Stability and Control Stick Free Characteristics Hinge Moments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glider Handbook, Chapter 2: Components and Systems
Chapter 2 Components and Systems Introduction Although gliders come in an array of shapes and sizes, the basic design features of most gliders are fundamentally the same. All gliders conform to the aerodynamic principles that make flight possible. When air flows over the wings of a glider, the wings produce a force called lift that allows the aircraft to stay aloft. Glider wings are designed to produce maximum lift with minimum drag. 2-1 Glider Design With each generation of new materials and development and improvements in aerodynamics, the performance of gliders The earlier gliders were made mainly of wood with metal has increased. One measure of performance is glide ratio. A fastenings, stays, and control cables. Subsequent designs glide ratio of 30:1 means that in smooth air a glider can travel led to a fuselage made of fabric-covered steel tubing forward 30 feet while only losing 1 foot of altitude. Glide glued to wood and fabric wings for lightness and strength. ratio is discussed further in Chapter 5, Glider Performance. New materials, such as carbon fiber, fiberglass, glass reinforced plastic (GRP), and Kevlar® are now being used Due to the critical role that aerodynamic efficiency plays in to developed stronger and lighter gliders. Modern gliders the performance of a glider, gliders often have aerodynamic are usually designed by computer-aided software to increase features seldom found in other aircraft. The wings of a modern performance. The first glider to use fiberglass extensively racing glider have a specially designed low-drag laminar flow was the Akaflieg Stuttgart FS-24 Phönix, which first flew airfoil. -

Aerosport Modeling Rudder Trim
AEROSPORT MODELING RUDDER TRIM Segment: MOBILITY PARTS PROVIDERS | Engineering companies Application vertical: MOBILITY AND TRANSPORTATION | AircraFt Application type: FINAL PART: Short runs THE CUSTOMER FINAL PART: SHORT RUNS AEROSPORT MODELING RUDDER TRIM COMPANY DESCRIPTION APPLICATION TRADITIONAL MANUFACTURING Some planes are equipped with small tabs on the control surfaces (e.g., rudder trim Assembly of 26 different machined and standard parts Aerosport Modeling & Design was established in tabs, aileron tabs, elevator tabs) so the pilot can make minute adjustments to pitch, September 1996, and since then, they have worked to yaw, and roll to keep the airplane flying a true, clean line through the air. This produce the highest-possible quality prototypes, improves speed by reducing drag from the larger, constant movements of the full appearance models, working models, and machined rudder, aileron, and elevator. parts, and to meet or exceed client expectations. The company strives to be seen as a partner to their Many airplanes also have rudder and/or aileron trim systems. On some, the rudder clients and an extension of their design and trim tab is rigid but adjustable on the ground by bending: It is angled slightly to the development team, not just a supplier of prototyping left (when viewed from behind) to lessen the need for the pilot to push the rudder services. pedal constantly in order to overcome the left-turning tendencies of many prop- driven aircraft. Some aircraft have hinged rudder trim tabs that the pilot can adjust Aerosport Products spun off from sister company in flight. Aerosport Modeling & Design in 2009 to develop products for experimental aircraft, the first of which When a servo tab is employed, it is moved into the slipstream opposite of the was the RV-10 Carbon Fiber Instrument Panel. -
Anti-Servo/Trim Tab Drive Pin Replacement
Anti-servo/trim tab drive pin replacement Classification - Mandatory Applicability All Europa aircraft (stage1 kits supplied prior to 1st December 2000) Compliance Inspection - before the next flight Incorporation - Within the next 15 flying hours Parts pro vided 1 x TP16P tab drive pin, 1 x TP16S tab drive pin In tro duc tion An incident occurred to the company demonstrator aircraft G-GBXS where one of the TP16 anti-servo/ trim tab drive pins became detached due to the plate it was welded to fracturing. The aircraft was on the ground when the failure occurred, probably during engine starting, and the resulting behaviour of the aircraft in flight was to pitch nose up. The pitch up force was containable by the pilot and a circuit and landing was successfully flown. The fracture was established to have been caused by fatigue due to repeated bending of TP16’s plate. The bending that this plate had been subjected to was likely to have been in excess of normal due to vibrations caused by an engine starting problem. The aircraft had completed 426 hours of flight which included 895 take-off and landings. It is important that the cause of unusual vibrations, for example engine starting problems or an unbalanced propeller, are resolved at the earliest opportunity. Samples of the TP16 component were taken from six aircraft which had flight times up to approximately 600 hours, and analysis revealed no cracking. However, since there has been a failure of part of the aircraft control system, it is necessary that the tab pin drive plates are replaced by a stronger design than the original. -

January 2012 Alerts
ADVISORY CIRCULAR 43-16A AVIATION MAINTENANCE ALERTS ALERT JANUARY NUMBER 2012 402 CONTENTS AIRPLANES BOMBARDIER...........................................................................................................................1 CESSNA ......................................................................................................................................4 DIAMOND ................................................................................................................................13 HELICOPTERS BELL..........................................................................................................................................15 POWERPLANTS PRATT & WHITNEY ...............................................................................................................18 ACCESSORIES AEROSEKUR FLOATS ...........................................................................................................19 KELLY ALTERNATOR...........................................................................................................19 AIR NOTES INTERNET SERVICE DIFFICULTY REPORTING (iSDR) WEB SITE...............................21 IF YOU WANT TO CONTACT US.........................................................................................22 AVIATION SERVICE DIFFICULTY REPORTS ...................................................................22 January 2012 AC 43-16A U.S. DEPARTMENT OF TRANSPORTATION FEDERAL AVIATION ADMINISTRATION WASHINGTON, DC 20590 AVIATION MAINTENANCE ALERTS The Aviation Maintenance -

09 Stability and Control
Aircraft Design Lecture 9: Stability and Control G. Dimitriadis Introduction to Aircraft Design Stability and Control H Aircraft stability deals with the ability to keep an aircraft in the air in the chosen flight attitude. H Aircraft control deals with the ability to change the flight direction and attitude of an aircraft. H Both these issues must be investigated during the preliminary design process. Introduction to Aircraft Design Design criteria? H Stability and control are not design criteria H In other words, civil aircraft are not designed specifically for stability and control H They are designed for performance. H Once a preliminary design that meets the performance criteria is created, then its stability is assessed and its control is designed. Introduction to Aircraft Design Flight Mechanics H Stability and control are collectively referred to as flight mechanics H The study of the mechanics and dynamics of flight is the means by which : – We can design an airplane to accomplish efficiently a specific task – We can make the task of the pilot easier by ensuring good handling qualities – We can avoid unwanted or unexpected phenomena that can be encountered in flight Introduction to Aircraft Design Aircraft description Flight Control Pilot System Airplane Response Task The pilot has direct control only of the Flight Control System. However, he can tailor his inputs to the FCS by observing the airplane’s response while always keeping an eye on the task at hand. Introduction to Aircraft Design Control Surfaces H Aircraft control -

Federal Register / Vol. 60, No. 61 / Thursday, March 30, 1995 / Rules and Regulations
16366 Federal Register / Vol. 60, No. 61 / Thursday, March 30, 1995 / Rules and Regulations Dated: March 14, 1995. Road, Mid-Continent Airport, Wichita, affecting immediate flight safety and, Patricia Jensen, Kansas 67209; telephone (316) 946± thus, was not preceded by notice and Acting Assistant Secretary, Marketing and 4124; facsimile (316) 946±4407. opportunity to comment, comments are Regulatory Programs. SUPPLEMENTARY INFORMATION: The FAA invited on this rule. Interested persons [FR Doc. 95±6906 Filed 3±29±95; 8:45 am] has received a report of an in-flight are invited to comment on this rule by BILLING CODE 3410±EN±P separation of the elevator trim tab submitting such written data, views, or control (``nose up'' and ``nose down'') arguments as they may desire. cable on a Beech Model 1900D airplane. Communications should identify the DEPARTMENT OF TRANSPORTATION The reported cable separation prevented Rules Docket number and be submitted the airplane flight crew from using in triplicate to the address specified Federal Aviation Administration manual and electrical nose up trim, and above. All communications received on the flight crew experienced high or before the closing date for comments 14 CFR Part 39 elevator ``nose down'' control forces. will be considered, and this rule may be amended in light of the comments [Docket No. 95±CE±15±AD; Amendment 39± The flight crew was then able to land 9184; AD 95±02±17] the airplane without further incident. received. Factual information that Investigation of this incident showed supports the commenter's ideas and Airworthiness Directives; Beech that the elevator trim tab control cable suggestions is extremely helpful in Aircraft Corporation Model 1900D had separated in the vicinity of its guide evaluating the effectiveness of the AD Airplanes pulley, which is located at the top of the action and determining whether vertical stabilizer. -

David W. Levy the University of Michigan Department of Aerospace Engineering Ann Arbor, MI
David W. Levy The University of Michigan Department of Aerospace Engineering Ann Arbor, MI to copy or republish, c and Astrona~lcs esi sin leron Controls David W. Levy * The University of Michigan Department of Aerospace Engineering Abstract Gyro axis angular rate Laplace transform variable The use of a control tab in a simple autopilot is dis- Aileron surface area cussed. The system is different from conventional in- Rate gyro tilt angle stallations in that the autopilot does not move the Aileron deflection main control surface directly with a servo actuator. Tab deflection A servo tab is used to provide the necessary hinge Feedback error signal moment. A much smaller control actuator may then Laplace transform operator be used. A further benefit of this approach is that Control system natural frequency the system may be operated full-time with only mi- nor control force feedback to the pilot. For the case of Acronyms: the wing leveler system, the result is a full time sta- bility augmentation system in the lateral axis. With IFR Instrument Flight Rules improved stability, a large number of accidents due IMC Instrument Meteorological Conditions to loss of control could be prevented. Pilot workload SSSA Separate Surface Stability Augmentation is also reduced. The failure modes of such a system VFR Visual Flight Rules are benign, eliminating the need for redundancy and VMC Visual Meteorological Conditions the associated costs. The system is shown to be sta- ble and effective using either angular rate or attitude feedback. For the case of the light, four seat airplane Introduction studied, the basic wing leveler would weigh less than nine pounds and would cost no more than a compara- The vast majority of airplanes in service today have ble conventional autopilot. -
What's New In
Design • Analysis • Research What’s New in AAA? Version 3.5.1 and Version 3.5 September 2013 AAA 3.5.1 contains various enhancements and revisions to version 3.5 and 3.4 as well as bug fixes. Section 1 shows the enhancements and modifications made to AAA. Major enhancements include new modules and calculations. The second section contains bug fixes. The AAA Manual describes the installation procedure and all modules. The manual is available in pdf format on the installation CD. What’s New in AAA 3.5.1? 1 1. Enhancements and Modifications – AAA 3.5.1 Differences between AAA 3.5.1 and AAA 3.5 are: 1. Cl and Cn have similar input/output parameters as Cl and Cn δrv δrv δr δr 2. The limits on material weight factors have been removed in Class II Weight. 3. The pylon root sweep angle can be defined. 4. Thrust from Drag in the Propulsion module is added to the Recalculate All module. 5. Cost Escalation Factor is updated through August 2013 6. The total wetted areas for nacelles, pylons, tailbooms, stores and floats are now calculated. 7. The airplane equivalent skin friction coefficient is now calculated based on airplane wetted area, C and wing planform area. Do 2. Enhancements and Modifications – AAA 3.5 Differences between AAA 3.5 and AAA 3.4 are: 1. Multiple segmented high lift devices can now be entered. 2. There is new option for Flap or Slat definition in the configuration dialog window 3. There is an additional Payload Reload mission segment option in weight sizing. -
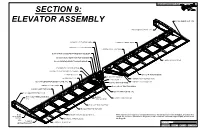
Section 9: Elevator Assembly
VAN'S AIRCRAFT, INC. SECTION 9: ELEVATOR ASSEMBLY E-1022 SHEAR CLIP, 3 PL E-904 INBOARD TIP RIB, 2 PL WD-605-R-1 ELEVATOR HORN E-00902-1R FRONT SPAR WD-605-L-1 ELEVATOR HORN E-00900A RIGHT TOP SKIN E-01410 TRIM ACCESS REINFORCEMENT DOUBLER WH-00073 ELEVATOR PITCH TRIM HARNESS E-00907-1R REAR SPAR E-01411 REINFORCEMENT DOUBLER BRACE ES-MSTS-T3-12A TRIM SERVO E-01409-L SERVO SUPPORT C-CHANNEL E-1008B RIB, 12 PL E-01423-R TRAILING EDGE E-905 LEFT ROOT RIB E-1008A RIB, 11 PL E-00900B RIGHT BOTTOM SKIN E-921 GUSSET E-910 HINGE REINFORCEMENT PLATE, 4 PL E-00906-1 RIGHT ROOT RIB E-01403 TRIM TAB HINGE E-00902-1L FRONT SPAR E-917 & E-918 TRIM TAB HORNS E-00901A LEFT TOP SKIN E-01408 TRIM TAB RIB, 3 PL E-614 COUNTERWEIGHT, 4 PL E-913 COUNTERBALANCE SKIN, E-01405 E-01401 TRIM PUSHROD 2 PL TRIM TAB SPAR E-01423-T TRAILING EDGE E-01406 TRIM TAB TOP SKIN E-903 E-00924 TRAILING EDGE RIB, 8 PL NOTE: Special tools required to complete this section; 150 grit aluminum oxide sandpaper, a modified 3/32 OUTBOARD dimple die, a reduced diameter 3/32 dimple die, a #40 countersink cutter with a tapered pilot, and a notched TIP RIB, E-01423-L TRAILING EDGE riveting yoke. 2 PL E-00901B E-00907-1L REAR SPAR DATE OF COMPLETION: LEFT BOTTOM SKIN PARTICIPANTS: DATE: 03/03/15REVISION: 1 RV-14 PAGE 09-01 VAN'S AIRCRAFT, INC. -

Do You Really Understand How Your Trim Works? Many Do Not, and Why It Matters
Do you really understand how your trim works? Many do not, and why it matters. Alex Fisher - GAPAN Picture yourself in a conventional airliner, say a 737 of any generation. You have to do a low level go-around, perhaps because your fail passive Cat lll has just failed, er, passively. You apply GA thrust, and the aircraft pitches up. If you are low enough, you may already have some extra helpful nose up trim applied thanks to the ‘design feature’ 1. Conventional Trimming that ensures that in the event of AP failure at low level, the aircraft pitches up not down, and so a few units of nose up trim are applied late in the approach. Your speed is low, a. Initial trimmed state about V app and the thing is pitching firmly upward. You need ample forward stick/elevator to restrain it. You don’t Trim wheel want to carry this load for long so you retrim. Question: if you run the trim forward while maintaining forward pressure on the wheel, what happens? Hands up all those who think the load reduces to zero. I see a lot of hands. My unscientific polling to date suggests that just about everyone is convinced that this is what happens, but it doesn’t. b. Forward column… Nearly everyone of my generation trained on a Cessna 150 or a Piper PA28. You fly those aircraft by putting the attitude where you want it, holding it there by holding the stick rigid and retrimming until the load goes to zero. In fact if you didn’t do that, but were too quick and started trimming before the aircraft was stable, the instructor would exhibit a severe sense of humour failure. -

Cirrus Airplane Maintenance Manual Model Sr22
CIRRUS AIRPLANE MAINTENANCE MANUAL MODEL SR22 RUDDER 1. GENERAL The rudder provides airplane directional (yaw) control and includes a rudder trim tab used for yaw trim adjustment. The rudder is of conventional design with skin, spar and ribs manufactured of aluminum. The rudder is attached to the aft vertical stabilizer shear web at three hinge points and to the fuselage tailcone at the rudder control bellcrank. Rudder motion is transferred from conventional rudder pedals to the rudder by a single cable system under the cabin floor to the elevator sector pulley in the aft fuselage. A push-pull tube from the sector to the rud- der bellcrank translates cable motion to the rudder. Springs connected to the rudder pedal assembly close the loop and provide centering force. EFFECTIVITY: All 55-40 Page 1 15 Apr 2007 CIRRUS AIRPLANE MAINTENANCE MANUAL MODEL SR22 2. MAINTENANCE PRACTICES A. Rudder Assembly (See Figure 55-401) (1) Removal - Rudder Assembly (a) Remove cotter pin, nut, washers, and bolt securing rudder push/pull rod to rudder. (b) Remove cotter pins from bolts securing rudder to vertical stabilizer. (c) Remove lower bolt, washers, and castellated nut securing rudder to vertical stabilizer. (d) Serials 0004 thru 0168: Disconnect rudder trim wire harness. (e) While supporting rudder assembly, remove upper and center bolts, washers, and castel- lated nuts securing rudder assembly to vertical stabilizer. Remove rudder assembly from vertical stabilizer. (2) Disassembly - Rudder Assembly Rudder assembly may be further disassembled through removal of trim tab and rudder bottom. (a) Rudder Trim Tab 1 Acquire necessary parts, tools, equipment, and supplies. -

USAF Aircraft Accident Investigation Board
UNITED STATES AIR FORCE AIRCRAFT ACCIDENT INVESTIGATION BOARD REPORT T-38A, T/N 64-13304 1ST RECONNAISSANCE SQUADRON 9TH RECONNAISSANCE WING BEALE AIR FORCE BASE, CALIFORNIA LOCATION: SACRAMENTO MATHER AIRPORT, CALIFORNIA DATE OF ACCIDENT: 18 FEBRUARY 2021 BOARD PRESIDENT: COLONEL ROBERT T. RAYMOND Conducted IAW Air Force Instruction 51-307 EXECUTIVE SUMMARY UNITED STATES AIR FORCE AIRCRAFT ACCIDENT INVESTIGATION T-38A, T/N 64-13304 Sacramento Mather Airport, California 18 February 2021 On 18 February 2021 the mishap pilot (MP) and mishap instructor pilot (MIP), flying T-38A tail number (T/N) 64-13304, assigned to the 1st Reconnaissance Squadron, Beale Air Force Base (AFB), California, flew a day training mission that included practice landings at nearby Sacramento Mather Airport. During a touch-and-go landing attempt at Mather Airport, at approximately 1648 Zulu, or 0848 Local Time (L), the mishap aircraft (MA) impacted the runway without its landing gear fully extended. The total cost of damage to the MA was $3,001,563. The flight was planned as a single-ship training mission from Beale AFB consisting of practice maneuvers in a local military operating area (MOA), practice approaches and landings at Mather Airport and a planned return to Beale AFB. After completing practice maneuvers in the MOA, the MIP flew the MA to Mather Airport and executed an uneventful approach to a touch-and-go landing on Runway 22 Left (22L). The MP then flew a second practice approach to Runway 22L and attempted a touch-and-go landing. After the MA touched down the MP initiated the takeoff portion of the maneuver, advancing the throttles and raising the landing gear lever.