Beam with Adaptive Divergence Angle in Free-Space Optical
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Beam Profiling by Michael Scaggs
Beam Profiling by Michael Scaggs Haas Laser Technologies, Inc. Introduction Lasers are ubiquitous in industry today. Carbon Dioxide, Nd:YAG, Excimer and Fiber lasers are used in many industries and a myriad of applications. Each laser type has its own unique properties that make them more suitable than others. Nevertheless, at the end of the day, it comes down to what does the focused or imaged laser beam look like at the work piece? This is where beam profiling comes into play and is an important part of quality control to ensure that the laser is doing what it intended to. In a vast majority of cases the laser beam is simply focused to a small spot with a simple focusing lens to cut, scribe, etch, mark, anneal, or drill a material. If there is a problem with the beam delivery optics, the laser or the alignment of the system, this problem will show up quite markedly in the beam profile at the work piece. What is Beam Profiling? Beam profiling is a means to quantify the intensity profile of a laser beam at a particular point in space. In material processing, the "point in space" is at the work piece being treated or machined. Beam profiling is accomplished with a device referred to a beam profiler. A beam profiler can be based upon a CCD or CMOS camera, a scanning slit, pin hole or a knife edge. In all systems, the intensity profile of the beam is analyzed within a fixed or range of spatial Haas Laser Technologies, Inc. -
5.Laser Vocabulary
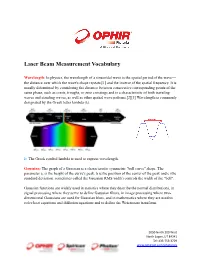
! Laser Beam Measurement Vocabulary Wavelength: In physics, the wavelength of a sinusoidal wave is the spatial period of the wave— the distance over which the wave's shape repeats,[1] and the inverse of the spatial frequency. It is usually determined by considering the distance between consecutive corresponding points of the same phase, such as crests, troughs, or zero crossings and is a characteristic of both traveling waves and standing waves, as well as other spatial wave patterns.[2][3] Wavelength is commonly designated by the Greek letter lambda (λ). " λ: The Greek symbol lambda is used to express wavelength. Gaussian: The graph of a Gaussian is a characteristic symmetric "bell curve" shape. The parameter a, is the height of the curve's peak, b is the position of the center of the peak and c (the standard deviation, sometimes called the Gaussian RMS width) controls the width of the "bell". Gaussian functions are widely used in statistics where they describe the normal distributions, in signal processing where they serve to define Gaussian filters, in image processing where two- dimensional Gaussians are used for Gaussian blurs, and in mathematics where they are used to solve heat equations and diffusion equations and to define the Weierstrass transform. 3050 North 300 West North Logan, UT 84341 Tel: 435-753-3729 www.ophiropt.com/photonics https://en.wikipedia.org/wiki/Gaussian_function " A Gaussian beam is a beam that has a normal distribution in all directions similar to the images below. The intensity is highest in the center of the beam and dissipates as it reaches the perimeter of the beam. -

Laser Beam Profile Meaurement System Time
Measurement of Laser Beam Profile and Propagation Characteristics 1. Laser Beam Measurement Capabilities Laser beam profiling plays an important role in such applications as laser welding, laser focusing, and laser free-space communications. In these applications, laser profiling enables to capture the data needed to evaluate the change in the beam width and determine the details of the instantaneous beam shape, allowing manufacturers to evaluate the position of hot spots in the center of the beam and the changes in the beam’s shape. Digital wavefront cameras (DWC) with software can be used for measuring laser beam propagation parameters and wavefronts in pulsed and continuous modes, for lasers operating at visible to far- infrared wavelengths: - beam propagation ratio M²; - width of the laser beam at waist w0; - laser beam divergence angle θ x, θ y; - waist location z-z0; - Rayleigh range zRx, zRy; - Ellipticity; - PSF; - Wavefront; - Zernike aberration modes. These parameters allow: - controlling power density of your laser; - controlling beam size, shape, uniformity, focus point and divergence; - aligning delivery optics; - aligning laser devices to lenses; - tuning laser amplifiers. Accurate knowledge of these parameters can strongly affect the laser performance for your application, as they highlight problems in laser beams and what corrections need to be taken to get it right. Figure 1. Characteristics of a laser beam as it passes through a focusing lens. http://www.SintecOptronics.com http://www.Sintec.sg 1 2. Beam Propagation Parameters M², or Beam Propagation Ratio, is a value that indicates how close a laser beam is to being a single mode TEM00 beam. -

Optics of Gaussian Beams 16
CHAPTER SIXTEEN Optics of Gaussian Beams 16 Optics of Gaussian Beams 16.1 Introduction In this chapter we shall look from a wave standpoint at how narrow beams of light travel through optical systems. We shall see that special solutions to the electromagnetic wave equation exist that take the form of narrow beams – called Gaussian beams. These beams of light have a characteristic radial intensity profile whose width varies along the beam. Because these Gaussian beams behave somewhat like spherical waves, we can match them to the curvature of the mirror of an optical resonator to find exactly what form of beam will result from a particular resonator geometry. 16.2 Beam-Like Solutions of the Wave Equation We expect intuitively that the transverse modes of a laser system will take the form of narrow beams of light which propagate between the mirrors of the laser resonator and maintain a field distribution which remains distributed around and near the axis of the system. We shall therefore need to find solutions of the wave equation which take the form of narrow beams and then see how we can make these solutions compatible with a given laser cavity. Now, the wave equation is, for any field or potential component U0 of Beam-Like Solutions of the Wave Equation 517 an electromagnetic wave ∂2U ∇2U − µ 0 =0 (16.1) 0 r 0 ∂t2 where r is the dielectric constant, which may be a function of position. The non-plane wave solutions that we are looking for are of the form i(ωt−k(r)·r) U0 = U(x, y, z)e (16.2) We allow the wave vector k(r) to be a function of r to include situations where the medium has a non-uniform refractive index. -

Laser Threshold
Main Requirements of the Laser • Optical Resonator Cavity • Laser Gain Medium of 2, 3 or 4 level types in the Cavity • Sufficient means of Excitation (called pumping) eg. light, current, chemical reaction • Population Inversion in the Gain Medium due to pumping Laser Types • Two main types depending on time operation • Continuous Wave (CW) • Pulsed operation • Pulsed is easier, CW more useful Optical Resonator Cavity • In laser want to confine light: have it bounce back and forth • Then it will gain most energy from gain medium • Need several passes to obtain maximum energy from gain medium • Confine light between two mirrors (Resonator Cavity) Also called Fabry Perot Etalon • Have mirror (M1) at back end highly reflective • Front end (M2) not fully transparent • Place pumped medium between two mirrors: in a resonator • Needs very careful alignment of the mirrors (arc seconds) • Only small error and cavity will not resonate • Curved mirror will focus beam approximately at radius • However is the resonator stable? • Stability given by g parameters: g1 back mirror, g2 front mirror: L gi = 1 − ri • For two mirrors resonator stable if 0 < g1g2 < 1 • Unstable if g1g2 < 0 g1g2 > 1 • At the boundary (g1g2 = 0 or 1) marginally stable Stability of Different Resonators • If plot g1 vs g2 and 0 < g1g2 < 1 then get a stability plot • Now convert the g’s also into the mirror shapes Polarization of Light • Polarization is where the E and B fields aligned in one direction • All the light has E field in same direction • Black Body light is not polarized -

Experimental Studies and Simulation of Laser Ablation of High-Density Polyethylene Films by Sandeep Ravi Kumar a Thesis Submitte
Experimental studies and simulation of laser ablation of high-density polyethylene films by Sandeep Ravi Kumar A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Industrial Engineering Program of Study Committee: Hantang Qin, Major Professor Beiwen Li Matthew Frank The student author, whose presentation of the scholarship herein was approved by the program of study committee, is solely responsible for the content of this thesis. The Graduate College will ensure this thesis is globally accessible and will not permit alterations after a degree is conferred. Iowa State University Ames, Iowa 2020 Copyright © Sandeep Ravi Kumar, 2020. All rights reserved. ii DEDICATION I dedicate my thesis work to my family and many friends. A special feeling of gratitude to my loving parents Ravi Kumar and Vasanthi, whose words of encouragement have made me what I am today. iii TABLE OF CONTENTS Page LIST OF FIGURES .................................................................................................................... v LIST OF TABLES ....................................................................................................................vii NOMENCLATURE ................................................................................................................ viii ACKNOWLEDGMENTS .......................................................................................................... ix ABSTRACT .............................................................................................................................. -

Diffraction Effects in Transmitted Optical Beam Difrakční Jevy Ve Vysílaném Optickém Svazku
BRNO UNIVERSITY OF TECHNOLOGY VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FACULTY OF ELECTRICAL ENGINEERING AND COMMUNICATION DEPARTMENT OF RADIO ELECTRONICS FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ ÚSTAV RADIOELEKTRONIKY DIFFRACTION EFFECTS IN TRANSMITTED OPTICAL BEAM DIFRAKČNÍ JEVY VE VYSÍLANÉM OPTICKÉM SVAZKU DOCTORAL THESIS DIZERTAČNI PRÁCE AUTHOR Ing. JURAJ POLIAK AUTOR PRÁCE SUPERVISOR prof. Ing. OTAKAR WILFERT, CSc. VEDOUCÍ PRÁCE BRNO 2014 ABSTRACT The thesis was set out to investigate on the wave and electromagnetic effects occurring during the restriction of an elliptical Gaussian beam by a circular aperture. First, from the Huygens-Fresnel principle, two models of the Fresnel diffraction were derived. These models provided means for defining contrast of the diffraction pattern that can beused to quantitatively assess the influence of the diffraction effects on the optical link perfor- mance. Second, by means of the electromagnetic optics theory, four expressions (two exact and two approximate) of the geometrical attenuation were derived. The study shows also the misalignment analysis for three cases – lateral displacement and angular misalignment of the transmitter and the receiver, respectively. The expression for the misalignment attenuation of the elliptical Gaussian beam in FSO links was also derived. All the aforementioned models were also experimentally proven in laboratory conditions in order to eliminate other influences. Finally, the thesis discussed and demonstrated the design of the all-optical transceiver. First, the design of the optical transmitter was shown followed by the development of the receiver optomechanical assembly. By means of the geometric and the matrix optics, relevant receiver parameters were calculated and alignment tolerances were estimated. KEYWORDS Free-space optical link, Fresnel diffraction, geometrical loss, pointing error, all-optical transceiver design ABSTRAKT Dizertačná práca pojednáva o vlnových a elektromagnetických javoch, ku ktorým dochádza pri zatienení eliptického Gausovského zväzku kruhovou apretúrou. -
![Arxiv:1410.8722V1 [Quant-Ph] 31 Oct 2014](https://docslib.b-cdn.net/cover/0581/arxiv-1410-8722v1-quant-ph-31-oct-2014-1650581.webp)
Arxiv:1410.8722V1 [Quant-Ph] 31 Oct 2014
Divergence of an orbital-angular-momentum-carrying beam upon propagation Miles Padgett1, Filippo M. Miatto2, Martin Lavery1, Anton Zeilinger3;4, and Robert W. Boyd1;2;5 1School of Physics and Astronomy, University of Glasgow, Glasgow G12 8QQ, United Kingdom 2Dept. of Physics, University of Ottawa, 150 Louis Pasteur, Ottawa, Ontario, K1N 6N5 Canada 3Institute for Quantum Optics and Quantum Information (IQOQI), Austrian Academy of Sciences, Boltzmanngasse 3, A-1090 Vienna, Austria 4Vienna Center for Quantum Science and Technology, Faculty of Physics, University of Vienna, Boltzmanngasse 5, A-1090 Vienna, Austria and 5The Institute of Optics, University of Rochester, Rochester, New York 14627, USA (Dated: February 12, 2018) There is recent interest in the use of light beams carrying orbital angular momentum (OAM) for creating multiple channels within free-space optical communication systems. One limiting issue is that, for a given beam size at the transmitter, the beam divergence angle increases with increasing OAM, thus requiring a larger aperture at the receiving optical system if the efficiency of detection is to be maintained. Confusion exists as to whether this divergence scales linarly with, or with the square root of, the beam's OAM. We clarify how both these scaling laws are valid, depending upon whether it is the radius of the Gaussian beam waist or the rms intensity which is kept constant while varying the OAM. I. INTRODUCTION intensity of one of these modes, r(Imax), is given as [3] r ` Over the past 20 years there has been a growing in- r(Imax) = j jw(z); (2) terest in the orbital angular momentum (OAM) of light, 2 which is carried by any optical beam possessing helical p 2 2 1 2 where w(z) = w0 1 + z =zR and zR = 2 kw0 is the phase fronts [1]. -
Laser Far-Field Beam-Profile Measurements by the Focal Plane Technique
Aii'i O ft % NBS TECHNICAL NOTE 1001 *"*€AU Of '' NATIONAL BUREAU OF STANDARDS The National Bureau of Standards^ was established by an act of Congress March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides; (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to pro- mote pubhc safety. The Bureau consists of the Institute for Basic Standards, the Institute for Materials Research, the Institute for Applied Technology, the Institute for Computer Sciences and Technology, the OflSce for Information Programs, and the Office of Experimental Technology Incentives Program. THE INSTITUTE FOR BASIC STANDARDS provides the central basis within the United States of a complete and consist- ent system of physical measurement; coordinates that system with measurement systems of other nations; and furnishes essen- tial services leading to accurate and uniform physical measurements throughout the Nation's scientific community, industry, and commerce. The Institute consists of the Office of Measurement Services, and the following center and divisions: Applied Mathematics — Electricity — Mechanics — Heat — Optical Physics — Center for Radiation Research — Lab- oratory Astrophysics'' — Cryogenics" — Electromagnetics^ — Time and Frequency*. THE INSTITUTE FOR MATERIALS RESEARCH conducts materials research leading to improved methods of measure- ment, standards, and data on the properties of well-characterized materials needed by industry, commerce, educational insti- tutions, and Government; provides advisory and research services to other Government agencies; and develops, produces, and distributes standard reference materials. -

Gaussian Beams • Diffraction at Cavity Mirrors Creates Gaussian Spherical
Gaussian Beams • Diffraction at cavity mirrors creates Gaussian Spherical Waves • Recall E field for Gaussian U ⎛ ⎡ x2 + y2 ⎤⎞ 0 ⎜ ( ) ⎟ u( x,y,R,t ) = exp⎜i⎢ω t − Kr − ⎥⎟ R ⎝ ⎣ 2R ⎦⎠ • R becomes the radius of curvature of the wave front • These are really TEM00 mode emissions from laser • Creates a Gaussian shaped beam intensity ⎛ − 2r 2 ⎞ 2P ⎛ − 2r 2 ⎞ I( r ) I exp⎜ ⎟ exp⎜ ⎟ = 0 ⎜ 2 ⎟ = 2 ⎜ 2 ⎟ ⎝ w ⎠ π w ⎝ w ⎠ Where P = total power in the beam w = 1/e2 beam radius • w changes with distance z along the beam ie. w(z) Measurements of Spotsize • For Gaussian beam important factor is the “spotsize” • Beam spotsize is measured in 3 possible ways • 1/e radius of beam • 1/e2 radius = w(z) of the radiance (light intensity) most common laser specification value 13% of peak power point point where emag field down by 1/e • Full Width Half Maximum (FWHM) point where the laser power falls to half its initial value good for many interactions with materials • useful relationship FWHM = 1.665r1 e FWHM = 1.177w = 1.177r 1 e2 w = r 1 = 0.849 FWHM e2 Gaussian Beam Changes with Distance • The Gaussian beam radius of curvature with distance 2 ⎡ ⎛π w2 ⎞ ⎤ R( z ) = z⎢1 + ⎜ 0 ⎟ ⎥ ⎜ λz ⎟ ⎣⎢ ⎝ ⎠ ⎦⎥ • Gaussian spot size with distance 1 2 2 ⎡ ⎛ λ z ⎞ ⎤ w( z ) = w ⎢1 + ⎜ ⎟ ⎥ 0 ⎜π w2 ⎟ ⎣⎢ ⎝ 0 ⎠ ⎦⎥ • Note: for lens systems lens diameter must be 3w0.= 99% of power • Note: some books define w0 as the full width rather than half width • As z becomes large relative to the beam asymptotically approaches ⎛ λ z ⎞ λ z w(z) ≈ w ⎜ ⎟ = 0 ⎜ 2 ⎟ ⎝π w0 ⎠ π w0 • Asymptotically light -

1. Wave & Beam Optics
Lecture 1 Wave and Beam optics Mostly from Chapters 2, 3, 5 The fundamentals of optics at the introductory level are mostly treated using the “plane wave” model. The plane waves have an infinite extent in the transverse direction. Plane waves, however, never existed in the real world. This lecture is to establish the basics of waves of finite cross section. Wave function Light propagates in the form of waves. In free space, the waves are governed by the wave equation, 1 ∂ 2U ∇ 2U − = 0 (1) c 2 ∂t 2 where u is a function of r and t. In a one-dimensional system, the solutions are u(x-ct) and u(x+ct). From the theory of electromagnetics, both the E and H fields of the electromagnetic waves in vacuum satisfies Eq. (1). The form of Eq.(1) for E and H can be derived from Maxwell’s equations. ∂E ∇ × H = ε 0 ∂t ∂H ∇ × E = −µ 0 Maxqwell 'sequation in free space ∂t ∇ ⋅ E = 0 ∇ ⋅ H = 0 Try to prove that both the E and H satisfy equation (1). The monochromatic harmonic waves can be expressed as jφ (r )− j 2πνt U (r,t) = a(r)e (2) where U is known as the complex wave function, and the real part, u(r,t), is given by u(r,t) = U +U * (3) Why using the harmonic waves? The “ wavefronts” are the surfaces of equal phase φ(r) = cons tan t . The optical intensity (power 2 per unit area) is given by I(r) = U (r) . The Helmhotz Equation: ( governing the spatial dependency of monochromatic waves) 1 For a given harmonic function U, the spatial-temporal differential equation in (1) can be reduced to a differential equation in space only. -

Femtosecond Laser Ablation of Silicon: Nanoparticles, Doping and Photovoltaics
Femtosecond Laser Ablation of Silicon: Nanoparticles, Doping and Photovoltaics A thesis presented by Brian Robert Tull to The School of Engineering and Applied Sciences in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the subject of Applied Physics Harvard University Cambridge, Massachusetts June 2007 c 2007 by Brian Robert Tull All rights reserved. iii Femtosecond Laser Ablation of Silicon: Nanoparticles, Doping and Photovoltaics Eric Mazur Brian R. Tull Abstract In this thesis, we investigate the irradiation of silicon, in a background gas of near atmospheric pressure, with intense femtosecond laser pulses at energy densities exceeding the threshold for ablation (the macroscopic removal of material). We study the resulting structure and properties of the material ejected in the ablation plume as well as the laser irradiated surface itself. The material collected from the ablation plume is a mixture of single crystal silicon nanoparticles and a highly porous network of amorphous silicon. The crystalline nanoparti- cles form by nucleation and growth; the amorphous material has smaller features and forms at a higher cooling rate than the crystalline particles. The size distribution of the crys- talline particles suggests that particle formation after ablation is fundamentally different in a background gas than in vacuum. We also observe interesting structures of coagulated particles such as straight lines and bridges. The laser irradiated surface exhibits enhanced visible and infrared absorption of light when laser ablation is performed in the presence of certain elements|either in the background gas or in a film on the silicon surface. To determine the origin of this enhanced absorption, we perform a comprehensive annealing study of silicon samples irradiated in the presence of three different elements (sulfur, selenium and tellurium).