
NATIONAL INSTITUTE OF STANDARDS & TECHNOLOGY Research Information Center Gaithersburg, MD 20890 PUBLICATIONS NBSIR 87-3687 Standards for Building Materials, Equipment and Systems Used in Detention and Correctional Facilities Robert D. Dikkers Belinda C. Reeder U.S. DEPARTMENT OF COMMERCE National Bureau of Standards National Engineering Laboratory Center for Building Technology Building Environment Division Gaithersburg, MD 20899 November 1987 Prepared for: -QC ment of Justice 100 ititute of Corrections i, DC 20534 . U56 87-3687 1987 C . 2 Research Information Center National Bureau of Standards Gaithersburg, Maryland NBSIR 87-3687 20899 STANDARDS FOR BUILDING MATERIALS, EQUIPMENT AND SYSTEMS USED IN u - DETENTION AND CORRECTIONAL FACILITIES Robert D. Dikkers Belinda C. Reeder U.S. DEPARTMENT OF COMMERCE National Bureau of Standards National Engineering Laboratory Center for Building Technology Building Environment Division Gaithersburg, MD 20899 November 1987 Prepared for: U.S. Department of Justice National Institute of Corrections Washington, DC 20534 U.S. DEPARTMENT OF COMMERCE, C. William Verity, Secretary NATIONAL BUREAU OF STANDARDS, Ernest Ambler, Director TABLE OF CONTENTS Page Preface . vi Acknowledgements vii Executive Summary ix I . INTRODUCTION 1 A. Background , 1 B. Objectives and Scope of NBS Study 3 II. FACILITY DESIGN AND CONSTRUCTION 6 A. Facility Development Process 6 1 . Needs Assessment ........................................ 6 2 . Master Plan 6 3 . Mission Statement . 6 4. Architectural Program 7 5. Schematic Design and Design Development 7 6 . Construction 9 B. Security Levels 10 C . ACA S tandar ds 13 . III MATERIALS , EQUIPMENT AND SYSTEMS .... 14 A. Introduction 14 B. Performance Problems 15 C. Available Standards/Guide Specifications 20 iii TABLE OF CONTENTS (continued) 5 Page D« Perimeter Systems 21 1 . -

Security Industry Monitor March 2014
Security Industry Monitor March 2014 For additional information on our Security Team, please contact: John E. Mack III Co-head, Investment Banking Group Head of Mergers and Acquisitions (310) 246-3705 [email protected] Michael McManus Managing Director, Investment Banking Group (310) 246-3702 [email protected] PLEASE SEE IMPORTANT DISCLOSURES ON LAST PAGE About Imperial Capital, LLC Imperial Capital is a full-service investment bank offering a uniquely integrated platform of comprehensive services to institutional investors and middle market companies. We offer sophisticated sales and trading services to institutional investors and a wide range of investment banking advisory, capital markets and restructuring services to middle market corporate clients. We also provide proprietary research across an issuer’s capital structure, including bank debt, debt securities, hybrid securities, preferred and common equity and special situations claims. Our comprehensive and integrated service platform, expertise across the full capital structure, and deep industry sector knowledge enable us to provide clients with superior advisory services, capital markets insight, investment ideas and trade execution. We are quick to identify opportunities under any market conditions and we have a proven track record of offering creative, proprietary solutions to our clients. Imperial Capital’s expertise includes the following sectors: Aerospace, Defense & Government Services, Airlines & Transportation, Business Services, Consumer, Energy (Clean Energy and Traditional Energy), Financial Services, Gaming & Leisure, General Industrials, Healthcare, Homebuilding & Real Estate, Media & Telecommunications, Security & Homeland Security and Technology. Imperial Capital has three principal businesses: Investment Banking, Institutional Sales & Trading and Institutional Research. For additional information, please visit our Web site at www.imperialcapital.com. -

Turkish Journal of Computer and Mathematics Education Vol.12 No
Turkish Journal of Computer and Mathematics Education Vol.12 No. 11 (2021), 6007-6011 Research Article Image Classification For Visitors Home Security 1K.B Sri Sathya, 2Archana V, 1Assistant Professor, Dept. of CSE,[email protected] 2Deevika K, Hariharan A, Final year CSE, [email protected] [email protected] [email protected] KPR Institute of Engineering and Technology. Article History: Received: 11 January 2021; Revised: 12 February 2021; Accepted: 27 March 2021; Published online: 10 May 2021 Abstract-The actual need of the today’s organizations and residential areas is security frameworks. The security methods which were implemented on those areas are now frequently facing major issues like break-in burglar easily. And also, the major obstacle with home security is people who are being incautious about the visitors or intruders before opening the door while security alarm goes off unfortunately. As a result, to attain the desired security, there will be an additional need of particularly skilled personnel to increase the level of safety frameworks. As a human being, those personnel will likely make faults which leads to uncertainty of persons entering into the residential zones. The main motive of the project is to provide the better home security against potential harm made by intruders and unknown visitors by recognizing them with predictable accuracy. This security system consists of hardware part and software part. The image capturing is done by camera which comes under hardware part, whereas face detection, face recognition and voice notification are all will be done based on algorithms under software part. Keywords: Facial Detection and Recognition, Feature extraction, FaceNet, Home Security, SVM 1. -

Car Thieves Take the Bait Car Thieves
Car Thieves Take the Bait April 24, 2007 SHARE THIS DOWNLOAD TO PDF Modesto, CA Records Dramatic Vehicle Theft Reduction; Las Vegas, NV Now Ranks as Country's Number One Metro Area With Highest Theft Rate NICB - National Insurance Crime Bureau Contact: Frank Scafidi 916.979.7025 [email protected] Des Plaines, IL, April 24, 2007 - The National Insurance Crime Bureau (NICB) reported today that after three consecutive years as the area with the worst per capita vehicle theft rate in the nation, Modesto, CA has fallen into the number five position-a dramatic improvement. Taking over the "Number One Hot Spot" is Las Vegas, NV. As in 2005, the western United States still ranks as the area of the country with the highest auto theft rates. All of the nation's top ten areas are in the west with five of them in California. For 2006, the ten metropolitan statistical areas with the highest vehicle theft rates are: 1. Las Vegas/Paradise, NV 2. Stockton, CA 3. Visalia/Porterville, CA 4. Phoenix/Mesa/Scottsdale, AZ 5. Modesto, CA 6. Seattle/Tacoma/Bellevue, WA 7. Sacramento/Arden-Arcade/Roseville, CA 8. Fresno, CA 9. Yakima, WA 10. Tucson, AZ According to Hot Spots, its annual report on auto theft rates, NICB reviewed data supplied by the National Crime Information Center (NCIC) for each of the nation's 361 Metropolitan Statistical Areas (MSAs). MSAs are designated by the Office of Management and Budget and may include areas surrounding a specific city. The rate is determined by the number of vehicle theft offenses per 100,000 inhabitants using the 2005 U.S. -

Self-Charging Hybrid
SELF-CHARGING HYBRID JOB NO: 418272 CLIENT: Lexus CAMPAIGN: LS GBNGL LS420 VB Brochure PROOF NO: 03 PUBLICATION: Brochure INSERTION DATE: 00.00.20 View Offers View 01. BRAVE DESIGN 02. IMAGINATIVE 03. TAKUMI 04. EXHILARATING TECHNOLOGY CRAFTSMANSHIP PERFORMANCE What’s the story behind the pioneering When technology anticpates your Mix origami with a car design For the ultimate luxury driving design of Lexus LS? needs before you do - welcome to and prepare to see simplicity and experience, LS combines art and the concept of Omotenashi. sophistication in perfect form. science. Pages 04-07 Pages 08-15 Pages 16-19 Pages 20-21 Build Your LS Build Your “Welcome to the LS, flagship of the Lexus brand. Rather than being bound by the conventions that had defined luxury cars in the past, we aimed to create a car with an innovative and intensely emotional appeal. Its arrival is sure to set a new standard for premium cars in the future.” 05. SELF-CHARGING 06. GRADE LINE-UP 07. FEATURES & 08. F SPORT LS CHIEF ENGINEER HYBRID ACCESSORIES TOSHIO ASAHI Discover the benefits of combining a Which LS will best suit your needs Discover the remarkable level of For an even more dynamic experience, multi-stage shift device to a 3.5-litre and lifestyle? standard and optional features, along discover the F SPORT. V6 self-charging hybrid powertrain. with a range of accessories. Page 22-25 Pages 26-27 Pages 28-37 Pages 38-39 Find a Centre 09. COLOURS AND 10. EQUIPMENT AND 11. ADDITIONAL BENEFITS 12. THE LEXUS EXPERIENCE INTERIOR TRIMS TECHNICAL DATA Select your favourite exterior and LS comes with a wide range of Owning a Lexus comes with many Learn how we aim to treat every interior colour that will welcome you equipment as standard. -
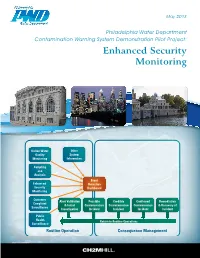
Enhanced Security Monitoring
May 2013 Philadelphia Water Department Contamination Warning System Demonstration Pilot Project: Enhanced Security Monitoring Online Water Other Quality System Monitoring Information Sampling and Analysis Event Enhanced Detection Security Dashboard Monitoring Customer Alert Validation Possible Credible Confirmed Remediation Complaint & Initial Contamination Contaimination Contamination & Recovery of Surveillance Investigation Incident Incident Incident Incident Public Health Return to Routine Operations Surveillance Routine Operation Consequence Management WBG012313172402PHL EPA Disclaimer Although the information in this document has been funded wholly or in part by the United States Environmental Protection Agency under the Water Security Initiative program, it may not necessarily reflect the views of the agency and no official endorsement should be inferred. When referencing this white paper in another document, please use the following citation: Philadelphia Water Department and CH2M HILL. May 2013. Philadelphia Water Department Contamination Warning System Demonstration Pilot Project: Enhanced Security Monitoring. White Paper Submitted to EPA as part of the Water Security Initiative Grant Awarded to Philadelphia Water Department. This paper can also be downloaded from www.ch2mhill.com/iws. ii Acknowledgments The Philadelphia Water Department would like to recognize the following individuals and organizations for their assistance and contributions in the development of this document: EPA Water Security Division Brian Pickard, PE, -
Pipeline Security Smart Practices
PIPELINE SECURITY SMART PRACTICES PIPELINE SECURITY TRANPORTATION SECTOR NETWORK MANAGEMENT (TSNM) AUGUST 2006 EXECUTIVE SUMMARY U.S. hazardous liquids and natural gas pipelines are critical to the nation’s commerce and economy and, as a consequence, they can be attractive targets for terrorists. Before September 11, 2001, safety concerns took precedence over physical and operational security concerns for a majority of pipeline operators. Security matters were mainly limited to prevention of minor theft and vandalism. The terrorist attacks of 9/11 forced a thorough reconsideration of security, especially with respect to critical infrastructure and key resources. Pipeline operators have responded by seeking effective ways to incorporate security practices and programs into overall business operations. The Transportation Security Administration (TSA) Pipeline Security Office examines the state of security in the pipeline industry, most notably through its Corporate Security Review (CSR) program. A CSR encompasses an on-site review of a pipeline operator’s security planning and the implementation of those plans. Program goals include developing first-hand knowledge of security measures in place at critical pipeline sites, establishing and maintaining working relationships with key pipeline security personnel, and identifying and sharing smart security practices observed at individual facilities. The “Pipeline Security Smart Practices” reflect the application of data collected from CSRs conducted since the inception of the program in the -

Security Industry Monitor (Dec 2018)
Security Industry Monitor Executive Summary Security Industry Monitor December 2018 For additional information on our Security Team, please contact: John E. Mack III Co-head, Investment Banking Group Head of Mergers and Acquisitions (310) 246-3705 [email protected] Bill Lynch Managing Director, Investment Banking Group (310) 246-3789 [email protected] Rick Juarez Managing Director, Investment Banking Group (415) 615-4002 [email protected] Koby L. Tanzer, CFA Head of Israel Office Imperial Capital Israel, Ltd. +972 (54) 720 0999 [email protected] PLEASE SEE IMPORTANT DISCLOSURES ON LAST PAGE September 2009 1 Security Industry Monitor Table of Contents About Imperial Capital, LLC Imperial Capital is a full-service investment bank offering a uniquely integrated platform of comprehensive services to institutional investors and middle market companies. We offer sophisticated sales and trading services to institutional investors and a wide range of investment banking advisory, capital markets and restructuring services to middle market corporate clients. We also provide proprietary research across an issuer’s capital structure, including bank debt, debt securities, hybrid securities, preferred and common equity and special situations claims. Our comprehensive and integrated service platform, expertise across the full capital structure, and deep industry sector knowledge enable us to provide clients with superior advisory services, capital markets insight, investment ideas and trade execution. We are quick to identify opportunities under any market conditions and we have a proven track record of offering creative, proprietary solutions to our clients. Imperial Capital’s expertise includes the following sectors: Aerospace, Defense & Government Services, Airlines & Transportation, Business Services, Consumer, Energy (Clean Energy and Traditional Energy), Financial Services, Gaming & Leisure, General Industrials, Healthcare, Homebuilding & Real Estate, Media & Entertainment, Security & Homeland Security and Technology.