IDENTIFYING TOP/BOTTOM FIELD in INTERLACED VIDEO Raja Subramanian and Sanjeev Retna Mistral Solutions Pvt Ltd., India
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Comparison of HDTV Formats Using Objective Video Quality Measures
Multimed Tools Appl DOI 10.1007/s11042-009-0441-2 Comparison of HDTV formats using objective video quality measures Emil Dumic & Sonja Grgic & Mislav Grgic # Springer Science+Business Media, LLC 2010 Abstract In this paper we compare some of the objective quality measures with subjective, in several HDTV formats, to be able to grade the quality of the objective measures. Also, comparison of objective and subjective measures between progressive and interlaced video signal will be presented to determine which scanning emission format is better, even if it has different resolution format. Several objective quality measures will be tested, to examine the correlation with the subjective test, using various performance measures. Keywords Video quality . PSNR . VQM . SSIM . TSCES . HDTV. H.264/AVC . RMSE . Correlation 1 Introduction High-Definition Television (HDTV) acceptance in home environments directly depends on two key factors: the availability of adequate HDTV broadcasts to the consumer’s home and the availability of HDTV display devices at mass market costs [6]. Although the United States, Japan and Australia have been broadcasting HDTV for some years, real interest of the general public appeared recently with the severe reduction of HDTV home equipment price. Nowadays many broadcasters in Europe have started to offer HDTV broadcasts as part of Pay-TV bouquets (like BSkyB, Sky Italia, Premiere, Canal Digital ...). Other major public broadcasters in Europe have plans for offering HDTV channels in the near future. The announcement of Blu-Ray Disc and Game consoles with HDTV resolutions has also increased consumer demand for HDTV broadcasting. The availability of different HDTV image formats such as 720p/50, 1080i/25 and 1080p/50 places the question for many users which HDTV format should be used with which compression algorithm, together with the corresponding bit rate. -
BA(Prog)III Yr 14/04/2020 Displays Interlacing and Progressive Scan
BA(prog)III yr 14/04/2020 Displays • Colored phosphors on a cathode ray tube (CRT) screen glow red, green, or blue when they are energized by an electron beam. • The intensity of the beam varies as it moves across the screen, some colors glow brighter than others. • Finely tuned magnets around the picture tube aim the electrons onto the phosphor screen, while the intensity of the beamis varied according to the video signal. This is why you needed to keep speakers (which have strong magnets in them) away from a CRT screen. • A strong external magnetic field can skew the electron beam to one area of the screen and sometimes caused a permanent blotch that cannot be fixed by degaussing—an electronic process that readjusts the magnets that guide the electrons. • If a computer displays a still image or words onto a CRT for a long time without changing, the phosphors will permanently change, and the image or words can become visible, even when the CRT is powered down. Screen savers were invented to prevent this from happening. • Flat screen displays are all-digital, using either liquid crystal display (LCD) or plasma technologies, and have replaced CRTs for computer use. • Some professional video producers and studios prefer CRTs to flat screen displays, claiming colors are brighter and more accurately reproduced. • Full integration of digital video in cameras and on computers eliminates the analog television form of video, from both the multimedia production and the delivery platform. • If your video camera generates a digital output signal, you can record your video direct-to-disk, where it is ready for editing. -

A Review and Comparison on Different Video Deinterlacing
International Journal of Research ISSN NO:2236-6124 A Review and Comparison on Different Video Deinterlacing Methodologies 1Boyapati Bharathidevi,2Kurangi Mary Sujana,3Ashok kumar Balijepalli 1,2,3 Asst.Professor,Universal College of Engg & Technology,Perecherla,Guntur,AP,India-522438 [email protected],[email protected],[email protected] Abstract— Video deinterlacing is a key technique in Interlaced videos are generally preferred in video broadcast digital video processing, particularly with the widespread and transmission systems as they reduce the amount of data to usage of LCD and plasma TVs. Interlacing is a widely used be broadcast. Transmission of interlaced videos was widely technique, for television broadcast and video recording, to popular in various television broadcasting systems such as double the perceived frame rate without increasing the NTSC [2], PAL [3], SECAM. Many broadcasting agencies bandwidth. But it presents annoying visual artifacts, such as made huge profits with interlaced videos. Video acquiring flickering and silhouette "serration," during the playback. systems on many occasions naturally acquire interlaced video Existing state-of-the-art deinterlacing methods either ignore and since this also proved be an efficient way, the popularity the temporal information to provide real-time performance of interlaced videos escalated. but lower visual quality, or estimate the motion for better deinterlacing but with a trade-off of higher computational cost. The question `to interlace or not to interlace' divides the TV and the PC communities. A proper answer requires a common understanding of what is possible nowadays in deinterlacing video signals. This paper outlines the most relevant methods, and provides a relative comparison. -

Video Terminology Video Standards Progressive Vs
VIDEO TERMINOLOGY VIDEO STANDARDS 1. NTSC - 525 Scanlines/frame rate - 30fps North & Central America, Phillipines & Taiwan . NTSC J - Japan has a darker black 2. PAL - 625 scanlines 25 fps Europe, Scandinavia parts of Asia, Pacific & South Africa. PAL in Brazil is 30fps and PAL colours 3. SECAM France Russia Middle East and North Africa PROGRESSIVE VS INTERLACED VIDEO All computer monitors use a progressive scan - each scan line in sequence. Interlacing is only for CRT monitors. LCD monitors work totally differently - no need to worry about. Interlacing is for broadcast TV. Every other line displayed alternatively. FRAME RATES As we transition from analogue video to digitla video. Film is 24 fps, PAL video 25 fps. NTSC 30fps. Actually film and NTSC are slightly different but we don't need to worry about that for now. IMAGE SIZE All video is shot at 72 px/inch - DV NTSC - 720 x 480 (SD is 720 x 486) DV PAL - 720 x 576 (SD PAL is 720 x 576) HD comes in both progressive and interlaced. HD480i is usual broadcast TV 480p is 480 progressive. 720i is 720 interlaced 720p is progressive. 720 means 720 vertical lines 1080 is 1080 vertical lines. 1080i is most popular. 720p is 1280 x 720, HD 1080 is 1920x1080px. All HD formats are 16:9 aspect ratio. Traditional TV is 4:3 aspect ratio. HDV is 1440 x 1080. New format - is it the new HD version of DV? Cameras like the Sony and JVC make minor alterations to this format when shooting In summary HD 1080i = 1920 x 1080 HD 720p = 1280 x 720 Traditional = 720 x 480 (NTSC) 720 x 576 (PAL) VIDEO OUTPUTS Analog Composite, S-Video, Component in increasing quality. -

Adobe Premiere Elements 13
ADOBE® PREMIERE® ELEMENTS HELP Legal notices Legal notices For legal notices, see http://help.adobe.com/en_US/legalnotices/index.html. Last updated 9/23/2014 iii Contents Chapter 1: What's new What's new in Adobe Premiere Elements 13 . .1 What's new in Elements Organizer 13 . .6 Chapter 2: Workspace Workspace . .9 Chapter 3: Creating a video project Create a video story . 14 Creating a project . 19 Saving and backing up projects . 21 Project settings and presets . 22 Viewing a project’s files . 25 Undoing changes . 27 Working with scratch disks . 27 Creating instant movies . 29 Previewing movies . 31 Viewing clip properties . 36 Chapter 4: Importing and adding media Supported devices and file formats . 39 Guidelines for adding files . 40 Adding media into Adobe Premiere Elements . 43 Creating specialty clips . 48 5.1 audio import . 49 Add numbered image files as a single clip . 50 Set duration for imported still images . 50 Working with aspect ratios and field options . 51 Set duration for imported still images . 54 Add numbered image files as a single clip . 55 Sharing files between Adobe Premiere Elements and Adobe Photoshop Elements . 55 Working with offline files . 56 Chapter 5: Arranging movie clips Arranging clips in the Quick view timeline . 58 Arranging clips in the Expert view timeline . 60 Creating a picture-in-picture overlay . 67 Grouping, linking, and disabling clips . 68 Working with clip and timeline markers . 70 Chapter 6: Editing clips Stabilize video footage with Shake Stabilizer . 74 Trimming clips . 77 Split clips . 84 Last updated 9/23/2014 ADOBE PREMIERE ELEMENTS iv Contents Replace footage . -

High Frame-Rate Television
Research White Paper WHP 169 September 2008 High Frame-Rate Television M Armstrong, D Flynn, M Hammond, S Jolly, R Salmon BRITISH BROADCASTING CORPORATION BBC Research White Paper WHP 169 High Frame-Rate Television M Armstrong, D Flynn, M Hammond, S Jolly, R Salmon Abstract The frame and field rates that have been used for television since the 1930s cause problems for motion portrayal, which are increasingly evident on the large, high-resolution television displays that are now common. In this paper we report on a programme of experimental work that successfully demonstrated the advantages of higher frame rate capture and display as a means of improving the quality of television systems of all spatial resolutions. We identify additional benefits from the use of high frame-rate capture for the production of programmes to be viewed using conventional televisions. We suggest ways to mitigate some of the production and distribution issues that high frame-rate television implies. This document was originally published in the proceedings of the IBC2008 conference. Additional key words: static, dynamic, compression, shuttering, temporal White Papers are distributed freely on request. Authorisation of the Head of Broadcast/FM Research is required for publication. © BBC 2008. All rights reserved. Except as provided below, no part of this document may be reproduced in any material form (including photocopying or storing it in any medium by electronic means) without the prior written permission of BBC Future Media & Technology except in accordance with the provisions of the (UK) Copyright, Designs and Patents Act 1988. The BBC grants permission to individuals and organisations to make copies of the entire document (including this copyright notice) for their own internal use. -

Video Source File Specifications
Video Source File Specifications Limelight recommends the following specifications for all video source files. Adherence to these specifications will result in optimal playback quality and efficient uploading to your account. Edvance360 Best Practices Videos should be under 1 Gig for best results (download speed and mobile devices), but our limit per file is 2 Gig for Lessons MP4 is the optimum format for uploading videos Compress the video to resolution of 1024 x 768 Limelight does compress the video, but it's best if it's done on the original file A resolution is 1080p or less is recommended Recommended frame rate is 30fps Note: The maximum file size for Introduction Videos in Courses is 50MB. This is located in Courses > Settings > Details > Introduction Video. Ideal Source File In general, a source file that represents the following will produce the best results: MP4 file (H.264/ACC-LC) Fast Start (MOOV atom at the front of file) Progressive scan (no interlacing) Frame rate of 24 (23.98), 25, or 30 (29.97) fps A Bitrate between 5,000 - 8,000 Kbps 720p resolution Detailed Recommendations The table below provides detailed recommendations (CODECs, containers, Bitrates, resolutions, etc.) for all video source material uploaded to a Limelight Account: Source File Element Recommendations Video CODEC Recommended CODEC: H.264 Accepted but not Recommended: MPEG-1, MPEG-2, MPEG-4, VP6, VP5, H.263, Windows Media Video 7 (WMV1), Windows Media Video 8 (WMV2), Windows Media Video 9 (WMV3) Audio CODEC Recommended CODEC: AAC-LC Accepted but not Recommended: MP3, MP2, WMA, WMA Pro, PCM, WAV Container MP4 Source File Element Recommendations Fast-Start Make sure your source file is created with the 'MOOV atom' at the front of the file. -
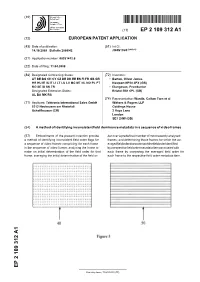
A Method of Identifying Inconsistent Field Dominance Metadata in a Sequence of Video Frames
(19) & (11) EP 2 109 312 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 14.10.2009 Bulletin 2009/42 H04N 5/44 (2006.01) (21) Application number: 08251412.6 (22) Date of filing: 11.04.2008 (84) Designated Contracting States: (72) Inventors: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR • Barton, Oliver James HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT Newport NP20 3PX (GB) RO SE SI SK TR • Elangovan, Premkumar Designated Extension States: Bristol BS1 6PL (GB) AL BA MK RS (74) Representative: Wardle, Callum Tarn et al (71) Applicant: Tektronix International Sales GmbH Withers & Rogers LLP 8212 Neuhausen am Rheinfall Goldings House Schaffhausen (CH) 2 Hays Lane London SE1 2HW (GB) (54) A method of identifying inconsistent field dominance metadata in a sequence of video frames (57) Embodiments of the present invention provide der over a predefined number of most recently analysed a method of identifying inconsistent field order flags for frames; and determining those frames for which the av- a sequence of video frames comprising: for each frame eraged field order does not match the field order identified in the sequence of video frames analysing the frame to by a respective field order metadata item associated with make an initial determination of the field order for that each frame by comparing the averaged field order for frame; averaging the initial determination of the field or- each frame to the respective field order metadata item. EP 2 109 312 A1 Printed by Jouve, 75001 PARIS (FR) EP 2 109 312 A1 Description [0001] Video frames can be classified as either progressive or interlaced, depending upon the method used to display them. -
Alchemist File - Understanding Cadence
GV File Understanding Cadence Alchemist File - Understanding Cadence Version History Date Version Release by Reason for changes 27/08/2015 1.0 J Metcalf Document originated (1st proposal) 09/09/2015 1.1 J Metcalf Rebranding to Alchemist File 19/01/2016 1.2 G Emerson Completion of rebrand 07/10/2016 1.3 J Metcalf Updated for additional cadence controls added in V2.2.3.2 12/10/2016 1.4 J Metcalf Added Table of Terminology 11/12/2018 1.5 J Metcalf Rebrand for GV and update for V4.*** 16/07/2019 1.6 J Metcalf Minor additions & corrections 05/03/2021 1.7 J Metcalf Rebrand 06/09/2021 1.8 J Metcalf Add User Case (case 9) Version Number: 1.8 © 2021 GV Page 2 of 53 Alchemist File - Understanding Cadence Table of Contents 1. Introduction ............................................................................................................................................... 6 2. Alchemist File Input Cadence controls ................................................................................................... 7 2.1 Input / Source Scan - Scan Type: ............................................................................................................ 7 2.1.1 Incorrect Metadata ............................................................................................................................ 8 2.1.2 Psf Video sources ............................................................................................................................. 9 2.2 Input / Source Scan - Field order .......................................................................................................... -

Hdtv (High Definition Television)
WHITE PAPER HDTV (High DefinitionT elevision) and video surveillance Table of contents Introduction 3 1. HDTV impact on video surveillance market 3 2. Development of HDTV 3 3. How HDTV works 4 4. HDTV standardization 6 5. HDTV formats 6 6. Benefits ofH DTV in video surveillance 6 7. Conclusion 7 Introduction The TV market is moving rapidly towards high-definition television, HDTV. This change brings truly re- markable improvements in image quality and color fidelity. HDTV provides up to five times higher resolu- tion and twice the linear resolution compared with traditional, analog TV. Furthermore, HDTV comes with wide screen format and DVD-quality audio. Growth in the consumer market for HDTV is impressive. In 2007 the HDTV household penetration in the U.S. was approximately 35%. According to estimates, 85% of all viewers will have an HDTV set at home by 2012. Already today, virtually all major television productions are HD. The two most important HDTV standards today are SMPTE 296M and SMPTE 274M, which are defined by the Society of Motion Picture and Television Engineers, SMPTE. 1. HDTV impact on video surveillance market This development is now starting to have an impact on the video surveillance market, as customers ask for higher image quality standard. The possibility of clearer, sharper images is a long sought quality in the surveillance industry, i.e. in applications where objects are moving or accurate identification is vital. It can be argued that some of these requirements can be met with megapixel network cameras. How- ever the notion of “megapixel” is not a recognized standard but rather an adaptation of the industry’s best practices and it refers specifically to the number of image sensor elements of the digital camera. -

Video Processor, Video Upconversion & Signal Switching
81LumagenReprint 3/1/04 1:01 PM Page 1 Equipment Review Lumagen VisionPro™ Video Processor, Video Upconversion & Signal Switching G REG R OGERS Lumagen VisionPro™ Reviewer’s Choice The Lumagen VisionPro™ Video Processor is the type of product that I like to review. First and foremost, it delivers excep- tional performance. Second, it’s an out- standing value. It provides extremely flexi- ble scaling functions and valuable input switching that isn’t included on more expen- sive processors. Third, it works as adver- tised, without frustrating bugs or design errors that compromise video quality or ren- Specifications: der important features inoperable. Inputs: Eight Programmable Inputs (BNC); Composite (Up To 8), S-Video (Up To 8), Manufactured In The U.S.A. By: Component (Up To 4), Pass-Through (Up To 2), “...blends outstanding picture SDI (Optional) Lumagen, Inc. Outputs: YPbPr/RGB (BNC) 15075 SW Koll Parkway, Suite A quality with extremely Video Processing: 3:2 & 2:2 Pulldown Beaverton, Oregon 97006 Reconstruction, Per-Pixel Motion-Adaptive Video Tel: 866 888 3330 flexible scaling functions...” Deinterlacing, Detail-Enhancing Resolution www.lumagen.com Scaling Output Resolutions: 480p To 1080p In Scan Line Product Overview Increments, Plus 1080i Dimensions (WHD Inches): 17 x 3-1/2 x 10-1/4 Price: $1,895; SDI Input Option, $400 The VisionPro ($1,895) provides two important video functions—upconversion and source switching. The versatile video processing algorithms deliver extensive more to upconversion than scaling. Analog rithms to enhance edge sharpness while control over input and output formats. Video source signals must be digitized, and stan- virtually eliminating edge-outlining artifacts. -

Be) (Bexncbe) \(Be
US 20090067508A1 (19) United States (12) Patent Application Publication (10) Pub. No.: US 2009/0067508 A1 Wals (43) Pub. Date: Mar. 12, 2009 (54) SYSTEMAND METHOD FOR BLOCK-BASED Related U.S. Application Data PER-PXEL CORRECTION FOR FILMI-BASED SOURCES (60) Provisional application No. 60/971,662, filed on Sep. 12, 2007. (75) Inventor: Edrichters als Publication Classification (51) Int. Cl. Correspondence Address: H04N II/02 (2006.01) LAW OFFICE OF OUANES. KOBAYASH P.O. Box 4160 (52) U.S. Cl. ............................ 375/240.24; 375/E07.076 Leesburg, VA 20177 (US) (57) ABSTRACT (73) Assignee: Broadcom Corporation, Irvine, A system and method for block-based per-pixel correction for CA (US) film-based sources. The appearance of mixed film/video can be improved through an adaptive selection of normal deinter (21) Appl. No.: 12/105,664 laced video relative to inverse telecine video. This adaptive selection process is based on pixel difference measures of (22)22) Filed: Apr.pr. 18,18, 2008 sub-blocks within defined blocks of ppixels. SOURCE FILM FRAMES Frame 1 Frame 2 Fram Frame 4 Frame 5 Frame 6 INTERLACED 3:2 VIDEO (BE) 9.(BE) (BEXNCBE)( \(BE). FIELD PHASE DEINTERLACED FRAMES USING REVERSE 3:2 SOURCE OF f BWD WD AWG B WD B FWD AWG B) FWD BD MISSING FIELD Patent Application Publication Mar. 12, 2009 Sheet 1 of 4 US 2009/0067508 A1 I'61) CIE?OV/THE_LNIEC] €)NISTSEIN\/H-] Z.8ESHE/\EH Patent Application Publication Mar. 12, 2009 Sheet 2 of 4 US 2009/0067508 A1 W9. s W9. US 2009/0067508 A1 Mar.