Performance Testing for High-Speed Train Tracing and an Approach-Alarming System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Landscape Analysis of Geographical Names in Hubei Province, China
Entropy 2014, 16, 6313-6337; doi:10.3390/e16126313 OPEN ACCESS entropy ISSN 1099-4300 www.mdpi.com/journal/entropy Article Landscape Analysis of Geographical Names in Hubei Province, China Xixi Chen 1, Tao Hu 1, Fu Ren 1,2,*, Deng Chen 1, Lan Li 1 and Nan Gao 1 1 School of Resource and Environment Science, Wuhan University, Luoyu Road 129, Wuhan 430079, China; E-Mails: [email protected] (X.C.); [email protected] (T.H.); [email protected] (D.C.); [email protected] (L.L.); [email protected] (N.G.) 2 Key Laboratory of Geographical Information System, Ministry of Education, Wuhan University, Luoyu Road 129, Wuhan 430079, China * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel: +86-27-87664557; Fax: +86-27-68778893. External Editor: Hwa-Lung Yu Received: 20 July 2014; in revised form: 31 October 2014 / Accepted: 26 November 2014 / Published: 1 December 2014 Abstract: Hubei Province is the hub of communications in central China, which directly determines its strategic position in the country’s development. Additionally, Hubei Province is well-known for its diverse landforms, including mountains, hills, mounds and plains. This area is called “The Province of Thousand Lakes” due to the abundance of water resources. Geographical names are exclusive names given to physical or anthropogenic geographic entities at specific spatial locations and are important signs by which humans understand natural and human activities. In this study, geographic information systems (GIS) technology is adopted to establish a geodatabase of geographical names with particular characteristics in Hubei Province and extract certain geomorphologic and environmental factors. -
Spatial-Temporal Features of Wuhan Urban Agglomeration Regional Development Pattern—Based on DMSP/OLS Night Light Data
Journal of Building Construction and Planning Research, 2017, 5, 14-29 http://www.scirp.org/journal/jbcpr ISSN Online: 2328-4897 ISSN Print: 2328-4889 Spatial-Temporal Features of Wuhan Urban Agglomeration Regional Development Pattern—Based on DMSP/OLS Night Light Data Mengjie Zhang1*, Wenwei Miao1, Yingpin Yang2, Chong Peng1, Yaping Huang1 1School of Architecture and Urban Planning, Huazhong University of Science and Technology, Wuhan, China 2Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing, China How to cite this paper: Zhang, M.J., Miao, Abstract W.W., Yang, Y.P., Peng, C. and Huang, Y.P. (2017) Spatial-Temporal Features of Wu- Based on the night light data, urban area data, and economic data of Wuhan han Urban Agglomeration Regional De- Urban Agglomeration from 2009 to 2015, we use spatial correlation dimen- velopment Pattern—Based on DMSP/OLS sion, spatial self-correlation analysis and weighted standard deviation ellipse Night Light Data. Journal of Building Con- struction and Planning Research, 5, 14-29. to identify the general characteristics and dynamic evolution characteristics of https://doi.org/10.4236/jbcpr.2017.51002 urban spatial pattern and economic disparity pattern. The research results prove that: between 2009 and 2013, Wuhan Urban Agglomeration expanded Received: February 3, 2017 Accepted: March 5, 2017 gradually from northwest to southeast and presented the dynamic evolution Published: March 8, 2017 features of “along the river and the road”. The spatial structure is obvious, forming the pattern of “core-periphery”. The development of Wuhan Urban Copyright © 2017 by authors and Agglomeration has obvious imbalance in economic geography space, pre- Scientific Research Publishing Inc. -
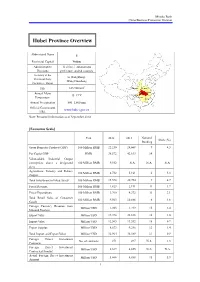
Hubei Province Overview
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No. -

World Bank Document
E1678 V2 Public Disclosure Authorized Mid-term Adjustment for WB Financed Han River Urban Environment Improvement Project Public Disclosure Authorized Report on Environment Management Plan Public Disclosure Authorized WB Financed Han River Basin Pollution Control PMO Public Disclosure Authorized The JV of Hubei Xinbao Science & Technology Co. Ltd and Wuhan University January 2014 Table of Content Chapter I Summary ...................................................................................................... 3 1.1 Project Mid-term Adjustment Introduction ......................................................... 3 1.2 EMP Adjustment Basis ......................................................................................... 5 1.2.1 Relevant Laws and Regulations ................................................................ 5 1.2.2 Regulations of Departments and Local Government ................................ 7 1.2.3 Main Technical Specifications .................................................................. 8 1.2.4 Main Environmental Standards ............................................................... 10 1.2.5 Other Materials ........................................................................................ 12 1.3 Environment Impact Scope Variation Status After Project Mid-term Adjustment .......................................................................................................................................... 13 1.3.1 Hanchuan Sewage Collection Pipeline Network Project ....................... -

Resource Curse” of the Cultivated Land in Main Agricultural Production Regions: a Case Study of Jianghan Plain, Central China
International Journal of Environmental Research and Public Health Article Spatio-Temporal Differentiation and Driving Mechanism of the “Resource Curse” of the Cultivated Land in Main Agricultural Production Regions: A Case Study of Jianghan Plain, Central China Yuanyuan Zhu, Xiaoqi Zhou , Yilin Gan, Jing Chen and Ruilin Yu * Key Laboratory for Geographical Process Analysis & Simulation Hubei Province, Central China Normal University, Wuhan 430079, China; [email protected] (Y.Z.); [email protected] (X.Z.); [email protected] (Y.G.); [email protected] (J.C.) * Correspondence: [email protected]; Tel.: +86-189-8622-9015 Abstract: Cultivated land resources are an important component of natural resources and significant in stabilizing economic and social order and ensuring national food security. Although the research on resource curse has progressed considerably, only a few studies have explored the existence and influencing factors of the resource curse of non-traditional mineral resources. The current study introduced resource curse theory to the cultivated land resources research and directly investigated the county-level relationship between cultivated land resource abundance and economic develop- ment. Meanwhile, the spatiotemporal dynamic pattern and driving factors of the cultivated land curse were evaluated on the cultivated land curse coefficient in China’s Jianghan Plain from 2001 to 2017. The results indicated that the curse coefficient of cultivated land resources in Jianghan Citation: Zhu, Y.; Zhou, X.; Gan, Y.; Plain generally shows a downward trend. That is, the curse phenomenon of the cultivated land Chen, J.; Yu, R. Spatio-Temporal resources in large regions did not improve significantly in 2001–2017. -

Filmtec Fortilife Elements: Strongly Support FGD Wastewater ZLD
Tech Fact DOW FILMTEC™ membranes FILMTEC FORTILIFETM elements – Strongly support FGD wastewater ZLD & crystal salt reclamation project of Guodian Hanchuan power plant Project information: China Guodian power group is one of the five largest power groups in China. Guodian Hanchuan power Location: plant has operated since 1987 on the bank of Han river in central China. Through three phases of Hubei Province, China engineering construction, Guodian Hanchuan power plants now owns 6 coal fired power units, 4 with 300 Purpose: MW capacity and 2 with 1000 MW capacity for a total of 3200 MW installation capacity. FGD wastewater ZLD of power industry Beijing Lucency enviro-tech Co. Ltd, Nanjing branch (Simplified as Nanjing Lucency in the following parts) Performance: is a subsidiary of Guodian Technology & Environment Corporation. Nanjing Lucency has investigation & Successfully support FGD wastewater ZLD and crystal engineering design, construction, and operation capability in the water treatment technology as well as its salt reclamation extended value chain. To date, Nanjing Lucency has completed more than 200 projects in the power plant supply water treatment and industrial wastewater treatment. Figure. The bird view of Guodian Hanchuan power plant (Photo provided by Beijing Lucency enviro-tech Co. Ltd, Nanjing branch) Background Coal is one of the most important energy resource in China’s energy security strategy. The coal-fired information power plants provide more than 60% of the power supply in China. However, the sustainable use of coal- fired power plants has caught the attention of environmental protection agencies and regulations are being put into place to protect the air and water resources. -

G. Aijmer a Structural Approach to Chinese Ancestor Worship In
G. Aijmer A structural approach to Chinese ancestor worship In: Bijdragen tot de Taal-, Land- en Volkenkunde 124 (1968), no: 1, Leiden, 91-98 This PDF-file was downloaded from http://www.kitlv-journals.nl Downloaded from Brill.com09/26/2021 10:42:46AM via free access A STRUCTURAL APPROACH TO CHINESE ANCESTOR WORSHIP ^^^tudents of traditional Chinese society have for ages devoted V § much printed space to ancestor worship. The following notes are an attempt to approach the subject matter in terms of structural models. The ideas presented are vague and tentative. I am aware that they challenge traditional sinology and history of religion, but at the same time I feel that social anthropologists interested in this part of the world may have something to say on this topic. Indeed, social anthropologists have frequently been attracted by Chinese ancestor worship. It is nat within the scope of these notes to give an account of these attempts. However, the recent discussion by Professor Maurice Freedman, the chapter 'Geomancy and Ancestor Worship in his Chinese Lineage and Society (1966), is an outstanding contribution to our knowledge of ancestor ceremonialism. Freedman makes a clear distinction between the worship of the physical remains of the dead and the worship of the symbol of his person in the form of a wooden tablet. * I wish to thank Professor Maurice Freedman, London, Mr. Robert G. Groves, Norwich, and my wife for valuable comments. The material from the central Yangzi valley is from gazetteers quoted in the encyclopaedia Gujin tushu jicheng. References can be found on the following loei as follows, according to the system of Giles 1911. -

Risen from Chaos: the Development of Modern Education in China, 1905-1948
The London School of Economics and Political Science Risen from Chaos: the development of modern education in China, 1905-1948 Pei Gao A thesis submitted to the Department of Economic History of the London School of Economics for the degree of Doctor of Philosophy London, March 2015 Declaration I certify that the thesis I have presented for examination for the MPhil/PhD degree of the London School of Economics and Political Science is solely my own work other than where I have clearly indicated that it is the work of others (in which case the extent of any work carried out jointly by me and any other person is clearly identified in it). The copyright of this thesis rests with the author. Quotation from it is permitted, provided that full acknowledgement is made. This thesis may not be reproduced without my prior written consent. I warrant that this authorisation does not, to the best of my belief, infringe the rights of any third party. I declare that my thesis consists of 72182 words. I can confirm that my thesis was copy edited for conventions of language, spelling and grammar by Eve Richard. Abstract My PhD thesis studies the rise of modern education in China and its underlying driving forces from the turn of the 20th century. It is motivated by one sweeping educational movement in Chinese history: the traditional Confucius teaching came to an abrupt end, and was replaced by a modern and national education model at the turn of the 20th century. This thesis provides the first systematic quantitative studies that examine the rise of education through the initial stage of its development. -

CLR Review Independent Evaluation Group
CLR Review Independent Evaluation Group 1. CAS/CPS Data Country: China CAS/CPS Year: FY13 CAS/CPS Period: FY13 – FY17 CLR Period: FY13 – FY17 Date of this review: November 20, 2019 2. Ratings CLR Rating IEG Rating Development Outcome: Satisfactory Satisfactory WBG Performance: Good Good 3. Executive Summary i. This review of the World Bank Group’s (WBG) Completion and Learning Review (CLR) covers the period of the Country Partnership Strategy (CPS), FY13-17, as updated in the Performance and Learning Review (PLR) dated January 6, 2015. The PLR extended the CPS period by six months to the end of calendar year 2016. ii. China, with a population of 1.4 billion, is an upper middle- income country with a GNI per capita of $8,690 in 2017. During 2013-2017, the economy grew annually at 7.1 percent on average, slower than the previous CPS period of 11.0 percent. A long period of economic growth put pressure on the environment and raised serious sustainability challenges. China is now contributing around 30 percent to the world’s GHG emissions, partly because it is the largest consumer of carbon for electricity. Significant gains in poverty reduction continued during the CPS period. Absolute poverty, measured at $1.90 per day (2011 PPP), dropped from 1.9 percent in 2013 to 0.5 percent in 2018. Poverty and vulnerability in China are concentrated in rural areas and lagging regions in Central and Western China. The welfare of the bottom 40 percent of the income distribution has increased steadily. The Gini coefficient dropped to .46 in 2015 after having risen to a high of .5 in 2008. -

Research on Urban Network of Wuhan Metropolitan Area in China Based on Social Network Analysis
International Journal of Culture and History, Vol. 3, No. 1, March 2017 Research on Urban Network of Wuhan Metropolitan Area in China Based on Social Network Analysis Jing-Xin Nie, Ya-Ping Huang, and Pei Chen according to enterprise organizations [22], [23]. Abstract—This article is based on the retrospect of theoretical The essence of urban network is intercity relation, and way and analysis method of town correlation measure, relational data is always applied in urban network research. summarized the advantages and disadvantages. Then the article With the rapid development of information and proposed the social network analysis method with network data of express, in order to analyze the town correlation measure. communication technology, distance of space and time Taking Wuhan metropolitan area in china as practical between cities is greatly compressed, and the connections experiment objects, and found out the network characteristics of between cities are more and more closely. Excavating it, which dominance and polarization coexisted, axes and relational data has become a new trend in research of urban corridors gathered in space. In the view of social network, the network. Social Network Analysis, SNA for short, is a urban system of Wuhan metropolitan area has not been methodology which describes the whole form, characteristics completed, though the inner core group has formed, but the connection between the low-level nodes is not strong enough. and structure of network. SNA has obvious advantage in relation expression; a network can be regarded either as a Index Terms—Express network, social network analysis, whole or a part, so that reveals the integration and hierarchy of Wuhan metropolitan area, urban network. -
Minimum Wage Standards in China August 11, 2020
Minimum Wage Standards in China August 11, 2020 Contents Heilongjiang ................................................................................................................................................. 3 Jilin ............................................................................................................................................................... 3 Liaoning ........................................................................................................................................................ 4 Inner Mongolia Autonomous Region ........................................................................................................... 7 Beijing......................................................................................................................................................... 10 Hebei ........................................................................................................................................................... 11 Henan .......................................................................................................................................................... 13 Shandong .................................................................................................................................................... 14 Shanxi ......................................................................................................................................................... 16 Shaanxi ...................................................................................................................................................... -

Study on the Spatial Characteristics of Network Public Opinion and Social Governance Measures Under Public Health Emergencies
Liu, Ch. Study on the spatial characteristics of network public opinion and social governance measures under public health emergencies Research Paper Study on the spatial characteristics of network public opinion and social governance measures under public health emergencies ——Take Wuhan metropolitan as an example Chang LIU, Huazhong University of Science & Technology, China Abstract With the development of economic globalization and social informatization, network public opinion, as a new urban environment, poses new challenges to the global cities in response to the outbreak of infectious diseases such as COVID-19, H1N1, SARS, and puts forward higher requirements for the ability of government departments to deal with public health emergencies. Network public opinion is an important embodiment of public will and the correct guidance and supervision of it will help urban managers to ease public sentiment and reduce social conflicts. Wuhan metropolitan, as a severe disaster area of COVID-19, is a typical network public opinion concentration area. This paper extracts the geographical entity nouns within the scope of Wuhan metropolitan and analyzes the word frequency and emotion, based on the public opinion text data of mainstream social network platforms in China during the six months after the outbreak of the epidemic. The results show that the areas with high word frequency form multiple agglomeration centers along the edge of Wuhan Central City; the spatial distribution of positive and negative orientation of emotion in Wuhan metropolitan is unbalanced, and the difference between cities is significant; the correlation between word frequency and emotional orientation forms five typical regions in space. Based on this, this paper focuses on the areas where the word frequency is high and the emotional orientation is negative.