FPGA, Na Qual É Instanciado Um Microprocessador E Periféricos
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2.4/5 Ghz Dual-Band 1X1 Wi-Fi 5 (802.11Ac) and Bluetooth 5.2 Solution Rev
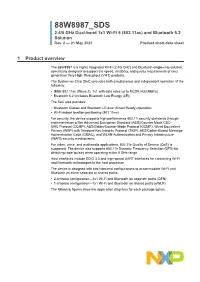
88W8987_SDS 2.4/5 GHz Dual-band 1x1 Wi-Fi 5 (802.11ac) and Bluetooth 5.2 Solution Rev. 2 — 21 May 2021 Product short data sheet 1 Product overview The 88W8987 is a highly integrated Wi-Fi (2.4/5 GHz) and Bluetooth single-chip solution, specifically designed to support the speed, reliability, and quality requirements of next generation Very High Throughput (VHT) products. The System-on-Chip (SoC) provides both simultaneous and independent operation of the following: • IEEE 802.11ac (Wave 2), 1x1 with data rates up to MCS9 (433 Mbit/s) • Bluetooth 5.2 (includes Bluetooth Low Energy (LE)) The SoC also provides: • Bluetooth Classic and Bluetooth LE dual (Smart Ready) operation • Wi-Fi indoor location positioning (802.11mc) For security, the device supports high performance 802.11i security standards through implementation of the Advanced Encryption Standard (AES)/Counter Mode CBC- MAC Protocol (CCMP), AES/Galois/Counter Mode Protocol (GCMP), Wired Equivalent Privacy (WEP) with Temporal Key Integrity Protocol (TKIP), AES/Cipher-Based Message Authentication Code (CMAC), and WLAN Authentication and Privacy Infrastructure (WAPI) security mechanisms. For video, voice, and multimedia applications, 802.11e Quality of Service (QoS) is supported. The device also supports 802.11h Dynamic Frequency Selection (DFS) for detecting radar pulses when operating in the 5 GHz range. Host interfaces include SDIO 3.0 and high-speed UART interfaces for connecting Wi-Fi and Bluetooth technologies to the host processor. The device is designed with two front-end configurations to accommodate Wi-Fi and Bluetooth on either separate or shared paths: • 2-antenna configuration—1x1 Wi-Fi and Bluetooth on separate paths (QFN) • 1-antenna configuration—1x1 Wi-Fi and Bluetooth on shared paths (eWLP) The following figures show the application diagrams for each package option. -
802.11 Arbitration
802.11 Arbitration White Paper September 2009 Version 1.00 Author: Marcus Burton, CWNE #78 CWNP, Inc. [email protected] Technical Reviewer: GT Hill, CWNE #21 [email protected] Copyright 2009 CWNP, Inc. www.cwnp.com Page 1 Table of Contents TABLE OF CONTENTS ............................................................................................................................... 2 EXECUTIVE SUMMARY ............................................................................................................................. 3 Approach / Intent ................................................................................................................................... 3 INTRODUCTION TO 802.11 CHANNEL ACCESS ................................................................................... 4 802.11 MAC CHANNEL ACCESS ARCHITECTURE ............................................................................... 5 Distributed Coordination Function (DCF) ............................................................................................. 5 Point Coordination Function (PCF) ...................................................................................................... 6 Hybrid Coordination Function (HCF) .................................................................................................... 6 Summary ................................................................................................................................................ 7 802.11 CHANNEL ACCESS MECHANISMS ........................................................................................... -
Module 4: Table of Contents
Data Communications(15CS46) 4th Sem CSE & ISE MODULE 4: TABLE OF CONTENTS INTRODUCTION RANDOM ACCESS PROTOCOL ALOHA Pure ALOHA Vulnerable time Throughput Slotted ALOHA Throughput CSMA Vulnerable Time Persistence Methods CSMA/CD Minimum Frame-size Procedure Energy Level Throughput CSMA/CA Frame Exchange Time Line Network Allocation Vector Collision During Handshaking Hidden-Station Problem CSMA/CA and Wireless Networks CONTROLLED ACCESS PROTOCOL Reservation Polling Token Passing Logical Ring CHANNELIZATION FDMA TDMA CDMA Implementation Chips Data Representation Encoding and Decoding Sequence Generation ETHERNET PROTOCOL IEEE Project 802 Ethernet Evolution STANDARD ETHERNET Characteristics Connectionless and Unreliable Service Frame Format Frame Length Addressing Access Method Efficiency of Standard Ethernet Implementation Encoding and Decoding Changes in the Standard Bridged Ethernet Dept. of ISE,CITECH 1 Data Communications(15CS46) 4th Sem CSE & ISE Switched Ethernet Full-Duplex Ethernet FAST ETHERNET (100 MBPS) Access Method Physical Layer Topology Implementation Encoding GIGABIT ETHERNET MAC Sublayer Physical Layer Topology Implementation Encoding TEN GIGABIT ETHERNET Implementation INTRODUCTION OF WIRELESS-LANS Architectural Comparison Characteristics Access Control IEEE 802.11 PROJECT Architecture BSS ESS Station Types MAC Sublayer DCF Network Allocation Vector Collision During Handshaking PCF Fragmentation Frame Types Frame Format Addressing Mechanism Exposed Station Problem Physical Layer IEEE 802.11 FHSS IEEE 802.11 DSSS IEEE 802.11 Infrared IEEE 802.11a OFDM IEEE 802.11b DSSS IEEE 802.11g BLUETOOTH Architecture Piconets Scatternet Bluetooth Devices Bluetooth Layers Radio Layer Baseband Layer TDMA Links Frame Types Frame Format L2CAP Dept. of ISE,CITECH 2 Data Communications(15CS46) 4th Sem CSE & ISE MODULE 4: MULTIPLE ACCESS 4.1 Introduction When nodes use shared-medium, we need multiple-access protocol to coordinate access to medium. -
Technical Report No
ENGINEERING FACULTY,UNIVERSITY OF PORTO Technical Report no: 1 Robson Costa Supervisor: Paulo Portugal (Ph.D.) Co-supervisor: Francisco Vasques (Ph.D.) Co-supervisor: Ricardo Moraes (Ph.D.) 2010, September c Robson Costa, 2010 Contents List of Figures ii List of Tables iii List of Abbreviations iv 1 Introduction1 1.1 Benefits . .2 1.2 Challenges . .2 2 IEEE 802.11 Standard4 2.1 IEEE 802.11 Medium Access Mechanisms . .5 2.1.1 DCF - Distributed Coordination Function . .6 2.1.2 PCF - Point Coordination Function . .7 2.1.3 EDCA - Enhanced Distributed Channel Access . .9 2.1.4 HCCA - HCF Controlled Channel Access . 11 3 IEEE 802.11n Amendment 14 3.1 PHY Enhancements . 15 3.1.1 MIMO - Multiple-Input Multiple-Output ................. 15 3.1.2 Channel-bonding . 17 3.2 MAC Enhancements . 18 3.2.1 Frame aggregation . 19 3.2.2 Block ACK . 21 3.2.3 Reverse Direction Protocol . 22 4 Review of Relevant Work 23 4.1 Real-Time communication in IEEE 802.11 . 23 4.1.1 CA - Collision Avoidance . 23 4.1.2 CS - Collision Solver . 26 4.1.3 CR - Collision Reducer . 27 4.2 Comparison of the solutions presented . 30 5 Conclusion 31 References 37 i List of Figures 2.1 Original IEEE 802.11 MAC architecture [1]....................5 2.2 IEEE 802.11e MAC architecture [2].........................5 2.3 Interframe spaces in the DCF and PCF mechanisms [1]. .6 2.4 DCF service [2]....................................6 2.5 PCF service [2]....................................8 2.6 CFP foreshortening [2]................................9 2.7 Interframe spaces in the EDCA mechanism [2]. -
802.11N-Draftstd June2009.Pdf
IEEE P802.11n/D11.0, June 2009 1 2 IEEE P802.11n™/D11.0 3 4 5 6 7 Draft STANDARD for 8 9 10 Information Technology— 11 12 13 Telecommunications and information exchange 14 15 between systems— 16 17 18 Local and metropolitan area networks— 19 20 Specific requirements 21 22 23 24 25 26 Part 11: Wireless LAN Medium Access Control 27 28 (MAC) and Physical Layer (PHY) specifications 29 30 31 32 33 Amendment 5: Enhancements for Higher 34 35 36 Throughput 37 38 39 40 41 Prepared by the 802.11 Working Group of the 802 Committee 42 43 Copyright © 2009 by the IEEE. 44 Three Park Avenue 45 46 New York, NY 10016-5997, USA 47 48 All rights reserved. 49 50 51 This document is an unapproved draft of a proposed IEEE Standard. As such, this document is subject to 52 change. USE AT YOUR OWN RISK! Because this is an unapproved draft, this document must not be uti- 53 lized for any conformance/compliance purposes. Permission is hereby granted for IEEE Standards Commit- 54 55 tee participants to reproduce this document for purposes of international standardization consideration. Prior 56 to adoption of this document, in whole or in part, by another standards development organization, permis- 57 sion must first be obtained from the IEEE Standards Activities Department ([email protected]). Other enti- 58 ties seeking permission to reproduce this document, in whole or in part, must also obtain permission from 59 the IEEE Standards Activities Department. 60 61 IEEE Standards Activities Department 62 63 445 Hoes Lane 64 65 Piscataway, NJ 08854, USA Copyright © 2009 IEEE. -

C Copyright 2015 Farzad Hessar
c Copyright 2015 Farzad Hessar Spectrum Sharing in White Spaces Farzad Hessar A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Washington 2015 Reading Committee: Sumit Roy, Chair John D. Sahr Archis Vijay Ghate Program Authorized to Offer Degree: Electrical Engineering University of Washington Abstract Spectrum Sharing in White Spaces Farzad Hessar Chair of the Supervisory Committee: Professor Sumit Roy Electrical Engineering Demand for wireless Internet traffic has been increasing exponentially over the last decade, due to widespread usage of smart-phones along with new multimedia applications. The need for higher wireless network throughput has been pushing engineers to expand network capacities in order to keep pace with growing user demands. The improvement has been multi-dimensional, including optimizations in MAC/Physical layer for boosting spectral efficiency, expanding network infrastructure with reduced cell sizes, and utilizing additional RF spectrum. Nevertheless, traffic demand has been increasing at a much faster pace than network throughput and our current networks will not be able to handle customer needs in near future. While assigning additional spectrum for cellular communication has been a major ele- ment of network capacity increase, the natural scarcity of RF spectrum limits the extend of this solution. On the other hand, researchers have shown that licensed spectrum that is owned and held by a primary user is heavily underutilized. Examples are TV channels in the VHF/UHF band as well as radar spectrum in the SHF band. Hence, a more efficient use of this spectrum is to permit unlicensed users to coexist with the primary owner, i.e. -

2.4 Ghz/5 Ghz Dual-Band 1X1 Wi-Fi 4 and Bluetooth 5.2 Combo Soc Rev
88W8977_SDS 2.4 GHz/5 GHz Dual-band 1x1 Wi-Fi 4 and Bluetooth 5.2 Combo SoC Rev. 3 — 13 May 2021 Product short data sheet 1 Product overview The 88W8977 System-on-Chip (SoC) is a highly integrated single-chip solution that incorporates both Wi-Fi® (2.4/5 GHz) and Bluetooth® technology. The System-on-Chip (SoC) provides both simultaneous and independent operation of the following: • IEEE 802.11n compliant, 1x1 spatial stream with data rates up to MCS7 (150 Mbps) • Bluetooth 5.2 (includes Bluetooth Low Energy (LE)) The SoC also provides 3-way coexistence for Wi-Fi, Bluetooth, and ZigBee operation, and indoor location and navigation (802.11mc). The internal coexistence arbitration and a Mobile Wireless Systems (MWS) serial transport interface provide the functionality for connecting an external Long Term Evolution (LTE) or ZigBee device. The device also supports a coexistence interface for co-located Bluetooth/Wi-Fi device arbitration. For security, the device supports high performance 802.11i security standards through the implementation of the Advanced Encryption Standard (AES)/Counter Mode CBC- MAC Protocol (CCMP), Wired Equivalent Privacy (WEP) with Temporal Key Integrity Protocol (TKIP), AES/Cipher-Based Message Authentication Code (CMAC), WPA (AES), and Wi-Fi Authentication and Privacy Infrastructure (WAPI) security mechanisms. For video, voice, and multimedia applications, 802.11e Quality of Service (QoS) is supported. The device also features 802.11h Dynamic Frequency Selection (DFS) for detecting radar pulses when operating in the 5 GHz range. Host interfaces include SDIO 3.0 and high-speed UART interfaces for connecting Wi-Fi and Bluetooth technologies to the host processor. -

Wireless Networks and MAC Protocols
Wireless Networks and MAC Protocols Embedded Networks 11 1 J. Kaiser, IVS-EOS Some Wireless Technologies Embedded Networks 11 2 J. Kaiser, IVS-EOS Wireless Technology Comparison Chart Standard Fre- Bandwidth Tx-Power Range Goal Application quency (EIRP) 802.11 2,4 GHz <= 600 MBit/s 100 mW 250 m High Data Internet Wlan 5 GHz Rate Sharing, Media Streaming, File Transfer 802.15.1 2,4 GHz <= 2,1 MBit/s 100 mW 100 m Low Power, Handsfree, Bluetooth 2,5 mW 10 m Ease of Use, Cable 1mW 5m Security Replacement 802.15.4 0,8 GHz <= 20 kBit/s 1 mW 10 m Ultra-Low- Sensor Zigbee 0,9 GHz <= 40 kBit/s Power, networks, 2,4 GHz <= 250 kBit/s Timing Remote Guarentees control Embedded Networks 11 3 J. Kaiser, IVS-EOS IEEE 802.11 IEEE 802.11 MAC Layer MAC Architektur: Contention- Free Contention Services Services Point Coordination Function (PCF) (optional) Distributed Coordination Function (DCF) Embedded Networks 11 4 J. Kaiser, IVS-EOS IEEE 802.11 Distributed Coordination Function (DCF) • CSMA/CA Protocol • Collision Avoidance by random backoff procedure (p-persistent) • All Frames are acknowledged, lost Frames are resend • Priority Access by Interframe Space (IFS) => fair arbitration but no real-time support Embedded Networks 11 5 J. Kaiser, IVS-EOS Relationship of different IFSs in 802.11 DIFS DIFS Contention Window PIFS SIFS Busy Medium Backoff-Window Next frame Slot time Defer Access DIFS: DCF Interframe Space PIFS: PCF Interframe Space SIFS: Short Interframe Space Embedded Networks 11 6 J. Kaiser, IVS-EOS IEEE 802.11 Network STA Types ad-hoc network CELL STA STA infrastructure network STA STA CELL CELL DS: Distribution System STA IEEE 802.X AP STA AP Access Point Embedded Networks 11 7 J. -

Local Area Networks: Ethernet
LANs 1 Local Area Networks: Ethernet Prof. Jean-Yves Le Boudec Prof. Andrzej Duda Prof. Patrick Thiran ICA, EPFL CH-1015 Ecublens [email protected] http://icawww.epfl.ch LANs 2 Objective o Understand shared medium access methods of Ethernet; o Describe network aspects of an Ethernet network; PART A: The CSMA/CD method PART B: Network Aspects (Ethernet) PART C: CSMA/CA and wireless LANs The access method is a way of sharing a common transmission medium (cable, wireless link) between several hosts. Ethernet is built upon the medium access method called CSMA/CD (Carrier Sense Multiple Access/Collision Detection). The network aspects explain how a local area network is built today. We will see that the resulting network is very far away from the original design. LANs 3 Part A: Motivation for LANs o goal: connect computers in same site (building, small campus) o experience from host centric networks:bursty traffic o basic idea: share a cable, no complex software in the end systems o alternatives ? switch based LANs: connection oriented: ATM switch based LANs: connectionless. Switched Ethernet If you want to understand something in the world of local area networks, you should keep in mind the design requirements. Today, they are: •(1) interconnect many pieces of equipment without complex cabling, inside a limited geographical area, and inside one organization •(2a) be easy to manage, in particular, detect cable faults easily. When Ethernet was first conceived, the requirements were a little bit different. The second requirement was replaced by: •(2b) use one shared cable for the entire network. -

UNIT-5 IEEE STANDARDS 1 IEEE Stands
UNIT-5 IEEE STANDARDS IEEE stands for “Institute of Electrical and Electronics Engineers”. IEEE was founded in the year 1884. Project 802 is one of the famous projects regarding to IEEE. This project contains the features which are lead to the essential development in LAN and its usage. Project 802 sets high-level standards in components that are using in inter-communication between systems. Any manufacturer must follow the standards while preparing the components. IEEE also provides the support for OSI reference model and its supported layers. Especially for Data link layer and Physical layer. According OSI reference model data link layer and physical layer is performing the most of the responsibility in data transfer. Generally LAN is used for connecting limited group of systems in limited area. LAN can provide sharing of resources. LAN concept is also supporting WAN or internet. LAN is one of the mostly used technologies. LAN is having several technologies (versions): 1) Ethernet. 2) Token Ring. 3) Token Bus. 4) ATM LAN. IEEE provides supports for any type of LAN version and also working along with Data link and physical layer. Data Link Layer: The IEEE has subdivided the data link layer into two sub layers: 1) Logical Link Control (LLC). 2) Media Access Control (MAC). IEEE has also created several physical layer standards for different LAN protocols. 1 UNIT-5 IEEE STANDARDS We know that data link control handles framing, flow control, and error control. In IEEE Project 802, flow control, error control, and part of the framing duties are collected into one sub layer called the logical link control. -

Enabling Channel Bonding in High-Density Wlans
To Overlap or not to Overlap: Enabling Channel Bonding in High-Density WLANs Sergio Barrachina-Mu˜noz∗, Francesc Wilhelmi, Boris Bellalta Wireless Networking (WN), Universitat Pompeu Fabra, Barcelona, Spain Abstract Wireless local area networks (WLANs) are the most popular kind of wireless Internet connection because of their simplicity of deployment and operation. As a result, the number of devices accessing the Internet through WLANs such as laptops, smartphones, or wearables, is increasing drastically at the same time that applications’ throughput requirements do. To cope with these challenges, channel bonding (CB) techniques are used for enabling higher data rates by transmitting in wider channels, thus increasing spectrum efficiency. However, important issues like higher potential co-channel and adjacent channel interference arise when bonding channels. This may harm the performance of the carrier sense multiple access (CSMA) protocol because of recurrent backoff freezing, while making nodes more sensitive to hidden node effects. In this paper, we address the following point at issue: is it convenient for high-density (HD) WLANs to use wider channels and potentially overlap in the spectrum? First, we highlight key aspects of DCB in toy scenarios through a continuous time Markov network (CTMN) model. Then, by means of extensive simulations covering a wide range of traffic loads and access point (AP) densities, we show that dynamic channel bonding (DCB) – which adapts the channel bandwidth on a per-packet transmission – significantly outperforms traditional single-channel on average. Nevertheless, results also corroborate that DCB is more prone to generate unfair situations where WLANs may starve. Contrary to most of the current thoughts pushing towards non-overlapping channels in HD deployments, we highlight the benefits of allocating channels as wider as possible to WLANs altogether with implementing adaptive access policies to cope with the unfairness situations that may appear. -

A Real-Time Multimedia Streaming Protocol for Wireless Networks Hans Scholten, Pierre Jansen, Ferdy Hanssen, Wietse Mank and Arjan Zwikker
1 A Real-Time Multimedia Streaming Protocol for Wireless Networks Hans Scholten, Pierre Jansen, Ferdy Hanssen, Wietse Mank and Arjan Zwikker University of Twente, Department of Computer Science (EEMCS), Enschede, the Netherlands Email: scholten, jansen, hanssen @cs.utwente.nl Abstract— This paper describes a new token-based specified by passing a period and a required bandwidth to medium access protocol for real-time networks and its the network socket. The scheduler then decides whether implementation on a wireless network. Originally, the the new network configuration is feasible and if it is, the protocol is developed for use in low cost domestic or scheduler calculates a new PEDF schedule for all the home networks that are based on Ethernet hardware. streams in the network. The most important aspects of In contrast to existing protocols the token is assigned to network nodes on basis of a pre-emptive earliest the real-time network protocol will be described next. deadline first (PEDF) schedule of the multimedia streams. For a more detailed explanation see [3] or [4]. The scheduler is distributed over all active nodes in the network. Although other schedulers could be used, PEDF A. The Scheduler is chosen because it has a theoretical bandwidth utilization of one hundred percent and feasibility analysis is very The scheduler is a pre-emptive earliest deadline first simple, so even simple devices can participate in such a scheduler. As the name already indicates, this scheduler network. This is confirmed by simulation experiments and schedules the stream with the earliest deadline first. It is a prototype based on Ethernet hardware.