Digital Elevation Models of the Lunar Surface from Chandrayaan-2 Terrain Mapping Camera-2 (TMC-2) Imagery – Initial Results
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Volcanic History of the Imbrium Basin: a Close-Up View from the Lunar Rover Yutu
Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu Jinhai Zhanga, Wei Yanga, Sen Hua, Yangting Lina,1, Guangyou Fangb, Chunlai Lic, Wenxi Pengd, Sanyuan Zhue, Zhiping Hef, Bin Zhoub, Hongyu Ling, Jianfeng Yangh, Enhai Liui, Yuchen Xua, Jianyu Wangf, Zhenxing Yaoa, Yongliao Zouc, Jun Yanc, and Ziyuan Ouyangj aKey Laboratory of Earth and Planetary Physics, Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China; bInstitute of Electronics, Chinese Academy of Sciences, Beijing 100190, China; cNational Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China; dInstitute of High Energy Physics, Chinese Academy of Sciences, Beijing 100049, China; eKey Laboratory of Mineralogy and Metallogeny, Guangzhou Institute of Geochemistry, Chinese Academy of Sciences, Guangzhou 510640, China; fKey Laboratory of Space Active Opto-Electronics Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China; gThe Fifth Laboratory, Beijing Institute of Space Mechanics & Electricity, Beijing 100076, China; hXi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences, Xi’an 710119, China; iInstitute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China; and jInstitute of Geochemistry, Chinese Academy of Science, Guiyang 550002, China Edited by Mark H. Thiemens, University of California, San Diego, La Jolla, CA, and approved March 24, 2015 (received for review February 13, 2015) We report the surface exploration by the lunar rover Yutu that flows in Mare Imbrium was obtained only by remote sensing from landed on the young lava flow in the northeastern part of the orbit. On December 14, 2013, Chang’e-3 successfully landed on the Mare Imbrium, which is the largest basin on the nearside of the young and high-Ti lava flow in the northeastern Mare Imbrium, Moon and is filled with several basalt units estimated to date from about 10 km south from the old low-Ti basalt unit (Fig. -

A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B
A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B. L. Redding U. S. Geological Survey, 2255 N. Gemini Drive, Flagstaff, AZ 86001, USA, [email protected] Introduction: We have completed a new general unified lunar control network and lunar topographic model based on Clementine images. This photogrammetric network solution is the largest planetary control network ever completed. It includes the determination of the 3-D positions of 272,931 points on the lunar surface and the correction of the camera angles for 43,866 Clementine images, using 546,126 tie point measurements. The solution RMS is 20 µm (= 0.9 pixels) in the image plane, with the largest residual of 6.4 pixels. We are now documenting our solution [1] and plan to release the solution results soon [2]. Previous Networks: In recent years there have been two generally accepted lunar control networks. These are the Unified Lunar Control Network (ULCN) and the Clementine Lunar Control Network (CLCN), both derived by M. Davies and T. Colvin at RAND. The original ULCN was described in the last major publication about a lunar control network [3]. Images for this network are from the Apollo, Mariner 10, and Galileo missions, and Earth-based photographs. The CLCN was derived from Clementine images and measurements on Clementine 750-nm images. The purpose of this network was to determine the geometry for the Clementine Base Map [4]. The geometry of that mosaic was used to produce the Clementine UVVIS digital image model [5] and the Near-Infrared Global Multispectral Map of the Moon from Clementine [6]. -

Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements
Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements by Brent Archinal USGS Astrogeology Team 2255 N. Gemini Drive Flagstaff, AZ 86001 [email protected] As of 2004 December 9 Version 1.0 Table of Contents 1. Introduction 1.1. General 1.2. Conventions 2. Observations Equations and Their Partials 2.1. Line Scanner Camera Specific Modeling 2.2. Partials for New Parameters 2.2.1. Orientation Partials 2.2.2. Spatial Partials 2.2.3. Partials of the observations with respect to the parameters 2.2.4. Parameter Weighting 3. Adjustment Model 4. Implementation 4.1. Input/Output Changes 4.1.1. Image Measurements 4.1.2. SPICE Data 4.1.3. Program Control (Parameters) Information 4.2. Computational Changes 4.2.1. Generation of A priori Information 4.2.2. Partial derivatives 4.2.3. Solution Output 5. Testing and Near Term Work 6. Future Work Acknowledgements References Useful web sites Appendix I - Partial Transcription of Colvin (1992) Documentation Appendix II - HiRISE Sensor Model Information 1. Introduction 1.1 General The overall problem we’re solving is that we want to be able to set up the relationships between the coordinates of arbitrary physical points in space (e.g. ground points) and their coordinates on line scanner (or “pushbroom”) camera images. We then want to do a least squares solution in order to come up with consistent camera orientation and position information that represents these relationships accurately. For now, supported by funding from the NASA Critical Data Products initiative (for 2003 September to 2005 August), we will concentrate on handling the THEMIS IR camera system (Christensen et al., 2003). -

Hirise Digital Elevation Model of Phobos: Implications for Morphological Analysis of Grooves
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 1759.pdf HIRISE DIGITAL ELEVATION MODEL OF PHOBOS: IMPLICATIONS FOR MORPHOLOGICAL ANALYSIS OF GROOVES. R. Hemmi1 and H. Miyamoto2, 1The University Museum, The University of Tokyo (7-3-1 Hongo, Bunkyo-ku, Tokyo, 113-0033, Japan, [email protected]), 2Depatment of Systems Inno- vation, School of Engineering, The University of Tokyo Introduction: Linear narrow depressions common- ly known as “grooves,” can be observed on a variety of small bodies including Phobos, Gaspra, Ida, Eros, and small saturnian satellites [1]. Characteristics of grooves may reflect geological events, inherent in individual bodies. The surface of Phobos is mostly covered by grooves many of which are less than ~1 km wide. It remains controversial whether their morphologies rep- resent past internal (e.g., tidal disruption [2]) or exter- nal processes (e.g., crater chains [3,4], rolling boulders [5], etc.). The presence of raised rims on grooves is an important diagnostic of impact cratering processes as opposed to extensional stress which would form rim- less depressions [6]. Groove rims were previously identified from images [6–8]; however, their detailed topographies have not been well investigated. This is primarily due to limited spatial resolutions of previous digital terrain models (up to 100 meters) which are similar to the widths of target features (a few hundreds Fig. 1. HiRISE stereo pair images of Phobos (upper of meters). In this study, we produce a digital elevation images) and a part of HRSC global orthomosaic (lower model (DEM) from Mars Reconnaissance Orbiter’s image) with ground control points (magenta crosses). -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

LUNAR REGOLITH PROPERTIES CONSTRAINED by LRO DIVINER and CHANG'e 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 3176.pdf LUNAR REGOLITH PROPERTIES CONSTRAINED BY LRO DIVINER AND CHANG’E 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O. Hayne2, D. T. Blewett3, 1Planetary Sci- ence Institute (1700 East Fort Lowell, Suite 106 Tucson, AZ 85719-2395, [email protected]), 2University of Colorado, Boulder. 3Johns Hopkins Univ. Applied Physics Lab, Maryland. Introduction: The geophysical properties of the sults of the thermal model (which includes layer num- lunar regolith have been well-studied, but many uncer- bers, layer thickness, temperature profile and density tainties remain about their in-situ nature. Diviner Lunar profile) are input parameters for the microwave model. Radiometer Experiment onboard LRO [1] is an instru- In contrast to [2, 3], we update the thermal parame- ment measuring the surface bolometric temperature of ters to match the surface temperature at noon in the the regolith. It has been systematically mapping the equatorial region and diurnal temperature variation in Moon since July 5, 2009 at solar and infrared wave- high latitude (Fig. 1). The best fit of the data show that lengths covering a full range of latitudes, longitudes, for most highlands the regolith has a bond albedo of local times and seasons. The Microwave Radiometer 0.09 at normal solar incidence and bond albedo at arbi- (MRM) carried by Chang’e 2 (CE-2) was used to de- trary solar incidence θ is represented by A=0.09 rive the brightness temperature of the moon in frequen- +0.04×(4θ/π)3+0.05×(2θ/π)8. -

Parameters Derived from And/Or Used with Digital Elevation Models (Dems) for Landslide Susceptibility Mapping and Landslide Risk Assessment: a Review
International Journal of Geo-Information Review Parameters Derived from and/or Used with Digital Elevation Models (DEMs) for Landslide Susceptibility Mapping and Landslide Risk Assessment: A Review Nayyer Saleem * , Md. Enamul Huq , Nana Yaw Danquah Twumasi, Akib Javed and Asif Sajjad State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China; [email protected] (M.E.H.); [email protected] (N.Y.D.T.); [email protected] (A.J.); [email protected] (A.S.) * Correspondence: [email protected]; Tel.: +86-131-6411-7422 Received: 15 September 2019; Accepted: 27 November 2019; Published: 29 November 2019 Abstract: Digital elevation models (DEMs) are considered an imperative tool for many 3D visualization applications; however, for applications related to topography, they are exploited mostly as a basic source of information. In the study of landslide susceptibility mapping, parameters or landslide conditioning factors are deduced from the information related to DEMs, especially elevation. In this paper conditioning factors related with topography are analyzed and the impact of resolution and accuracy of DEMs on these factors is discussed. Previously conducted research on landslide susceptibility mapping using these factors or parameters through exploiting different methods or models in the last two decades is reviewed, and modern trends in this field are presented in a tabulated form. Two factors or parameters are proposed for inclusion in landslide inventory list as a conditioning factor and a risk assessment parameter for future studies. Keywords: digital elevation models (DEMs); landslide hazards; landslide susceptibility mapping; landslide conditioning factors; landslide risk assessment 1. -

Comparative Analysis of Digital Elevation Models: a Case Study Around Madduleru River
Indian Journal of Geo Marine Sciences Vol. 46 (07), July 2017, pp. 1339-1351 Comparative analysis of digital elevation models: A case study around Madduleru River Subbu Lakshmi. E1 & Kiran Yarrakula2* Centre for Disaster Mitigation and Management, VIT University, Vellore, Pin 632014, India *[E-mail: [email protected]] Received 14 July 2016 ; revised 28 November 2016 High resolution DEM is generated from Cartosat-1 stereo data. The performance of different DEMs is evaluated based on error statistics. To identify the hill profiles, the TIN plots have generated and compared for SRTM, Cartosat -1, and SOI toposheet. The study divulges that, elevation values of Cartosat-1 DEM are better in flat terrain and SRTM images in hilly region produced better, when compared each other. [Keywords: Cartosat-1 DEM, SRTM-DEM, Google earth, Survey of India Toposheet, Accuracy Assessment, Digital elevation model] Introduction corresponding image points are identified in the Cartosat-1 DEM with 2.5m spatial particular stereo images In general, the accuracy resolution and vertical resolution 7.5m is intended of Cartosat-1 DEM seems to be fine in the flat to be used for generating DEM. The ground terrain which is helpful to interpret the land control points and geometric model are the features13. Past few years many scientists and essential components required for generating researchers have done a series of local and global DEM from stereo data1. DEM in variety of assessments of these elevation products. Many application such as land use land cover to analyze new technologies are giving opportunities for the spatio-temporal change on the river2&3, generating digital elevation models in remote cadastral mapping, to assess the vertical sensing to determine Earth surface elevation at characteristics of topographical variability of increasing resolution for larger areas14. -

AN ASSESSMENT of DIGITAL ELEVATION MODELS (Dems) from DIFFERENT SPATIAL DATA SOURCES
AN ASSESSMENT OF DIGITAL ELEVATION MODELS (DEMs) FROM DIFFERENT SPATIAL DATA SOURCES Olalekan Adekunle ISIOYE, Nigeria And JOBI N Paul, Nigeria Key words : Digital Elevation Model (DEM), Google Earth image, SRTM, spot height SUMMARY Digital Elevation Model (DEM) represents a very important geospatial data type in the analysis and modelling of different hydrological and ecological phenomenon which are required in preserving our immediate environment. DEMs are typically used to represent terrain relief. DEMs are particularly relevant for many applications such as lake and water volumes estimation, soil erosion volumes calculations, flood estimate, quantification of earth materials to be moved for channels, roads, dams, embankment etc. In this study, three different sources of spatial data in the generation of DEMs (Shuttle Radar Topography Mission SRTM 30, Digitized Topographical map and Google Earth Pro.) were compared with field measured data from Total Station Instrument, the field data were used to generate a Digital Elevation Models DEMs from 495 radial points over the test site. The accuracy of generated DEMs were assessed statistically by comparing (1) estimates of some topographic attributes(slope and aspect), (2)overall spot height estimation performance and, (3) independence of spot estimation errors and the magnitude of field measured height. From the results obtained it was concluded that the DEMs from the satellite imagery (SRTM 30) does not perform well in collecting data for topographic works. The digitized topographic map gives a good result but the variation from the reference in this study may be as a result of human activities and erosion that has occurred from when the topographic map was produced and also the quality of the topographic map. -
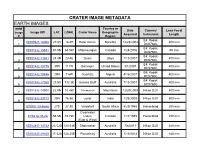
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual -

Airborne Lidar-Derived Digital Elevation Model for Archaeology
remote sensing Article Airborne LiDAR-Derived Digital Elevation Model for Archaeology Benjamin Štular 1,* , Edisa Lozi´c 1,2 and Stefan Eichert 3 1 Research Centre of the Slovenian Academy of Sciences and Arts, Novi trg 2, 1000 Ljubljana, Slovenia; [email protected] 2 Institute of Classics, University of Graz, Universitätsplatz 3/II, 8010 Graz, Austria 3 Natural History Museum Vienna, Burgring 7, 1010 Vienna, Austria; [email protected] * Correspondence: [email protected] Abstract: The use of topographic airborne LiDAR data has become an essential part of archaeological prospection, and the need for an archaeology-specific data processing workflow is well known. It is therefore surprising that little attention has been paid to the key element of processing: an archaeology-specific DEM. Accordingly, the aim of this paper is to describe an archaeology-specific DEM in detail, provide a tool for its automatic precision assessment, and determine the appropriate grid resolution. We define an archaeology-specific DEM as a subtype of DEM, which is interpolated from ground points, buildings, and four morphological types of archaeological features. We introduce a confidence map (QGIS plug-in) that assigns a confidence level to each grid cell. This is primarily used to attach a confidence level to each archaeological feature, which is useful for detecting data bias in archaeological interpretation. Confidence mapping is also an effective tool for identifying the optimal grid resolution for specific datasets. Beyond archaeological applications, the confidence map provides clear criteria for segmentation, which is one of the unsolved problems of DEM interpolation. -

Digital Elevation Models of the Moon from Earth-Based Radar Interferometry Jean-Luc Margot, Donald B
1122 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 38, NO. 2, MARCH 2000 Digital Elevation Models of the Moon from Earth-Based Radar Interferometry Jean-Luc Margot, Donald B. Campbell, Raymond F. Jurgens, Member, IEEE, and Martin A. Slade Abstract—Three-dimensional (3-D) maps of the nearside and of stereoscopic coverage. More recently, the Clementine space- polar regions of the Moon can be obtained with an Earth-based craft [7] carried a light detection and ranging (lidar) instrument, radar interferometer. This paper describes the theoretical back- which was used as an altimeter [1]. The lidar returned valid ground, experimental setup, and processing techniques for a se- quence of observations performed with the Goldstone Solar System data for latitudes between 79 S and 81 N, with an along-track Radar in 1997. These data provide radar imagery and digital ele- spacing varying between a few km and a few tens of km. The vation models of the polar areas and other small regions at IHH across track spacing was roughly 2.7 in longitude or 80 km m spatial and SH m height resolutions. A geocoding procedure at the equator. Because the instrument was somewhat sensitive relying on the elevation measurements yields cartographically ac- to detector noise and to solar background radiation, multiple re- curate products that are free of geometric distortions such as fore- shortening. turns were recorded for each laser pulse. An iterative filtering procedure selected 72 548 altimetry points for which the radial Index Terms—Interferometry, moon, radar, topography. error is estimated at 130 m [1].