Modelling Β Pictoris' Pulsations to Weigh Its Giant Planet
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Exep Science Plan Appendix (SPA) (This Document)
ExEP Science Plan, Rev A JPL D: 1735632 Release Date: February 15, 2019 Page 1 of 61 Created By: David A. Breda Date Program TDEM System Engineer Exoplanet Exploration Program NASA/Jet Propulsion Laboratory California Institute of Technology Dr. Nick Siegler Date Program Chief Technologist Exoplanet Exploration Program NASA/Jet Propulsion Laboratory California Institute of Technology Concurred By: Dr. Gary Blackwood Date Program Manager Exoplanet Exploration Program NASA/Jet Propulsion Laboratory California Institute of Technology EXOPDr.LANET Douglas Hudgins E XPLORATION PROGRAMDate Program Scientist Exoplanet Exploration Program ScienceScience Plan Mission DirectorateAppendix NASA Headquarters Karl Stapelfeldt, Program Chief Scientist Eric Mamajek, Deputy Program Chief Scientist Exoplanet Exploration Program JPL CL#19-0790 JPL Document No: 1735632 ExEP Science Plan, Rev A JPL D: 1735632 Release Date: February 15, 2019 Page 2 of 61 Approved by: Dr. Gary Blackwood Date Program Manager, Exoplanet Exploration Program Office NASA/Jet Propulsion Laboratory Dr. Douglas Hudgins Date Program Scientist Exoplanet Exploration Program Science Mission Directorate NASA Headquarters Created by: Dr. Karl Stapelfeldt Chief Program Scientist Exoplanet Exploration Program Office NASA/Jet Propulsion Laboratory California Institute of Technology Dr. Eric Mamajek Deputy Program Chief Scientist Exoplanet Exploration Program Office NASA/Jet Propulsion Laboratory California Institute of Technology This research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration. © 2018 California Institute of Technology. Government sponsorship acknowledged. Exoplanet Exploration Program JPL CL#19-0790 ExEP Science Plan, Rev A JPL D: 1735632 Release Date: February 15, 2019 Page 3 of 61 Table of Contents 1. -

Astronomy 2015 Sample Test.Pdf
Science Olympiad Astronomy C Division Event Sample Exam Stellar Evolution: Star and Planet Formation 2014-2015 Team Number: Team Name: Instructions: 1) Please turn in all materials at the end of the event. 2) Do not forget to put your team name and team number at the top of all answer pages. 3) Write all answers on the answer pages. Any marks elsewhere will not be scored. 4) All quantitative answers are expected to have a precision of 3 or more significant figures. 5) Please do not access the internet during the event. If you do so, your team will be disqualified. 6) This test was downloaded from: www.aavso.org/science-olympiad-2015. 7) Good luck! And may the stars be with you! 1 Section A: Use Image/Illustration Set A to answer Questions 1-19. This section focuses on qualitative understanding of stellar evolution, specifically relating to star formation and planets. 1. A schematic of a T-Tauri star is shown in Image A1. (a) Which point (A-F) marks the location of the disk surrounding the protostar? (b) Which point (A-F) displays the bipolar outflow that may form Herbig-Haro objects? (c) Which point (A-F) shows the strongly variable hot spots on the protostar? 2. A color-magnitude diagram for a sample of brown dwarfs is shown in Image A2. The x-axis shows the J-K color index, while the y-axis displays J-band magnitude. The different colors represent different brown dwarf spectral types. (a) Which lettered region (A-D) corresponds approximately to a spectral type L2 brown dwarf? (b) Which lettered region (A-D) corresponds approximately to a spectral type T6 brown dwarf? (c) Which lettered region (A-D) corresponds approximately to the brown dwarf L-T type transition? 3. -

LIST of PUBLICATIONS Aryabhatta Research Institute of Observational Sciences ARIES (An Autonomous Scientific Research Institute
LIST OF PUBLICATIONS Aryabhatta Research Institute of Observational Sciences ARIES (An Autonomous Scientific Research Institute of Department of Science and Technology, Govt. of India) Manora Peak, Naini Tal - 263 129, India (1955−2020) ABBREVIATIONS AA: Astronomy and Astrophysics AASS: Astronomy and Astrophysics Supplement Series ACTA: Acta Astronomica AJ: Astronomical Journal ANG: Annals de Geophysique Ap. J.: Astrophysical Journal ASP: Astronomical Society of Pacific ASR: Advances in Space Research ASS: Astrophysics and Space Science AE: Atmospheric Environment ASL: Atmospheric Science Letters BA: Baltic Astronomy BAC: Bulletin Astronomical Institute of Czechoslovakia BASI: Bulletin of the Astronomical Society of India BIVS: Bulletin of the Indian Vacuum Society BNIS: Bulletin of National Institute of Sciences CJAA: Chinese Journal of Astronomy and Astrophysics CS: Current Science EPS: Earth Planets Space GRL : Geophysical Research Letters IAU: International Astronomical Union IBVS: Information Bulletin on Variable Stars IJHS: Indian Journal of History of Science IJPAP: Indian Journal of Pure and Applied Physics IJRSP: Indian Journal of Radio and Space Physics INSA: Indian National Science Academy JAA: Journal of Astrophysics and Astronomy JAMC: Journal of Applied Meterology and Climatology JATP: Journal of Atmospheric and Terrestrial Physics JBAA: Journal of British Astronomical Association JCAP: Journal of Cosmology and Astroparticle Physics JESS : Jr. of Earth System Science JGR : Journal of Geophysical Research JIGR: Journal of Indian -

Fundamental Stellar Astrophysics Revealed at Very High Angular Resolution
Fundamental Stellar Astrophysics Revealed at Very High Angular Resolution Contact: Jason Aufdenberg (386) 226-7123 Embry-Riddle Aeronautical University, Physical Sciences Department [email protected] Co-authors: Stephen Ridgway (National Optical Astronomy Observatory) Russel White (Georgia State University) Fundamental Stellar Astrophysics Revealed at Very High Angular Resolution 1 Introduction A detailed understanding of stellar structure and evolution is vital to all areas of astrophysics. In exoplanet studies the age and mass of a planet are known only as well as the age and mass of the hosting star, mass transfer in intermediate mass binary systems lead to type Ia Su- pernova that provide the strictest constraints on the rate of the universe’s acceleration, and massive stars with low metallicity and rapid rotation are a favored progenitor for the most luminous events in the universe, long duration gamma ray bursts. Given this universal role, it is unfortunate that our understanding of stellar astrophysics is severely limited by poorly determined basic stellar properties - effective temperatures are in most cases still assigned by blunt spectral type classifications and luminosities are calculated based on poorly known distances. Moreover, second order effects such as rapid rotation and metallicity are ignored in general. Unless more sophisticated techniques are developed to properly determine funda- mental stellar properties, advances in stellar astrophysics will stagnate and inhibit progress in all areas of astrophysics. Fortunately, over the next decade there are a number of observa- tional initiatives that have the potential to transform stellar astrophysics to a high-precision science. Ultra-precise space-based photometry from CoRoT (2007+) and Kepler (2009+) will provide stellar seismology for the structure and mass determination of single stars. -

The Electrical Experimenter 529
Ksectio:),_ Lqui7en AN ELECTRO - GYRO - CRUISER. SEE PAGE 54 2 www.americanradiohistory.com ADE (ISOLATORS 1,00010 I;000,0110 VOLTS Employed -by U. S. NAVY r MARK. and all the Commercial Wireless RED. U.S. PAT. OFF. & FOREIGN COUNTRIES. Telegraph Companies ' INSULATION LOUIS STEINBERGER'S PATENTS rtai© ©401116t "' 4500 -1.509 450S 4517 u.%aóiá/iij 6350 <4ij%'.7/j 6977 A ss 68 :13 7370 6..52 SOLE MANUFACTURERS 66-76 Front St. BROOKLYN, N. Y. 60 -72 Washington St. AMERICA NEW PRICES Effective January 15, 1916. All previous prices void. _01111111111111111111111111111 1111 II111111111111111111111111111111_` 13' s' Cut shows Ih, The Brandes Switch Contact nts "Superior " Type Trans - Atlantic Brandes Head Type Receivers We are in a position to furnish Set. Price, com- (price $9) are prompt shipment of the follow- plete with ger- Used in the = ing sizes of switch points: luan silver head- Eiffel Tower to take 6 -32 screw. band, $5. Station, Paris. Tapped No. Diam. Height Doz. 50 100 626..34 inch 0 inch $ 30 $1.00 $1.75 "Astonished at its Value for the Money" 628..% inch g inch .30 .90 1.50 With 34 inch shank threaded 6 -32 627..34 inch / inch $.36 $1.25 $2.00 THAT'S what hundreds of purchasers of our "Supe- Nickel points 50 per cent. advance. rior" Receivers have said. Postage extra. "The best receiver sold at $5 to -day" is what dealers tell us. The value comes in the perfectly matched tone; in the The "Albany "Combination Detector strong, rigid -yet light- construction; in the unusually handsome finish. -

Abstracts of Extreme Solar Systems 4 (Reykjavik, Iceland)
Abstracts of Extreme Solar Systems 4 (Reykjavik, Iceland) American Astronomical Society August, 2019 100 — New Discoveries scope (JWST), as well as other large ground-based and space-based telescopes coming online in the next 100.01 — Review of TESS’s First Year Survey and two decades. Future Plans The status of the TESS mission as it completes its first year of survey operations in July 2019 will bere- George Ricker1 viewed. The opportunities enabled by TESS’s unique 1 Kavli Institute, MIT (Cambridge, Massachusetts, United States) lunar-resonant orbit for an extended mission lasting more than a decade will also be presented. Successfully launched in April 2018, NASA’s Tran- siting Exoplanet Survey Satellite (TESS) is well on its way to discovering thousands of exoplanets in orbit 100.02 — The Gemini Planet Imager Exoplanet Sur- around the brightest stars in the sky. During its ini- vey: Giant Planet and Brown Dwarf Demographics tial two-year survey mission, TESS will monitor more from 10-100 AU than 200,000 bright stars in the solar neighborhood at Eric Nielsen1; Robert De Rosa1; Bruce Macintosh1; a two minute cadence for drops in brightness caused Jason Wang2; Jean-Baptiste Ruffio1; Eugene Chiang3; by planetary transits. This first-ever spaceborne all- Mark Marley4; Didier Saumon5; Dmitry Savransky6; sky transit survey is identifying planets ranging in Daniel Fabrycky7; Quinn Konopacky8; Jennifer size from Earth-sized to gas giants, orbiting a wide Patience9; Vanessa Bailey10 variety of host stars, from cool M dwarfs to hot O/B 1 KIPAC, Stanford University (Stanford, California, United States) giants. 2 Jet Propulsion Laboratory, California Institute of Technology TESS stars are typically 30–100 times brighter than (Pasadena, California, United States) those surveyed by the Kepler satellite; thus, TESS 3 Astronomy, California Institute of Technology (Pasadena, Califor- planets are proving far easier to characterize with nia, United States) follow-up observations than those from prior mis- 4 Astronomy, U.C. -

The CORALIE Survey for Southern Extra-Solar Planets IX. a 1.3-Day
Astronomy & Astrophysics manuscript no. (will be inserted by hand later) The CORALIE survey for southern extra-solar planets⋆ IX. A 1.3-day period brown dwarf disguised as a planet N.C. Santos1, M. Mayor1, D. Naef1, F. Pepe1, D. Queloz1, S. Udry1, M. Burnet1, J.V. Clausen2, B.E. Helt2, E.H. Olsen2, and J.D. Pritchard3 1 Observatoire de Gen`eve, 51 ch. des Maillettes, CH–1290 Sauverny, Switzerland 2 Niels Bohr Institute for Astronomy, Physics, and Geophysics; Astronomical Observatory, Juliane Maries Vej 30, DK-2100 Copenhagen Ø, Denmark 3 European Southern Observatory, Santiago, Chile Received / Accepted Abstract. In this article we present the case of HD 41004 AB, a system composed of a K0V star and a 3.7- magnitude fainter M-dwarf companion. We have obtained 86 CORALIE spectra of this system with the goal of obtaining precise radial-velocity measurements. Since HD 41004 A and B are separated by only 0.5′′, in every spectrum taken for the radial-velocity measurement, we are observing the blended spectra of the two stars. An analysis of the measurements has revealed a velocity variation with an amplitude of about 50 m s−1 and a periodicity of 1.3 days. This radial-velocity signal is consistent with the expected variation induced by the presence of a companion to either HD 41004 A or HD 41004 B, or to some other effect due to e.g. activity related phenomena. In particular, such a small velocity amplitude could be the signature of the presence of a very low mass giant planetary companion to HD 41004 A, whose light dominates the spectra. -
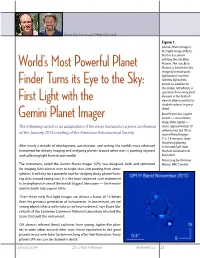
First Light with the Gemini Planet Imager
Bruce Macintosh and Peter Michaud Figure 1. Gemini Planet Imager’s first light image of Beta Pictoris b, a planet orbiting the star Beta Pictoris. The star, Beta World’s Most Powerful Planet Pictoris, is blocked in this image by a mask so its light doesn’t interfere with the light of the Finder Turns its Eye to the Sky: planet. In addition to the image, GPI obtains a spectrum from every pixel element in the field-of- First Light with the view to allow scientists to study the planet in great detail. Beta Pictoris b is a giant Gemini Planet Imager planet — several times larger than Jupiter — The following article is an adaptation of the news featured in a press conference and is approximately 10 million years old. These at the January 2014 meeting of the American Astronomical Society. near-infrared images (1.5-1.8 microns) show the planet glowing After nearly a decade of development, construction, and testing, the world’s most advanced in infrared light from instrument for directly imaging and analyzing planets around other stars is pointing skyward the heat released in its and collecting light from distant worlds. formation. Processing by Christian The instrument, called the Gemini Planet Imager (GPI), was designed, built, and optimized Marois, NRC Canada. for imaging faint planets next to bright stars and probing their atmo- spheres. It will also be a powerful tool for studying dusty, planet-form- ing disks around young stars. It is the most advanced such instrument to be deployed on one of the world’s biggest telescopes — the 8-meter Gemini South telescope in Chile. -

A Comprehensive Dust Model Applied to the Resolved Beta Pictoris Debris Disk from Optical to Radio Wavelengths
Accepted for publication in ApJ Preprint typeset using LATEX style AASTeX6 v. 1.0 A COMPREHENSIVE DUST MODEL APPLIED TO THE RESOLVED BETA PICTORIS DEBRIS DISK FROM OPTICAL TO RADIO WAVELENGTHS Nicholas P. Ballering, Kate Y. L. Su, George H. Rieke, Andras´ Gasp´ ar´ Steward Observatory, University of Arizona, 933 North Cherry Avenue, Tucson, AZ 85721, USA ABSTRACT We investigate whether varying the dust composition (described by the optical constants) can solve a persistent problem in debris disk modeling|the inability to fit the thermal emission without over- predicting the scattered light. We model five images of the β Pictoris disk: two in scattered light from HST /STIS at 0.58 µm and HST /WFC3 at 1.16 µm, and three in thermal emission from Spitzer/MIPS at 24 µm, Herschel/PACS at 70 µm, and ALMA at 870 µm. The WFC3 and MIPS data are published here for the first time. We focus our modeling on the outer part of this disk, consisting of a parent body ring and a halo of small grains. First, we confirm that a model using astronomical silicates cannot simultaneously fit the thermal and scattered light data. Next, we use a simple, generic function for the optical constants to show that varying the dust composition can improve the fit substantially. Finally, we model the dust as a mixture of the most plausible debris constituents: astronomical silicates, water ice, organic refractory material, and vacuum. We achieve a good fit to all datasets with grains composed predominantly of silicates and organics, while ice and vacuum are, at most, present in small amounts. -
A1 F2015 Review Copy.Key
Review Astronomy 1 — Elementary Astronomy LA Mission College Spring F2015 Quotes & Cartoon of the Day “One may wonder, What came before? If space-time did not exist then, how could everything appear from nothing? . Explaining this initial singularity—where and when it all began—still remains the most intractable problem of modern cosmology. — Andrei Linde “But who shall dwell in these worlds if they be inhabited? ... Are we or they Lords of the World? ... And how are all things made for man?” — Johannes Kepler “Our sun is one of 100 billion stars in our galaxy. Our galaxy is one of billions of galaxies populating the universe. It would be the height of presumption to think that we are the only living things in that enormous immensity.” — Wernher von Braun Astronomy 1 - Elementary Astronomy LA Mission College Levine F2015 Announcements • Observing Project & Extra Credit Due • Midterm graded & gradebook updated to drop lowest • remainder of grading (hopefully) updated this weekend • Final 12/15 at 10-12 AM! Astronomy 1 - Elementary Astronomy LA Mission College Levine F2015 Last Class • Debrief Midterm • Debrief LT • Cosmology & Fate of the Universe • Exoplanets (time permitting) Astronomy 1 - Elementary Astronomy LA Mission College Levine F2015 This Class • Review/Debrief Midterm • Exoplanets (time permitting) Astronomy 1 - Elementary Astronomy LA Mission College Levine F2015 About the Final Astronomy 1 — Elementary Astronomy LA Mission College Spring F2015 About the Final • Similar format to Midterms • Similar length • a little longer, -

Stellar and Substellar Companions of Nearby Stars from Gaia DR2 Pierre Kervella, Frédéric Arenou, François Mignard, Frédéric Thévenin
Stellar and substellar companions of nearby stars from Gaia DR2 Pierre Kervella, Frédéric Arenou, François Mignard, Frédéric Thévenin To cite this version: Pierre Kervella, Frédéric Arenou, François Mignard, Frédéric Thévenin. Stellar and substellar com- panions of nearby stars from Gaia DR2. Astronomy and Astrophysics - A&A, EDP Sciences, 2019, 623, pp.A72. 10.1051/0004-6361/201834371. hal-02064555 HAL Id: hal-02064555 https://hal.archives-ouvertes.fr/hal-02064555 Submitted on 12 Mar 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. A&A 623, A72 (2019) Astronomy https://doi.org/10.1051/0004-6361/201834371 & c P. Kervella et al. 2019 Astrophysics Stellar and substellar companions of nearby stars from Gaia DR2 Binarity from proper motion anomaly? Pierre Kervella1, Frédéric Arenou2, François Mignard3, and Frédéric Thévenin3 1 LESIA, Observatoire de Paris, Université PSL, CNRS, Sorbonne Université, Univ. Paris Diderot, Sorbonne Paris Cité, 5 place Jules Janssen, 92195 Meudon, France e-mail: [email protected] 2 GEPI, Observatoire de Paris, Université PSL, CNRS, 5 Place Jules Janssen, 92190 Meudon, France 3 Université Côte d’Azur, Observatoire de la Côte d’Azur, CNRS, Lagrange UMR 7293, CS 34229, 06304 Nice Cedex 4, France Received 3 October 2018 / Accepted 26 January 2019 ABSTRACT Context. -

Dr Jayne Louise Birkby
− DR JAYNE LOUISE BIRKBY − CURRICULUM VITAE Anton Pannekoek Institute for Astronomy, University of Amsterdam Email: [email protected] Science Park 904 Tel: +31 (0)64 139 9595 Amsterdam 1098XH, The Netherlands Web: http://staff.fnwi.uva.nl/j.l.birkby RESEARCH INTERESTS - Characterization of exoplanet atmospheres including composition, structure, and dynamics; - Physical mechanisms responsible for the diversity of planetary systems; - Development of ground-based instrumentation and techniques for detecting and characterizing Earth analogues (biomarkers); - Detection of planetary storms and exomoons via development of high contrast imaging and spectroscopy techniques to monitor exoplanet variability; - Fundamental properties of M-dwarfs and young stars via eclipsing binaries; - Very high-resolution infrared/optical spectroscopy and high contrast imaging, high cadence direct imaging, and sub-millimag precision optical differential photometry; - Diversity, equity and inclusion in academia. EDUCATION University of Cambridge - Ph.D in Astrophysics, May 2012 Institute of Astronomy, Trinity Hall, Supervisor: Dr Simon Hodgkin Thesis: Observational Constraints on Low-Mass Stellar Evolution and Planet Formation Durham University - MSci in Physics and Astronomy, 1st Class Honours, June 2007 Trevelyan College, Supervisor: Dr John Osbourne Masters Project: Energy Dependent γ-ray Morphology in Pulsar Wind Nebulae PROFESSIONAL APPOINTMENTS 2017 - present Assistant Professor, University of Amsterdam, The Netherlands 2014 - 2017 NASA Sagan Fellow, Harvard-Smithsonian