Moment of Inertia and Properties of Plane Areas Example Radius Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Experimental Determination of the Moment of Inertia of a Model Airplane Michael Koken [email protected]
The University of Akron IdeaExchange@UAkron The Dr. Gary B. and Pamela S. Williams Honors Honors Research Projects College Fall 2017 The Experimental Determination of the Moment of Inertia of a Model Airplane Michael Koken [email protected] Please take a moment to share how this work helps you through this survey. Your feedback will be important as we plan further development of our repository. Follow this and additional works at: http://ideaexchange.uakron.edu/honors_research_projects Part of the Aerospace Engineering Commons, Aviation Commons, Civil and Environmental Engineering Commons, Mechanical Engineering Commons, and the Physics Commons Recommended Citation Koken, Michael, "The Experimental Determination of the Moment of Inertia of a Model Airplane" (2017). Honors Research Projects. 585. http://ideaexchange.uakron.edu/honors_research_projects/585 This Honors Research Project is brought to you for free and open access by The Dr. Gary B. and Pamela S. Williams Honors College at IdeaExchange@UAkron, the institutional repository of The nivU ersity of Akron in Akron, Ohio, USA. It has been accepted for inclusion in Honors Research Projects by an authorized administrator of IdeaExchange@UAkron. For more information, please contact [email protected], [email protected]. 2017 THE EXPERIMENTAL DETERMINATION OF A MODEL AIRPLANE KOKEN, MICHAEL THE UNIVERSITY OF AKRON Honors Project TABLE OF CONTENTS List of Tables ................................................................................................................................................ -

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -

The Stress Tensor
An Internet Book on Fluid Dynamics The Stress Tensor The general state of stress in any homogeneous continuum, whether fluid or solid, consists of a stress acting perpendicular to any plane and two orthogonal shear stresses acting tangential to that plane. Thus, Figure 1: Differential element indicating the nine stresses. as depicted in Figure 1, there will be a similar set of three stresses acting on each of the three perpendicular planes in a three-dimensional continuum for a total of nine stresses which are most conveniently denoted by the stress tensor, σij, defined as the stress in the j direction acting on a plane normal to the i direction. Equivalently we can think of σij as the 3 × 3 matrix ⎡ ⎤ σxx σxy σxz ⎣ ⎦ σyx σyy σyz (Bha1) σzx σzy σzz in which the diagonal terms, σxx, σyy and σzz, are the normal stresses which would be equal to −p in any fluid at rest (note the change in the sign convention in which tensile normal stresses are positive whereas a positive pressure is compressive). The off-digonal terms, σij with i = j, are all shear stresses which would, of course, be zero in a fluid at rest and are proportional to the viscosity in a fluid in motion. In fact, instead of nine independent stresses there are only six because, as we shall see, the stress tensor is symmetric, specifically σij = σji. In other words the shear stress acting in the i direction on a face perpendicular to the j direction is equal to the shear stress acting in the j direction on a face perpendicular to the i direction. -

Pierre Simon Laplace - Biography Paper
Pierre Simon Laplace - Biography Paper MATH 4010 Melissa R. Moore University of Colorado- Denver April 1, 2008 2 Many people contributed to the scientific fields of mathematics, physics, chemistry and astronomy. According to Gillispie (1997), Pierre Simon Laplace was the most influential scientist in all history, (p.vii). Laplace helped form the modern scientific disciplines. His techniques are used diligently by engineers, mathematicians and physicists. His diverse collection of work ranged in all fields but began in mathematics. Laplace was born in Normandy in 1749. His father, Pierre, was a syndic of a parish and his mother, Marie-Anne, was from a family of farmers. Many accounts refer to Laplace as a peasant. While it was not exactly known the profession of his Uncle Louis, priest, mathematician or teacher, speculations implied he was an educated man. In 1756, Laplace enrolled at the Beaumont-en-Auge, a secondary school run the Benedictine order. He studied there until the age of sixteen. The nest step of education led to either the army or the church. His father intended him for ecclesiastical vocation, according to Gillispie (1997 p.3). In 1766, Laplace went to the University of Caen to begin preparation for a career in the church, according to Katz (1998 p.609). Cristophe Gadbled and Pierre Le Canu taught Laplace mathematics, which in turn showed him his talents. In 1768, Laplace left for Paris to pursue mathematics further. Le Canu gave Laplace a letter of recommendation to d’Alembert, according to Gillispie (1997 p.3). Allegedly d’Alembert gave Laplace a problem which he solved immediately. -

Magnetism, Angular Momentum, and Spin
Chapter 19 Magnetism, Angular Momentum, and Spin P. J. Grandinetti Chem. 4300 P. J. Grandinetti Chapter 19: Magnetism, Angular Momentum, and Spin In 1820 Hans Christian Ørsted discovered that electric current produces a magnetic field that deflects compass needle from magnetic north, establishing first direct connection between fields of electricity and magnetism. P. J. Grandinetti Chapter 19: Magnetism, Angular Momentum, and Spin Biot-Savart Law Jean-Baptiste Biot and Félix Savart worked out that magnetic field, B⃗, produced at distance r away from section of wire of length dl carrying steady current I is 휇 I d⃗l × ⃗r dB⃗ = 0 Biot-Savart law 4휋 r3 Direction of magnetic field vector is given by “right-hand” rule: if you point thumb of your right hand along direction of current then your fingers will curl in direction of magnetic field. current P. J. Grandinetti Chapter 19: Magnetism, Angular Momentum, and Spin Microscopic Origins of Magnetism Shortly after Biot and Savart, Ampére suggested that magnetism in matter arises from a multitude of ring currents circulating at atomic and molecular scale. André-Marie Ampére 1775 - 1836 P. J. Grandinetti Chapter 19: Magnetism, Angular Momentum, and Spin Magnetic dipole moment from current loop Current flowing in flat loop of wire with area A will generate magnetic field magnetic which, at distance much larger than radius, r, appears identical to field dipole produced by point magnetic dipole with strength of radius 휇 = | ⃗휇| = I ⋅ A current Example What is magnetic dipole moment induced by e* in circular orbit of radius r with linear velocity v? * 휋 Solution: For e with linear velocity of v the time for one orbit is torbit = 2 r_v. -

Thermodynamics of Spacetime: the Einstein Equation of State
gr-qc/9504004 UMDGR-95-114 Thermodynamics of Spacetime: The Einstein Equation of State Ted Jacobson Department of Physics, University of Maryland College Park, MD 20742-4111, USA [email protected] Abstract The Einstein equation is derived from the proportionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat, entropy, and temperature. The key idea is to demand that this relation hold for all the local Rindler causal horizons through each spacetime point, with δQ and T interpreted as the energy flux and Unruh temperature seen by an accelerated observer just inside the horizon. This requires that gravitational lensing by matter energy distorts the causal structure of spacetime in just such a way that the Einstein equation holds. Viewed in this way, the Einstein equation is an equation of state. This perspective suggests that it may be no more appropriate to canonically quantize the Einstein equation than it would be to quantize the wave equation for sound in air. arXiv:gr-qc/9504004v2 6 Jun 1995 The four laws of black hole mechanics, which are analogous to those of thermodynamics, were originally derived from the classical Einstein equation[1]. With the discovery of the quantum Hawking radiation[2], it became clear that the analogy is in fact an identity. How did classical General Relativity know that horizon area would turn out to be a form of entropy, and that surface gravity is a temperature? In this letter I will answer that question by turning the logic around and deriving the Einstein equation from the propor- tionality of entropy and horizon area together with the fundamental relation δQ = T dS connecting heat Q, entropy S, and temperature T . -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Finite Element Model Calibration of an Instrumented Thirteen-Story Steel Moment Frame Building in South San Fernando Valley, California
Finite Element Model Calibration of An Instrumented Thirteen-story Steel Moment Frame Building in South San Fernando Valley, California By Erol Kalkan Disclamer The finite element model incuding its executable file are provided by the copyright holder "as is" and any express or implied warranties, including, but not limited to, the implied warranties of merchantability and fitness for a particular purpose are disclaimed. In no event shall the copyright owner be liable for any direct, indirect, incidental, special, exemplary, or consequential damages (including, but not limited to, procurement of substitute goods or services; loss of use, data, or profits; or business interruption) however caused and on any theory of liability, whether in contract, strict liability, or tort (including negligence or otherwise) arising in any way out of the use of this software, even if advised of the possibility of such damage. Acknowledgments Ground motions were recorded at a station owned and maintained by the California Geological Survey (CGS). Data can be downloaded from CESMD Virtual Data Center at: http://www.strongmotioncenter.org/cgi-bin/CESMD/StaEvent.pl?stacode=CE24567. Contents Introduction ..................................................................................................................................................... 1 OpenSEES Model ........................................................................................................................................... 3 Calibration of OpenSEES Model to Observed Response -
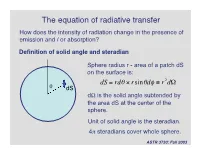
The Equation of Radiative Transfer How Does the Intensity of Radiation Change in the Presence of Emission and / Or Absorption?
The equation of radiative transfer How does the intensity of radiation change in the presence of emission and / or absorption? Definition of solid angle and steradian Sphere radius r - area of a patch dS on the surface is: dS = rdq ¥ rsinqdf ≡ r2dW q dS dW is the solid angle subtended by the area dS at the center of the † sphere. Unit of solid angle is the steradian. 4p steradians cover whole sphere. ASTR 3730: Fall 2003 Definition of the specific intensity Construct an area dA normal to a light ray, and consider all the rays that pass through dA whose directions lie within a small solid angle dW. Solid angle dW dA The amount of energy passing through dA and into dW in time dt in frequency range dn is: dE = In dAdtdndW Specific intensity of the radiation. † ASTR 3730: Fall 2003 Compare with definition of the flux: specific intensity is very similar except it depends upon direction and frequency as well as location. Units of specific intensity are: erg s-1 cm-2 Hz-1 steradian-1 Same as Fn Another, more intuitive name for the specific intensity is brightness. ASTR 3730: Fall 2003 Simple relation between the flux and the specific intensity: Consider a small area dA, with light rays passing through it at all angles to the normal to the surface n: n o In If q = 90 , then light rays in that direction contribute zero net flux through area dA. q For rays at angle q, foreshortening reduces the effective area by a factor of cos(q). -

Area of Polygons and Complex Figures
Geometry AREA OF POLYGONS AND COMPLEX FIGURES Area is the number of non-overlapping square units needed to cover the interior region of a two- dimensional figure or the surface area of a three-dimensional figure. For example, area is the region that is covered by floor tile (two-dimensional) or paint on a box or a ball (three- dimensional). For additional information about specific shapes, see the boxes below. For additional general information, see the Math Notes box in Lesson 1.1.2 of the Core Connections, Course 2 text. For additional examples and practice, see the Core Connections, Course 2 Checkpoint 1 materials or the Core Connections, Course 3 Checkpoint 4 materials. AREA OF A RECTANGLE To find the area of a rectangle, follow the steps below. 1. Identify the base. 2. Identify the height. 3. Multiply the base times the height to find the area in square units: A = bh. A square is a rectangle in which the base and height are of equal length. Find the area of a square by multiplying the base times itself: A = b2. Example base = 8 units 4 32 square units height = 4 units 8 A = 8 · 4 = 32 square units Parent Guide with Extra Practice 135 Problems Find the areas of the rectangles (figures 1-8) and squares (figures 9-12) below. 1. 2. 3. 4. 2 mi 5 cm 8 m 4 mi 7 in. 6 cm 3 in. 2 m 5. 6. 7. 8. 3 units 6.8 cm 5.5 miles 2 miles 8.7 units 7.25 miles 3.5 cm 2.2 miles 9. -

Right Triangles and the Pythagorean Theorem Related?
Activity Assess 9-6 EXPLORE & REASON Right Triangles and Consider △ ABC with altitude CD‾ as shown. the Pythagorean B Theorem D PearsonRealize.com A 45 C 5√2 I CAN… prove the Pythagorean Theorem using A. What is the area of △ ABC? Of △ACD? Explain your answers. similarity and establish the relationships in special right B. Find the lengths of AD‾ and AB‾ . triangles. C. Look for Relationships Divide the length of the hypotenuse of △ ABC VOCABULARY by the length of one of its sides. Divide the length of the hypotenuse of △ACD by the length of one of its sides. Make a conjecture that explains • Pythagorean triple the results. ESSENTIAL QUESTION How are similarity in right triangles and the Pythagorean Theorem related? Remember that the Pythagorean Theorem and its converse describe how the side lengths of right triangles are related. THEOREM 9-8 Pythagorean Theorem If a triangle is a right triangle, If... △ABC is a right triangle. then the sum of the squares of the B lengths of the legs is equal to the square of the length of the hypotenuse. c a A C b 2 2 2 PROOF: SEE EXAMPLE 1. Then... a + b = c THEOREM 9-9 Converse of the Pythagorean Theorem 2 2 2 If the sum of the squares of the If... a + b = c lengths of two sides of a triangle is B equal to the square of the length of the third side, then the triangle is a right triangle. c a A C b PROOF: SEE EXERCISE 17. Then... △ABC is a right triangle. -

Calculus Formulas and Theorems
Formulas and Theorems for Reference I. Tbigonometric Formulas l. sin2d+c,cis2d:1 sec2d l*cot20:<:sc:20 +.I sin(-d) : -sitt0 t,rs(-//) = t r1sl/ : -tallH 7. sin(A* B) :sitrAcosB*silBcosA 8. : siri A cos B - siu B <:os,;l 9. cos(A+ B) - cos,4cos B - siuA siriB 10. cos(A- B) : cosA cosB + silrA sirrB 11. 2 sirrd t:osd 12. <'os20- coS2(i - siu20 : 2<'os2o - I - 1 - 2sin20 I 13. tan d : <.rft0 (:ost/ I 14. <:ol0 : sirrd tattH 1 15. (:OS I/ 1 16. cscd - ri" 6i /F tl r(. cos[I ^ -el : sitt d \l 18. -01 : COSA 215 216 Formulas and Theorems II. Differentiation Formulas !(r") - trr:"-1 Q,:I' ]tra-fg'+gf' gJ'-,f g' - * (i) ,l' ,I - (tt(.r))9'(.,') ,i;.[tyt.rt) l'' d, \ (sttt rrJ .* ('oqI' .7, tJ, \ . ./ stll lr dr. l('os J { 1a,,,t,:r) - .,' o.t "11'2 1(<,ot.r') - (,.(,2.r' Q:T rl , (sc'c:.r'J: sPl'.r tall 11 ,7, d, - (<:s<t.r,; - (ls(].]'(rot;.r fr("'),t -.'' ,1 - fr(u") o,'ltrc ,l ,, 1 ' tlll ri - (l.t' .f d,^ --: I -iAl'CSllLl'l t!.r' J1 - rz 1(Arcsi' r) : oT Il12 Formulas and Theorems 2I7 III. Integration Formulas 1. ,f "or:artC 2. [\0,-trrlrl *(' .t "r 3. [,' ,t.,: r^x| (' ,I 4. In' a,,: lL , ,' .l 111Q 5. In., a.r: .rhr.r' .r r (' ,l f 6. sirr.r d.r' - ( os.r'-t C ./ 7. /.,,.r' dr : sitr.i'| (' .t 8. tl:r:hr sec,rl+ C or ln Jccrsrl+ C ,f'r^rr f 9.