The Instrument Suite and Mission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Volcanic History of the Imbrium Basin: a Close-Up View from the Lunar Rover Yutu
Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu Jinhai Zhanga, Wei Yanga, Sen Hua, Yangting Lina,1, Guangyou Fangb, Chunlai Lic, Wenxi Pengd, Sanyuan Zhue, Zhiping Hef, Bin Zhoub, Hongyu Ling, Jianfeng Yangh, Enhai Liui, Yuchen Xua, Jianyu Wangf, Zhenxing Yaoa, Yongliao Zouc, Jun Yanc, and Ziyuan Ouyangj aKey Laboratory of Earth and Planetary Physics, Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China; bInstitute of Electronics, Chinese Academy of Sciences, Beijing 100190, China; cNational Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China; dInstitute of High Energy Physics, Chinese Academy of Sciences, Beijing 100049, China; eKey Laboratory of Mineralogy and Metallogeny, Guangzhou Institute of Geochemistry, Chinese Academy of Sciences, Guangzhou 510640, China; fKey Laboratory of Space Active Opto-Electronics Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China; gThe Fifth Laboratory, Beijing Institute of Space Mechanics & Electricity, Beijing 100076, China; hXi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences, Xi’an 710119, China; iInstitute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China; and jInstitute of Geochemistry, Chinese Academy of Science, Guiyang 550002, China Edited by Mark H. Thiemens, University of California, San Diego, La Jolla, CA, and approved March 24, 2015 (received for review February 13, 2015) We report the surface exploration by the lunar rover Yutu that flows in Mare Imbrium was obtained only by remote sensing from landed on the young lava flow in the northeastern part of the orbit. On December 14, 2013, Chang’e-3 successfully landed on the Mare Imbrium, which is the largest basin on the nearside of the young and high-Ti lava flow in the northeastern Mare Imbrium, Moon and is filled with several basalt units estimated to date from about 10 km south from the old low-Ti basalt unit (Fig. -

A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B
A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B. L. Redding U. S. Geological Survey, 2255 N. Gemini Drive, Flagstaff, AZ 86001, USA, [email protected] Introduction: We have completed a new general unified lunar control network and lunar topographic model based on Clementine images. This photogrammetric network solution is the largest planetary control network ever completed. It includes the determination of the 3-D positions of 272,931 points on the lunar surface and the correction of the camera angles for 43,866 Clementine images, using 546,126 tie point measurements. The solution RMS is 20 µm (= 0.9 pixels) in the image plane, with the largest residual of 6.4 pixels. We are now documenting our solution [1] and plan to release the solution results soon [2]. Previous Networks: In recent years there have been two generally accepted lunar control networks. These are the Unified Lunar Control Network (ULCN) and the Clementine Lunar Control Network (CLCN), both derived by M. Davies and T. Colvin at RAND. The original ULCN was described in the last major publication about a lunar control network [3]. Images for this network are from the Apollo, Mariner 10, and Galileo missions, and Earth-based photographs. The CLCN was derived from Clementine images and measurements on Clementine 750-nm images. The purpose of this network was to determine the geometry for the Clementine Base Map [4]. The geometry of that mosaic was used to produce the Clementine UVVIS digital image model [5] and the Near-Infrared Global Multispectral Map of the Moon from Clementine [6]. -

Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements
Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements by Brent Archinal USGS Astrogeology Team 2255 N. Gemini Drive Flagstaff, AZ 86001 [email protected] As of 2004 December 9 Version 1.0 Table of Contents 1. Introduction 1.1. General 1.2. Conventions 2. Observations Equations and Their Partials 2.1. Line Scanner Camera Specific Modeling 2.2. Partials for New Parameters 2.2.1. Orientation Partials 2.2.2. Spatial Partials 2.2.3. Partials of the observations with respect to the parameters 2.2.4. Parameter Weighting 3. Adjustment Model 4. Implementation 4.1. Input/Output Changes 4.1.1. Image Measurements 4.1.2. SPICE Data 4.1.3. Program Control (Parameters) Information 4.2. Computational Changes 4.2.1. Generation of A priori Information 4.2.2. Partial derivatives 4.2.3. Solution Output 5. Testing and Near Term Work 6. Future Work Acknowledgements References Useful web sites Appendix I - Partial Transcription of Colvin (1992) Documentation Appendix II - HiRISE Sensor Model Information 1. Introduction 1.1 General The overall problem we’re solving is that we want to be able to set up the relationships between the coordinates of arbitrary physical points in space (e.g. ground points) and their coordinates on line scanner (or “pushbroom”) camera images. We then want to do a least squares solution in order to come up with consistent camera orientation and position information that represents these relationships accurately. For now, supported by funding from the NASA Critical Data Products initiative (for 2003 September to 2005 August), we will concentrate on handling the THEMIS IR camera system (Christensen et al., 2003). -

Elliptical Instability in Terrestrial Planets and Moons
A&A 539, A78 (2012) Astronomy DOI: 10.1051/0004-6361/201117741 & c ESO 2012 Astrophysics Elliptical instability in terrestrial planets and moons D. Cebron1,M.LeBars1, C. Moutou2,andP.LeGal1 1 Institut de Recherche sur les Phénomènes Hors Equilibre, UMR 6594, CNRS and Aix-Marseille Université, 49 rue F. Joliot-Curie, BP 146, 13384 Marseille Cedex 13, France e-mail: [email protected] 2 Observatoire Astronomique de Marseille-Provence, Laboratoire d’Astrophysique de Marseille, 38 rue F. Joliot-Curie, 13388 Marseille Cedex 13, France Received 21 July 2011 / Accepted 16 January 2012 ABSTRACT Context. The presence of celestial companions means that any planet may be subject to three kinds of harmonic mechanical forcing: tides, precession/nutation, and libration. These forcings can generate flows in internal fluid layers, such as fluid cores and subsurface oceans, whose dynamics then significantly differ from solid body rotation. In particular, tides in non-synchronized bodies and libration in synchronized ones are known to be capable of exciting the so-called elliptical instability, i.e. a generic instability corresponding to the destabilization of two-dimensional flows with elliptical streamlines, leading to three-dimensional turbulence. Aims. We aim here at confirming the relevance of such an elliptical instability in terrestrial bodies by determining its growth rate, as well as its consequences on energy dissipation, on magnetic field induction, and on heat flux fluctuations on planetary scales. Methods. Previous studies and theoretical results for the elliptical instability are re-evaluated and extended to cope with an astro- physical context. In particular, generic analytical expressions of the elliptical instability growth rate are obtained using a local WKB approach, simultaneously considering for the first time (i) a local temperature gradient due to an imposed temperature contrast across the considered layer or to the presence of a volumic heat source and (ii) an imposed magnetic field along the rotation axis, coming from an external source. -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

An Advanced Scattered Moonlight Model for Cerro Paranal? A
Astronomy & Astrophysics manuscript no. moon c ESO 2018 October 15, 2018 An advanced scattered moonlight model for Cerro Paranal? A. Jones1, S. Noll1, W. Kausch1, C. Szyszka1, and S. Kimeswenger2; 1 1 Institute for Astro and Particle Physics, Leopold Franzens Universität Innsbruck, Technikerstrasse 25, 6020 Innsbruck, Austria e-mail: [email protected] 2 Instituto de Astronomía, Universidad Católica del Norte, Avenida Angamos 0610, Antofagasta, Chile Accepted for publication in A&A October 2013 ABSTRACT The largest natural source of light at night is the Moon, and it is the major contributor to the astronomical sky background. Being able to accurately predict the sky background, including scattered moonlight is important for scheduling astronomical observations. We have developed an improved scattered moonlight model, in which the components are computed with a better physical understanding as opposed to the simple empirical fit in the frequently used photometric model of Krisciunas & Schaefer (1991). Our spectroscopic model can better trace the spectral trends of scattered moonlight for any position of the Moon and target observation. This is the first scattered moonlight model that we know of which is this physical and versatile. We have incorporated an observed solar spectrum, accurate lunar albedo fit, and elaborate scattering and absorption calculations that include scattering off of molecules and aerosols. It was designed for Cerro Paranal, but can be modified for any location with known atmospheric properties. Throughout the optical range, the uncertainty is less than 20%. This advanced scattered moonlight model can predict the amount of scattered moonlight for any given geometry of the Moon and target, and lunar phase for the entire optical spectrum. -

LUNAR REGOLITH PROPERTIES CONSTRAINED by LRO DIVINER and CHANG'e 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 3176.pdf LUNAR REGOLITH PROPERTIES CONSTRAINED BY LRO DIVINER AND CHANG’E 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O. Hayne2, D. T. Blewett3, 1Planetary Sci- ence Institute (1700 East Fort Lowell, Suite 106 Tucson, AZ 85719-2395, [email protected]), 2University of Colorado, Boulder. 3Johns Hopkins Univ. Applied Physics Lab, Maryland. Introduction: The geophysical properties of the sults of the thermal model (which includes layer num- lunar regolith have been well-studied, but many uncer- bers, layer thickness, temperature profile and density tainties remain about their in-situ nature. Diviner Lunar profile) are input parameters for the microwave model. Radiometer Experiment onboard LRO [1] is an instru- In contrast to [2, 3], we update the thermal parame- ment measuring the surface bolometric temperature of ters to match the surface temperature at noon in the the regolith. It has been systematically mapping the equatorial region and diurnal temperature variation in Moon since July 5, 2009 at solar and infrared wave- high latitude (Fig. 1). The best fit of the data show that lengths covering a full range of latitudes, longitudes, for most highlands the regolith has a bond albedo of local times and seasons. The Microwave Radiometer 0.09 at normal solar incidence and bond albedo at arbi- (MRM) carried by Chang’e 2 (CE-2) was used to de- trary solar incidence θ is represented by A=0.09 rive the brightness temperature of the moon in frequen- +0.04×(4θ/π)3+0.05×(2θ/π)8. -
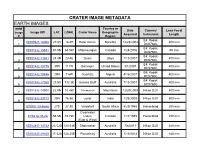
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual -

Impact Craters) Into the Subsurface
SUBSURFACE MINERAL HETEROGENEITY IN THE MARTIAN CRUST AS SEEN BY THE THERMAL EMISSION IMAGING SYSTEM (THEMIS): VIEWS FROM NATURAL “WINDOWS” (IMPACT CRATERS) INTO THE SUBSURFACE. L. L. Tornabene1 , J. E. Moersch1, H. Y. McSween Jr.1, J. A. Piatek1 and P. R. Christensen2; 1Department of Earth and Planetary Sciences, University of Tennessee, Knoxville, Tennessee 37996-1410, 2 Department of Geological Sciences, Arizona State University, Tempe, Arizona 85287–6305, USA. Introduction and Background: Impact craters have been effectively used as a “natural drill” into the crust of the moon, the Earth and on Mars, giving us a glimpse of the mineral and lithologic compositions that are otherwise not exposed or present on surfaces. A lunar study by Tomp- kins and Pieters [1] has demonstrated that Lunar Clementine data could be used to show that numerous craters on the Moon excavated distinct compositions within both the cen- tral uplift and craters walls/terraces of several complex cra- ters with respect to the surrounding lunar surface composi- tion. Later, Tornabene et al [2] demonstrated how Haughton impact structure was an excellent terrestrial analog for dem- onstrating the utility of using craters for studying both near- subsurface and the shallow crust of Mars. Using ASTER Thermal infrared (TIR) data, as an analog for THEMIS TIR, three subsurface units were distinguished within the structure as units that were excavated and uplifted by the impact event. These units, if not for the regional tilt and erosion, would otherwise not be presently exposed if not for the Haughton event. Meanwhile, recent studies on Mars by the Opportunity rover [3] revealed our first clear view of out- cropping bedrock of sedimentary layers within the walls of Eagle and Endurance craters. -

Lunar Cold Spots and Crater Production on the Moon 10.1029/2018JE005652 J.-P
Journal of Geophysical Research: Planets RESEARCH ARTICLE Lunar Cold Spots and Crater Production on the Moon 10.1029/2018JE005652 J.-P. Williams1 , J. L. Bandfield2 , D. A. Paige1, T. M. Powell1, B. T. Greenhagen3, S. Taylor1, 4 5 6 7,8 Key Points: P. O. Hayne , E. J. Speyerer , R. R. Ghent , and E. S. Costello • We measure diameters of craters 1 2 associated with cold spots. Their Earth, Planetary, and Space Sciences, University of California, Los Angeles, CA, USA, Space Science Institute, Boulder, CO, USA, size-frequency distribution indicates 3Applied Physics Laboratory, Johns Hopkins University, Laurel, MD, USA, 4Department of Astrophysical & Planetary Sciences, cold spots survive a few hundred kyr University of Colorado, Boulder, Boulder, CO, USA, 5School of Earth and Space Exploration, Arizona State University, Tempe, AZ, • fl The distribution of cold spots re ects USA, 6Earth Sciences, University of Toronto, Toronto, ON, Canada, 7Department of Geology and Geophysics, University of ’ the Moon s synchronous rotation ’ ā 8 with cold spots focused on the apex Hawai iatM noa, Honolulu, HI, USA, Hawaii Institute of Geophysics and Planetology, Honolulu, HI, USA of motion • The largest cold spots with source craters larger than 800 m are Abstract Mapping of lunar nighttime surface temperatures has revealed anomalously low nighttime concentrated on the trailing side of temperatures around recently formed impact craters on the Moon. The thermophysically distinct “cold the moon spots” provide a way of identifying the most recently formed impact craters. Over 2,000 cold spot source craters were measured with diameters ranging from 43 m to 2.3 km. -

The Primordial Nucleus of Comet 67P/Churyumov-Gerasimenko B
A&A 592, A63 (2016) Astronomy DOI: 10.1051/0004-6361/201526968 & c ESO 2016 Astrophysics The primordial nucleus of comet 67P/Churyumov-Gerasimenko B. J. R. Davidsson1; 2, H. Sierks3, C. Güttler3, F. Marzari4, M. Pajola5, H. Rickman1; 6, M. F. A’Hearn7; 8, A.-T. Auger9, M. R. El-Maarry10, S. Fornasier11, P. J. Gutiérrez12, H. U. Keller13, M. Massironi5; 14, C. Snodgrass15, J.-B. Vincent3, C. Barbieri16, P. L. Lamy17, R. Rodrigo18; 19, D. Koschny20, M. A. Barucci11, J.-L. Bertaux21, I. Bertini5, G. Cremonese22, V. Da Deppo23, S. Debei24, M. De Cecco25, C. Feller11; 26, M. Fulle27, O. Groussin9, S. F. Hviid28, S. Höfner3, W.-H. Ip29, L. Jorda17, J. Knollenberg28, G. Kovacs3, J.-R. Kramm3, E. Kührt28, M. Küppers30, F. La Forgia16, L. M. Lara12, M. Lazzarin16, J. J. Lopez Moreno12, R. Moissl-Fraund30, S. Mottola28, G. Naletto31, N. Oklay3, N. Thomas10, and C. Tubiana3 (Affiliations can be found after the references) Received 15 July 2015 / Accepted 15 March 2016 ABSTRACT Context. We investigate the formation and evolution of comet nuclei and other trans-Neptunian objects (TNOs) in the solar nebula and primordial disk prior to the giant planet orbit instability foreseen by the Nice model. Aims. Our goal is to determine whether most observed comet nuclei are primordial rubble-pile survivors that formed in the solar nebula and young primordial disk or collisional rubble piles formed later in the aftermath of catastrophic disruptions of larger parent bodies. We also propose a concurrent comet and TNO formation scenario that is consistent with observations. Methods. We used observations of comet 67P/Churyumov-Gerasimenko by the ESA Rosetta spacecraft, particularly by the OSIRIS camera system, combined with data from the NASA Stardust sample-return mission to comet 81P/Wild 2 and from meteoritics; we also used existing observations from ground or from spacecraft of irregular satellites of the giant planets, Centaurs, and TNOs. -

Science Concept 3: Key Planetary
Science Concept 6: The Moon is an Accessible Laboratory for Studying the Impact Process on Planetary Scales Science Concept 6: The Moon is an accessible laboratory for studying the impact process on planetary scales Science Goals: a. Characterize the existence and extent of melt sheet differentiation. b. Determine the structure of multi-ring impact basins. c. Quantify the effects of planetary characteristics (composition, density, impact velocities) on crater formation and morphology. d. Measure the extent of lateral and vertical mixing of local and ejecta material. INTRODUCTION Impact cratering is a fundamental geological process which is ubiquitous throughout the Solar System. Impacts have been linked with the formation of bodies (e.g. the Moon; Hartmann and Davis, 1975), terrestrial mass extinctions (e.g. the Cretaceous-Tertiary boundary extinction; Alvarez et al., 1980), and even proposed as a transfer mechanism for life between planetary bodies (Chyba et al., 1994). However, the importance of impacts and impact cratering has only been realized within the last 50 or so years. Here we briefly introduce the topic of impact cratering. The main crater types and their features are outlined as well as their formation mechanisms. Scaling laws, which attempt to link impacts at a variety of scales, are also introduced. Finally, we note the lack of extraterrestrial crater samples and how Science Concept 6 addresses this. Crater Types There are three distinct crater types: simple craters, complex craters, and multi-ring basins (Fig. 6.1). The type of crater produced in an impact is dependent upon the size, density, and speed of the impactor, as well as the strength and gravitational field of the target.