Lecture 1: Differential Forms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

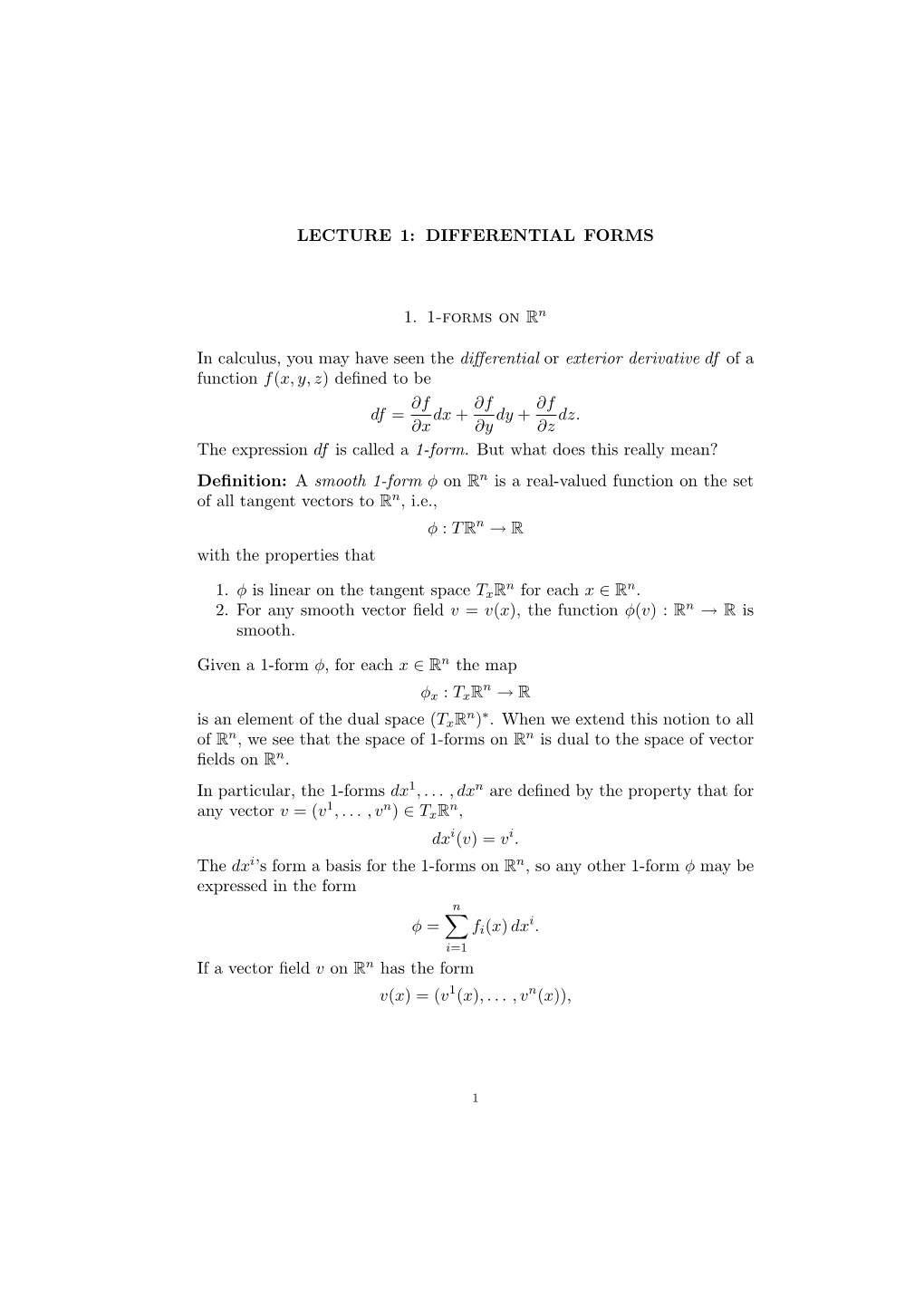
The Directional Derivative the Derivative of a Real Valued Function (Scalar field) with Respect to a Vector
Math 253 The Directional Derivative The derivative of a real valued function (scalar field) with respect to a vector. f(x + h) f(x) What is the vector space analog to the usual derivative in one variable? f 0(x) = lim − ? h 0 h ! x -2 0 2 5 Suppose f is a real valued function (a mapping f : Rn R). ! (e.g. f(x; y) = x2 y2). − 0 Unlike the case with plane figures, functions grow in a variety of z ways at each point on a surface (or n{dimensional structure). We'll be interested in examining the way (f) changes as we move -5 from a point X~ to a nearby point in a particular direction. -2 0 y 2 Figure 1: f(x; y) = x2 y2 − The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . z -5 -2 0 y 2 Figure 2: f(x; y) = x2 y2 − y If we give the direction by using a second vector, say ~u, then for →u X→ + h any real number h, the vector X~ + h~u represents a change in X→ position from X~ along a line through X~ parallel to ~u. →u →u h x Figure 3: Change in position along line parallel to ~u The Directional Derivative x -2 0 2 5 We'll be interested in examining the way (f) changes as we move ~ in a particular direction 0 from a point X to a nearby point . -

The Grassmann Manifold
The Grassmann Manifold 1. For vector spaces V and W denote by L(V; W ) the vector space of linear maps from V to W . Thus L(Rk; Rn) may be identified with the space Rk£n of k £ n matrices. An injective linear map u : Rk ! V is called a k-frame in V . The set k n GFk;n = fu 2 L(R ; R ): rank(u) = kg of k-frames in Rn is called the Stiefel manifold. Note that the special case k = n is the general linear group: k k GLk = fa 2 L(R ; R ) : det(a) 6= 0g: The set of all k-dimensional (vector) subspaces ¸ ½ Rn is called the Grassmann n manifold of k-planes in R and denoted by GRk;n or sometimes GRk;n(R) or n GRk(R ). Let k ¼ : GFk;n ! GRk;n; ¼(u) = u(R ) denote the map which assigns to each k-frame u the subspace u(Rk) it spans. ¡1 For ¸ 2 GRk;n the fiber (preimage) ¼ (¸) consists of those k-frames which form a basis for the subspace ¸, i.e. for any u 2 ¼¡1(¸) we have ¡1 ¼ (¸) = fu ± a : a 2 GLkg: Hence we can (and will) view GRk;n as the orbit space of the group action GFk;n £ GLk ! GFk;n :(u; a) 7! u ± a: The exercises below will prove the following n£k Theorem 2. The Stiefel manifold GFk;n is an open subset of the set R of all n £ k matrices. There is a unique differentiable structure on the Grassmann manifold GRk;n such that the map ¼ is a submersion. -

Topology and Physics 2019 - Lecture 2
Topology and Physics 2019 - lecture 2 Marcel Vonk February 12, 2019 2.1 Maxwell theory in differential form notation Maxwell's theory of electrodynamics is a great example of the usefulness of differential forms. A nice reference on this topic, though somewhat outdated when it comes to notation, is [1]. For notational simplicity, we will work in units where the speed of light, the vacuum permittivity and the vacuum permeability are all equal to 1: c = 0 = µ0 = 1. 2.1.1 The dual field strength In three dimensional space, Maxwell's electrodynamics describes the physics of the electric and magnetic fields E~ and B~ . These are three-dimensional vector fields, but the beauty of the theory becomes much more obvious if we (a) use a four-dimensional relativistic formulation, and (b) write it in terms of differential forms. For example, let us look at Maxwells two source-free, homogeneous equations: r · B = 0;@tB + r × E = 0: (2.1) That these equations have a relativistic flavor becomes clear if we write them out in com- ponents and organize the terms somewhat suggestively: x y z 0 + @xB + @yB + @zB = 0 x z y −@tB + 0 − @yE + @zE = 0 (2.2) y z x −@tB + @xE + 0 − @zE = 0 z y x −@tB − @xE + @yE + 0 = 0 Note that we also multiplied the last three equations by −1 to clarify the structure. All in all, we see that we have four equations (one for each space-time coordinate) which each contain terms in which the four coordinate derivatives act. Therefore, we may be tempted to write our set of equations in more \relativistic" notation as ^µν @µF = 0 (2.3) 1 with F^µν the coordinates of an antisymmetric two-tensor (i. -

LP THEORY of DIFFERENTIAL FORMS on MANIFOLDS This
TRANSACTIONSOF THE AMERICAN MATHEMATICALSOCIETY Volume 347, Number 6, June 1995 LP THEORY OF DIFFERENTIAL FORMS ON MANIFOLDS CHAD SCOTT Abstract. In this paper, we establish a Hodge-type decomposition for the LP space of differential forms on closed (i.e., compact, oriented, smooth) Rieman- nian manifolds. Critical to the proof of this result is establishing an LP es- timate which contains, as a special case, the L2 result referred to by Morrey as Gaffney's inequality. This inequality helps us show the equivalence of the usual definition of Sobolev space with a more geometric formulation which we provide in the case of differential forms on manifolds. We also prove the LP boundedness of Green's operator which we use in developing the LP theory of the Hodge decomposition. For the calculus of variations, we rigorously verify that the spaces of exact and coexact forms are closed in the LP norm. For nonlinear analysis, we demonstrate the existence and uniqueness of a solution to the /1-harmonic equation. 1. Introduction This paper contributes primarily to the development of the LP theory of dif- ferential forms on manifolds. The reader should be aware that for the duration of this paper, manifold will refer only to those which are Riemannian, compact, oriented, C°° smooth and without boundary. For p = 2, the LP theory is well understood and the L2-Hodge decomposition can be found in [M]. However, in the case p ^ 2, the LP theory has yet to be fully developed. Recent appli- cations of the LP theory of differential forms on W to both quasiconformal mappings and nonlinear elasticity continue to motivate interest in this subject. -

Laplacians in Geometric Analysis
LAPLACIANS IN GEOMETRIC ANALYSIS Syafiq Johar syafi[email protected] Contents 1 Trace Laplacian 1 1.1 Connections on Vector Bundles . .1 1.2 Local and Explicit Expressions . .2 1.3 Second Covariant Derivative . .3 1.4 Curvatures on Vector Bundles . .4 1.5 Trace Laplacian . .5 2 Harmonic Functions 6 2.1 Gradient and Divergence Operators . .7 2.2 Laplace-Beltrami Operator . .7 2.3 Harmonic Functions . .8 2.4 Harmonic Maps . .8 3 Hodge Laplacian 9 3.1 Exterior Derivatives . .9 3.2 Hodge Duals . 10 3.3 Hodge Laplacian . 12 4 Hodge Decomposition 13 4.1 De Rham Cohomology . 13 4.2 Hodge Decomposition Theorem . 14 5 Weitzenb¨ock and B¨ochner Formulas 15 5.1 Weitzenb¨ock Formula . 15 5.1.1 0-forms . 15 5.1.2 k-forms . 15 5.2 B¨ochner Formula . 17 1 Trace Laplacian In this section, we are going to present a notion of Laplacian that is regularly used in differential geometry, namely the trace Laplacian (also called the rough Laplacian or connection Laplacian). We recall the definition of connection on vector bundles which allows us to take the directional derivative of vector bundles. 1.1 Connections on Vector Bundles Definition 1.1 (Connection). Let M be a differentiable manifold and E a vector bundle over M. A connection or covariant derivative at a point p 2 M is a map D : Γ(E) ! Γ(T ∗M ⊗ E) 1 with the properties for any V; W 2 TpM; σ; τ 2 Γ(E) and f 2 C (M), we have that DV σ 2 Ep with the following properties: 1. -

NOTES on DIFFERENTIAL FORMS. PART 3: TENSORS 1. What Is A
NOTES ON DIFFERENTIAL FORMS. PART 3: TENSORS 1. What is a tensor? 1 n Let V be a finite-dimensional vector space. It could be R , it could be the tangent space to a manifold at a point, or it could just be an abstract vector space. A k-tensor is a map T : V × · · · × V ! R 2 (where there are k factors of V ) that is linear in each factor. That is, for fixed ~v2; : : : ;~vk, T (~v1;~v2; : : : ;~vk−1;~vk) is a linear function of ~v1, and for fixed ~v1;~v3; : : : ;~vk, T (~v1; : : : ;~vk) is a k ∗ linear function of ~v2, and so on. The space of k-tensors on V is denoted T (V ). Examples: n • If V = R , then the inner product P (~v; ~w) = ~v · ~w is a 2-tensor. For fixed ~v it's linear in ~w, and for fixed ~w it's linear in ~v. n • If V = R , D(~v1; : : : ;~vn) = det ~v1 ··· ~vn is an n-tensor. n • If V = R , T hree(~v) = \the 3rd entry of ~v" is a 1-tensor. • A 0-tensor is just a number. It requires no inputs at all to generate an output. Note that the definition of tensor says nothing about how things behave when you rotate vectors or permute their order. The inner product P stays the same when you swap the two vectors, but the determinant D changes sign when you swap two vectors. Both are tensors. For a 1-tensor like T hree, permuting the order of entries doesn't even make sense! ~ ~ Let fb1;:::; bng be a basis for V . -

1 Curl and Divergence
Sections 15.5-15.8: Divergence, Curl, Surface Integrals, Stokes' and Divergence Theorems Reeve Garrett 1 Curl and Divergence Definition 1.1 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the divergence of F on D is @ @ @ div F := r · F = ; ; · hf; g; hi = f + g + h ; @x @y @z x y z @ @ @ where r = h @x ; @y ; @z i is the del operator. If div F = 0, we say that F is source free. Note that these definitions (divergence and source free) completely agrees with their 2D analogues in 15.4. Theorem 1.2 Suppose that F is a radial vector field, i.e. if r = hx; y; zi, then for some real number p, r hx;y;zi 3−p F = jrjp = (x2+y2+z2)p=2 , then div F = jrjp . Theorem 1.3 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the curl of F on D is curl F := r × F = hhy − gz; fz − hx; gx − fyi: If curl F = 0, then we say F is irrotational. Note that gx − fy is the 2D curl as defined in section 15.4. Therefore, if we fix a point (a; b; c), [gx − fy](a; b; c), measures the rotation of F at the point (a; b; c) in the plane z = c. Similarly, [hy − gz](a; b; c) measures the rotation of F in the plane x = a at (a; b; c), and [fz − hx](a; b; c) measures the rotation of F in the plane y = b at the point (a; b; c). -

1.2 Topological Tensor Calculus
PH211 Physical Mathematics Fall 2019 1.2 Topological tensor calculus 1.2.1 Tensor fields Finite displacements in Euclidean space can be represented by arrows and have a natural vector space structure, but finite displacements in more general curved spaces, such as on the surface of a sphere, do not. However, an infinitesimal neighborhood of a point in a smooth curved space1 looks like an infinitesimal neighborhood of Euclidean space, and infinitesimal displacements dx~ retain the vector space structure of displacements in Euclidean space. An infinitesimal neighborhood of a point can be infinitely rescaled to generate a finite vector space, called the tangent space, at the point. A vector lives in the tangent space of a point. Note that vectors do not stretch from one point to vector tangent space at p p space Figure 1.2.1: A vector in the tangent space of a point. another, and vectors at different points live in different tangent spaces and so cannot be added. For example, rescaling the infinitesimal displacement dx~ by dividing it by the in- finitesimal scalar dt gives the velocity dx~ ~v = (1.2.1) dt which is a vector. Similarly, we can picture the covector rφ as the infinitesimal contours of φ in a neighborhood of a point, infinitely rescaled to generate a finite covector in the point's cotangent space. More generally, infinitely rescaling the neighborhood of a point generates the tensor space and its algebra at the point. The tensor space contains the tangent and cotangent spaces as a vector subspaces. A tensor field is something that takes tensor values at every point in a space. -

On Manifolds of Tensors of Fixed Tt-Rank
ON MANIFOLDS OF TENSORS OF FIXED TT-RANK SEBASTIAN HOLTZ, THORSTEN ROHWEDDER, AND REINHOLD SCHNEIDER Abstract. Recently, the format of TT tensors [19, 38, 34, 39] has turned out to be a promising new format for the approximation of solutions of high dimensional problems. In this paper, we prove some new results for the TT representation of a tensor U ∈ Rn1×...×nd and for the manifold of tensors of TT-rank r. As a first result, we prove that the TT (or compression) ranks ri of a tensor U are unique and equal to the respective seperation ranks of U if the components of the TT decomposition are required to fulfil a certain maximal rank condition. We then show that d the set T of TT tensors of fixed rank r forms an embedded manifold in Rn , therefore preserving the essential theoretical properties of the Tucker format, but often showing an improved scaling behaviour. Extending a similar approach for matrices [7], we introduce certain gauge conditions to obtain a unique representation of the tangent space TU T of T and deduce a local parametrization of the TT manifold. The parametrisation of TU T is often crucial for an algorithmic treatment of high-dimensional time-dependent PDEs and minimisation problems [33]. We conclude with remarks on those applications and present some numerical examples. 1. Introduction The treatment of high-dimensional problems, typically of problems involving quantities from Rd for larger dimensions d, is still a challenging task for numerical approxima- tion. This is owed to the principal problem that classical approaches for their treatment normally scale exponentially in the dimension d in both needed storage and computa- tional time and thus quickly become computationally infeasable for sensible discretiza- tions of problems of interest. -

A Brief Tour of Vector Calculus
A BRIEF TOUR OF VECTOR CALCULUS A. HAVENS Contents 0 Prelude ii 1 Directional Derivatives, the Gradient and the Del Operator 1 1.1 Conceptual Review: Directional Derivatives and the Gradient........... 1 1.2 The Gradient as a Vector Field............................ 5 1.3 The Gradient Flow and Critical Points ....................... 10 1.4 The Del Operator and the Gradient in Other Coordinates*............ 17 1.5 Problems........................................ 21 2 Vector Fields in Low Dimensions 26 2 3 2.1 General Vector Fields in Domains of R and R . 26 2.2 Flows and Integral Curves .............................. 31 2.3 Conservative Vector Fields and Potentials...................... 32 2.4 Vector Fields from Frames*.............................. 37 2.5 Divergence, Curl, Jacobians, and the Laplacian................... 41 2.6 Parametrized Surfaces and Coordinate Vector Fields*............... 48 2.7 Tangent Vectors, Normal Vectors, and Orientations*................ 52 2.8 Problems........................................ 58 3 Line Integrals 66 3.1 Defining Scalar Line Integrals............................. 66 3.2 Line Integrals in Vector Fields ............................ 75 3.3 Work in a Force Field................................. 78 3.4 The Fundamental Theorem of Line Integrals .................... 79 3.5 Motion in Conservative Force Fields Conserves Energy .............. 81 3.6 Path Independence and Corollaries of the Fundamental Theorem......... 82 3.7 Green's Theorem.................................... 84 3.8 Problems........................................ 89 4 Surface Integrals, Flux, and Fundamental Theorems 93 4.1 Surface Integrals of Scalar Fields........................... 93 4.2 Flux........................................... 96 4.3 The Gradient, Divergence, and Curl Operators Via Limits* . 103 4.4 The Stokes-Kelvin Theorem..............................108 4.5 The Divergence Theorem ...............................112 4.6 Problems........................................114 List of Figures 117 i 11/14/19 Multivariate Calculus: Vector Calculus Havens 0. -

Notes for Math 136: Review of Calculus
Notes for Math 136: Review of Calculus Gyu Eun Lee These notes were written for my personal use for teaching purposes for the course Math 136 running in the Spring of 2016 at UCLA. They are also intended for use as a general calculus reference for this course. In these notes we will briefly review the results of the calculus of several variables most frequently used in partial differential equations. The selection of topics is inspired by the list of topics given by Strauss at the end of section 1.1, but we will not cover everything. Certain topics are covered in the Appendix to the textbook, and we will not deal with them here. The results of single-variable calculus are assumed to be familiar. Practicality, not rigor, is the aim. This document will be updated throughout the quarter as we encounter material involving additional topics. We will focus on functions of two real variables, u = u(x;t). Most definitions and results listed will have generalizations to higher numbers of variables, and we hope the generalizations will be reasonably straightforward to the reader if they become necessary. Occasionally (notably for the chain rule in its many forms) it will be convenient to work with functions of an arbitrary number of variables. We will be rather loose about the issues of differentiability and integrability: unless otherwise stated, we will assume all derivatives and integrals exist, and if we require it we will assume derivatives are continuous up to the required order. (This is also generally the assumption in Strauss.) 1 Differential calculus of several variables 1.1 Partial derivatives Given a scalar function u = u(x;t) of two variables, we may hold one of the variables constant and regard it as a function of one variable only: vx(t) = u(x;t) = wt(x): Then the partial derivatives of u with respect of x and with respect to t are defined as the familiar derivatives from single variable calculus: ¶u dv ¶u dw = x ; = t : ¶t dt ¶x dx c 2016, Gyu Eun Lee. -

Curl, Divergence and Laplacian
Curl, Divergence and Laplacian What to know: 1. The definition of curl and it two properties, that is, theorem 1, and be able to predict qualitatively how the curl of a vector field behaves from a picture. 2. The definition of divergence and it two properties, that is, if div F~ 6= 0 then F~ can't be written as the curl of another field, and be able to tell a vector field of clearly nonzero,positive or negative divergence from the picture. 3. Know the definition of the Laplace operator 4. Know what kind of objects those operator take as input and what they give as output. The curl operator Let's look at two plots of vector fields: Figure 1: The vector field Figure 2: The vector field h−y; x; 0i: h1; 1; 0i We can observe that the second one looks like it is rotating around the z axis. We'd like to be able to predict this kind of behavior without having to look at a picture. We also promised to find a criterion that checks whether a vector field is conservative in R3. Both of those goals are accomplished using a tool called the curl operator, even though neither of those two properties is exactly obvious from the definition we'll give. Definition 1. Let F~ = hP; Q; Ri be a vector field in R3, where P , Q and R are continuously differentiable. We define the curl operator: @R @Q @P @R @Q @P curl F~ = − ~i + − ~j + − ~k: (1) @y @z @z @x @x @y Remarks: 1.