Conservation of the Linear Momentum
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -
Non-Local Momentum Transport Parameterizations
Non-local Momentum Transport Parameterizations Joe Tribbia NCAR.ESSL.CGD.AMP Outline • Historical view: gravity wave drag (GWD) and convective momentum transport (CMT) • GWD development -semi-linear theory -impact • CMT development -theory -impact Both parameterizations of recent vintage compared to radiation or PBL GWD CMT • 1960’s discussion by Philips, • 1972 cumulus vorticity Blumen and Bretherton damping ‘observed’ Holton • 1970’s quantification Lilly • 1976 Schneider and and momentum budget by Lindzen -Cumulus Friction Swinbank • 1980’s NASA GLAS model- • 1980’s incorporation into Helfand NWP and climate models- • 1990’s pressure term- Miller and Palmer and Gregory McFarlane Atmospheric Gravity Waves Simple gravity wave model Topographic Gravity Waves and Drag • Flow over topography generates gravity (i.e. buoyancy) waves • <u’w’> is positive in example • Power spectrum of Earth’s topography α k-2 so there is a lot of subgrid orography • Subgrid orography generating unresolved gravity waves can transport momentum vertically • Let’s parameterize this mechanism! Begin with linear wave theory Simplest model for gravity waves: with Assume w’ α ei(kx+mz-σt) gives the dispersion relation or Linear theory (cont.) Sinusoidal topography ; set σ=0. Gives linear lower BC Small scale waves k>N/U0 decay Larger scale waves k<N/U0 propagate Semi-linear Parameterization Propagating solution with upward group velocity In the hydrostatic limit The surface drag can be related to the momentum transport δh=isentropic Momentum transport invariant by displacement Eliassen-Palm. Deposited when η=U linear theory is invalid (CL, breaking) z φ=phase Gravity Wave Drag Parameterization Convective or shear instabilty begins to dissipate wave- momentum flux no longer constant Waves propagate vertically, amplitude grows as r-1/2 (energy force cons.). -

10. Collisions • Use Conservation of Momentum and Energy and The
10. Collisions • Use conservation of momentum and energy and the center of mass to understand collisions between two objects. • During a collision, two or more objects exert a force on one another for a short time: -F(t) F(t) Before During After • It is not necessary for the objects to touch during a collision, e.g. an asteroid flied by the earth is considered a collision because its path is changed due to the gravitational attraction of the earth. One can still use conservation of momentum and energy to analyze the collision. Impulse: During a collision, the objects exert a force on one another. This force may be complicated and change with time. However, from Newton's 3rd Law, the two objects must exert an equal and opposite force on one another. F(t) t ti tf Dt From Newton'sr 2nd Law: dp r = F (t) dt r r dp = F (t)dt r r r r tf p f - pi = Dp = ò F (t)dt ti The change in the momentum is defined as the impulse of the collision. • Impulse is a vector quantity. Impulse-Linear Momentum Theorem: In a collision, the impulse on an object is equal to the change in momentum: r r J = Dp Conservation of Linear Momentum: In a system of two or more particles that are colliding, the forces that these objects exert on one another are internal forces. These internal forces cannot change the momentum of the system. Only an external force can change the momentum. The linear momentum of a closed isolated system is conserved during a collision of objects within the system. -
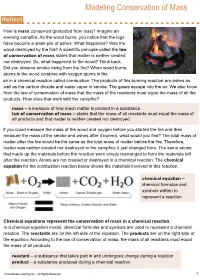
Modeling Conservation of Mass
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

Derivation of Fluid Flow Equations
TPG4150 Reservoir Recovery Techniques 2017 1 Fluid Flow Equations DERIVATION OF FLUID FLOW EQUATIONS Review of basic steps Generally speaking, flow equations for flow in porous materials are based on a set of mass, momentum and energy conservation equations, and constitutive equations for the fluids and the porous material involved. For simplicity, we will in the following assume isothermal conditions, so that we not have to involve an energy conservation equation. However, in cases of changing reservoir temperature, such as in the case of cold water injection into a warmer reservoir, this may be of importance. Below, equations are initially described for single phase flow in linear, one- dimensional, horizontal systems, but are later on extended to multi-phase flow in two and three dimensions, and to other coordinate systems. Conservation of mass Consider the following one dimensional rod of porous material: Mass conservation may be formulated across a control element of the slab, with one fluid of density ρ is flowing through it at a velocity u: u ρ Δx The mass balance for the control element is then written as: ⎧Mass into the⎫ ⎧Mass out of the ⎫ ⎧ Rate of change of mass⎫ ⎨ ⎬ − ⎨ ⎬ = ⎨ ⎬ , ⎩element at x ⎭ ⎩element at x + Δx⎭ ⎩ inside the element ⎭ or ∂ {uρA} − {uρA} = {φAΔxρ}. x x+ Δx ∂t Dividing by Δx, and taking the limit as Δx approaches zero, we get the conservation of mass, or continuity equation: ∂ ∂ − (Aρu) = (Aφρ). ∂x ∂t For constant cross sectional area, the continuity equation simplifies to: ∂ ∂ − (ρu) = (φρ) . ∂x ∂t Next, we need to replace the velocity term by an equation relating it to pressure gradient and fluid and rock properties, and the density and porosity terms by appropriate pressure dependent functions. -

Fluids – Lecture 7 Notes 1
Fluids – Lecture 7 Notes 1. Momentum Flow 2. Momentum Conservation Reading: Anderson 2.5 Momentum Flow Before we can apply the principle of momentum conservation to a fixed permeable control volume, we must first examine the effect of flow through its surface. When material flows through the surface, it carries not only mass, but momentum as well. The momentum flow can be described as −→ −→ momentum flow = (mass flow) × (momentum /mass) where the mass flow was defined earlier, and the momentum/mass is simply the velocity vector V~ . Therefore −→ momentum flow =m ˙ V~ = ρ V~ ·nˆ A V~ = ρVnA V~ where Vn = V~ ·nˆ as before. Note that while mass flow is a scalar, the momentum flow is a vector, and points in the same direction as V~ . The momentum flux vector is defined simply as the momentum flow per area. −→ momentum flux = ρVn V~ V n^ . mV . A m ρ Momentum Conservation Newton’s second law states that during a short time interval dt, the impulse of a force F~ applied to some affected mass, will produce a momentum change dP~a in that affected mass. When applied to a fixed control volume, this principle becomes F dP~ a = F~ (1) dt V . dP~ ˙ ˙ P(t) P + P~ − P~ = F~ (2) . out dt out in Pin 1 In the second equation (2), P~ is defined as the instantaneous momentum inside the control volume. P~ (t) ≡ ρ V~ dV ZZZ ˙ The P~ out is added because mass leaving the control volume carries away momentum provided ˙ by F~ , which P~ alone doesn’t account for. -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Key Concepts: Conservation of Mass, Momentum, Energy Fluid: a Material
Key concepts: Conservation of mass, momentum, energy Fluid: a material that deforms continuously and permanently under the application of a shearing stress, no matter how small. Fluids are either gases or liquids. (Under very specialized conditions, a phase of intermediate properties can be stable, but we won’t consider that possibility.) In liquids, the molecules are relatively closely spaced, allowing the magnitude of their (attractive, electrically-based) interaction energy to be of the same magnitude as their kinetic energy. As a result, they exist as a loose collection of clusters. In gases, the molecules are much more widely separated, so the kinetic energy (at a given temperature, identical to that in the liquid) is far greater than the interaction energy (much less than in the liquid), and molecule do not form clusters. In a liquid, the molecules themselves typically occupy a few percent of the total space available; in a gas, they occupy a few thousandths of a percent. Nevertheless, for our purposes, all fluids are considered to be continua (no voids or holes).The absence of significant intermolecular attraction allows gases to fill whatever volume is available to them, whereas the presence of such attraction in liquids prevents them from doing so. The attractive forces in liquid water are unusually strong, compared to other liquids. Properties of Fluids: m Density is mass/volume: ρ = . The density of liquid water is V 3 o −3 3 ~1.0 kg/m ; that of air at 20 C is ~1.2x10 kg/m . mg W Specific weight is weight/volume: γ = = = ρg V V C:\Adata\CLASNOTE\342\Class Notes\Key concepts_Topic 1.doc 1 γ Specific gravity is density normalized to the density of water: sg..= i γ w V 1 Specific volume is volume/mass: V = = m ρ Bulk modulus or modulus of elasticity is the pressure change per dp dp fractional change in volume or density: E =− = . -

Continuity Equation in Pressure Coordinates
Continuity Equation in Pressure Coordinates Here we will derive the continuity equation from the principle that mass is conserved for a parcel following the fluid motion (i.e., there is no flow across the boundaries of the parcel). This implies that δxδyδp δM = ρ δV = ρ δxδyδz = − g is conserved following the fluid motion: 1 d(δM ) = 0 δM dt 1 d()δM = 0 δM dt g d ⎛ δxδyδp ⎞ ⎜ ⎟ = 0 δxδyδp dt ⎝ g ⎠ 1 ⎛ d(δp) d(δy) d(δx)⎞ ⎜δxδy +δxδp +δyδp ⎟ = 0 δxδyδp ⎝ dt dt dt ⎠ 1 ⎛ dp ⎞ 1 ⎛ dy ⎞ 1 ⎛ dx ⎞ δ ⎜ ⎟ + δ ⎜ ⎟ + δ ⎜ ⎟ = 0 δp ⎝ dt ⎠ δy ⎝ dt ⎠ δx ⎝ dt ⎠ Taking the limit as δx, δy, δp → 0, ∂u ∂v ∂ω Continuity equation + + = 0 in pressure ∂x ∂y ∂p coordinates 1 Determining Vertical Velocities • Typical large-scale vertical motions in the atmosphere are of the order of 0. 01-01m/s0.1 m/s. • Such motions are very difficult, if not impossible, to measure directly. Typical observational errors for wind measurements are ~1 m/s. • Quantitative estimates of vertical velocity must be inferred from quantities that can be directly measured with sufficient accuracy. Vertical Velocity in P-Coordinates The equivalent of the vertical velocity in p-coordinates is: dp ∂p r ∂p ω = = +V ⋅∇p + w dt ∂t ∂z Based on a scaling of the three terms on the r.h.s., the last term is at least an order of magnitude larger than the other two. Making the hydrostatic approximation yields ∂p ω ≈ w = −ρgw ∂z Typical large-scale values: for w, 0.01 m/s = 1 cm/s for ω, 0.1 Pa/s = 1 μbar/s 2 The Kinematic Method By integrating the continuity equation in (x,y,p) coordinates, ω can be obtained from the mean divergence in a layer: ⎛ ∂u ∂v ⎞ ∂ω ⎜ + ⎟ + = 0 continuity equation in (x,y,p) coordinates ⎝ ∂x ∂y ⎠ p ∂p p2 p2 ⎛ ∂u ∂v ⎞ ∂ω = − ⎜ + ⎟ ∂p rearrange and integrate over the layer ∫p ∫ ⎜ ⎟ 1 ∂x ∂y p1⎝ ⎠ p ⎛ ∂u ∂v ⎞ ω(p )−ω(p ) = (p − p )⎜ + ⎟ overbar denotes pressure- 2 1 1 2 ⎜ ⎟ weighted vertical average ⎝ ∂x ∂y ⎠ p To determine vertical motion at a pressure level p2, assume that p1 = surface pressure and there is no vertical motion at the surface. -

On the Geometric Character of Stress in Continuum Mechanics
Z. angew. Math. Phys. 58 (2007) 1–14 0044-2275/07/050001-14 DOI 10.1007/s00033-007-6141-8 Zeitschrift f¨ur angewandte c 2007 Birkh¨auser Verlag, Basel Mathematik und Physik ZAMP On the geometric character of stress in continuum mechanics Eva Kanso, Marino Arroyo, Yiying Tong, Arash Yavari, Jerrold E. Marsden1 and Mathieu Desbrun Abstract. This paper shows that the stress field in the classical theory of continuum mechanics may be taken to be a covector-valued differential two-form. The balance laws and other funda- mental laws of continuum mechanics may be neatly rewritten in terms of this geometric stress. A geometrically attractive and covariant derivation of the balance laws from the principle of energy balance in terms of this stress is presented. Mathematics Subject Classification (2000). Keywords. Continuum mechanics, elasticity, stress tensor, differential forms. 1. Motivation This paper proposes a reformulation of classical continuum mechanics in terms of bundle-valued exterior forms. Our motivation is to provide a geometric description of force in continuum mechanics, which leads to an elegant geometric theory and, at the same time, may enable the development of space-time integration algorithms that respect the underlying geometric structure at the discrete level. In classical mechanics the traditional approach is to define all the kinematic and kinetic quantities using vector and tensor fields. For example, velocity and traction are both viewed as vector fields and power is defined as their inner product, which is induced from an appropriately defined Riemannian metric. On the other hand, it has long been appreciated in geometric mechanics that force should not be viewed as a vector, but rather a one-form. -

Chapter 3 Newtonian Fluids
CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Chapter 3: Newtonian Fluids CM4650 Polymer Rheology Michigan Tech Navier-Stokes Equation v vv p 2 v g t 1 © Faith A. Morrison, Michigan Tech U. Chapter 3: Newtonian Fluid Mechanics TWO GOALS •Derive governing equations (mass and momentum balances •Solve governing equations for velocity and stress fields QUICK START V W x First, before we get deep into 2 v (x ) H derivation, let’s do a Navier-Stokes 1 2 x1 problem to get you started in the x3 mechanics of this type of problem solving. 2 © Faith A. Morrison, Michigan Tech U. 1 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics EXAMPLE: Drag flow between infinite parallel plates •Newtonian •steady state •incompressible fluid •very wide, long V •uniform pressure W x2 v1(x2) H x1 x3 3 EXAMPLE: Poiseuille flow between infinite parallel plates •Newtonian •steady state •Incompressible fluid •infinitely wide, long W x2 2H x1 x3 v (x ) x1=0 1 2 x1=L p=Po p=PL 4 2 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Engineering Quantities of In more complex flows, we can use Interest general expressions that work in all cases. (any flow) volumetric ⋅ flow rate ∬ ⋅ | average 〈 〉 velocity ∬ Using the general formulas will Here, is the outwardly pointing unit normal help prevent errors. of ; it points in the direction “through” 5 © Faith A. Morrison, Michigan Tech U. The stress tensor was Total stress tensor, Π: invented to make the calculation of fluid stress easier. Π ≡ b (any flow, small surface) dS nˆ Force on the S ⋅ Π surface V (using the stress convention of Understanding Rheology) Here, is the outwardly pointing unit normal of ; it points in the direction “through” 6 © Faith A.