Final Report: Automated Emergency Braking Systems: Technical Requirements, Costs and Benefits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Emergency Steer & Brake Assist – a Systematic Approach for System Integration of Two Complementary Driver Assistance Syste
EMERGENCY STEER & BRAKE ASSIST – A SYSTEMATIC APPROACH FOR SYSTEM INTEGRATION OF TWO COMPLEMENTARY DRIVER ASSISTANCE SYSTEMS Alfred Eckert Bernd Hartmann Martin Sevenich Dr. Peter E. Rieth Continental AG Germany Paper Number 11-0111 ABSTRACT optimized trajectory. In this respect and beside all technical and physical aspects, the human factor plays a major role for the development of this Advanced Driver Assistance Systems (ADAS) integral assistance concept. Basis for the assist the driver during the driving task to improve development of this assistance concept were subject the driving comfort and therefore indirectly traffic driver vehicle tests to study the typical driver safety, ACC (Adaptive Cruise Control) is a typical behavior in emergency situations. Objective example for a “Comfort ADAS” system. “Safety was on the one hand to analyze the relevant ADAS” directly target the improvement of safety, parameters influencing the driver decision for brake such as a forward collision warning or other and/or steer maneuvers. On the other hand the systems which assist the driver during an evaluation should result in a proposal for a emergency situation. A typical application for a preferable test setup, which can be used for use case “Safety ADAS” is EBA (Emergency Brake Assist), evasion and/or braking tests to clearly evaluate the which additionally integrates information of benefit of the system and the acceptance of normal surrounding sensors into the system function. drivers. Definition of assistance levels, warnings While systems in the longitudinal direction, such as and intervention cascade, based on physical aspects EBA, have achieved a high development status and and an analysis of driver behavior using objective are already available in the market (e.g. -

Investor Presentation April 2020 (Fact Book 2019)
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24.4 x 7.6 cm) Investor Presentation April 2020 (Fact Book 2019) www.continental.com Investor Relations Agenda 1 Continental at a Glance 2 2 Strategy 13 3 Automotive Group 24 3.1 Chassis & Safety → Autonomous Mobility and Safety 34 3.2 Interior → Vehicle Networking and Information 48 3.3 Powertrain → Vitesco Technologies 60 4 Rubber Group 63 4.1 Tires 69 4.2 ContiTech 83 5 Corporate Governance 91 6 Sustainability 101 7 Shares and Bonds 113 8 Glossary 120 2 Investor Presentation, April 2020 © Continental AG 1 | Continental at a Glance One of the World’s Leading Technology Companies for Mobility › Continental develops pioneering technologies and services for sustainable and €44.5 billion connected mobility of people and their goods. 2019 sales › We offer safe, efficient, intelligent, and affordable solutions for vehicles, machines, traffic and transportation. › Continental was founded in 1871 and is headquartered in Hanover, Germany. 241,458 employees (December 31, 2019) 2019 sales by group Rubber Group 595 Locations 40% in 59 countries and markets (December 31, 2019) Automotive Group 60% 3 Investor Presentation, April 2020 © Continental AG 1 | Continental at a Glance Founded in 1871, Expanding into Automotive Electronics Since 1998 Continental-Caoutchouc- and Continental expands its activities in telematics Continental expands Gutta-Percha Compagnie is and other fields by acquiring the automotive Continental expands its expertise in founded in Hanover, Germany. electronics business from Motorola. software and systems vehicle antennas by expertise through the acquiring Kathrein Acquisition of a US Continental reinforces its acquisition of Elektrobit. -
Facts & Figures 2016
SensePlanAct Facts & Figures 2016 Chassis & Safety SensePlanAct Contents 2 3 04 Chassis & Safety Division 52 Chassis & position sensors 04 SensePlanAct – Intelligent controls for 54 Engine and transmission speed sensors the mobility of today and tomorrow 56 Electronic control units for various applications 06 Key Figures – an Overview 58 Service Provider for Integrated Safety 08 Continental Corporation 10 Continental Careers 60 Driver Assistance Systems 61 Emergency Brake Assist 12 Automated Driving 62 Adaptive Cruise Control 62 Surround View 14 Vehicle Dynamics 63 Mirror Replacement 14 Chassis Domain Control Unit 63 Blind Spot Detection 14 Chassis control units for vertical dynamics 63 Rear Cross Traffic Alert (RCTA) 15 Electronic air suspension systems 64 Traffic Sign Recognition 15 Dynamic Body Roll Stabilization 65 Lane Departure Warning 17 Electronic brakes for controlling driving dynamics 65 Intelligent Headlamp Control 17 MK 100 – the new generation of electronic brakes 65 Combined sensors for more complex driving situations 21 Additional added value functions of the electronic brake 21 MK C1 – more dynamic and efficient braking through integration 66 Quality 22 Safety on two wheels – Electronic Brake Systems for motorcycles 68 Worldwide Locations 24 Hydraulic Brake Systems 70 Locations in Germany 24 Continental disc brakes – high-performance in all situations 72 Locations in Europe 26 Drum brake 74 Locations in the Americas 26 Parking brake systems 76 Locations in Asia 29 Brake actuation and brake assist systems 31 Brake assist -

Issues in Autonomous Vehicle Testing and Deployment
Issues in Autonomous Vehicle Testing and Deployment Updated April 23, 2021 Congressional Research Service https://crsreports.congress.gov R45985 SUMMARY R45985 Issues in Autonomous Vehicle Testing and April 23, 2021 Deployment Bill Canis Autonomous vehicles have the potential to bring major improvements in highway safety. Motor Specialist in Industrial vehicle crashes caused an estimated 36,096 fatalities in 2019; a study by the National Highway Organization and Business Traffic Safety Administration (NHTSA) has shown that 94% of crashes involve human error. For this and other reasons, federal oversight of the testing and deployment of autonomous vehicles has been of considerable interest to Congress. In the 115th Congress, autonomous vehicle legislation passed the House as H.R. 3388, the SELF DRIVE Act, and a separate bill, S. 1885, the AV START Act, was reported from a Senate committee. Neither bill was enacted. Comprehensive legislation concerning autonomous vehicles was not introduced in the 116th Congress, but the America’s Transportation Infrastructure Act of 2019, S. 2302, which was reported by the Senate Environment and Public Works Committee, would have encouraged research and development of infrastructure that could accommodate new technologies such as autonomous vehicles. Comprehensive legislation has not been introduced in the 117th Congress as of the date of this report. In recent years, private and government testing of autonomous vehicles has increased significantly, although it is likely that widespread use of fully autonomous vehicles—with no driver attention needed—lies many years in the future. The pace of autonomous vehicle commercialization was slowed after to the 2018 death in Arizona of a pedestrian struck by an autonomous vehicle, which highlighted the challenges of duplicating human decisionmaking by artificial intelligence. -
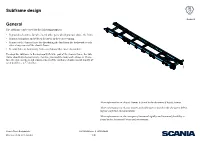
Subframe Design General
Subframe design General General The subframe can be used for the following purposes: • It provides clearance for wheels and other parts which protrude above the frame. • It provides rigidity and reduces the stress in the rear overhang. • It protects the chassis frame by distributing the load from the bodywork evenly over a larger area of the chassis frame. • It contributes to dampening frame oscillations that cause discomfort. To adapt the subframe to the torsionally flexible part of the chassis frame, the sub- frame should also be torsionally flexible, provided the bodywork allows it. There- fore, the side members and crossmembers of the subframe should consist mainly of open profiles, e.g. U-profiles. 376 530 More information on chassis frames is found in the document Chassis frames. More information on chassis frames and subframes is found in the document Select- ing the subframe and attachment. More information on the concepts of torsional rigidity and torsional flexibility is found in the document Forces and movements. Scania Truck Bodybuilder 22:10-649 Issue 2 2016-09-02 © Scania CV AB 2016, Sweden 1 (8) Subframe design General The subframe can appear differently depending on the characteristics required. The subframe length can vary. It can cover the whole chassis frame or be short and only cover part of the chassis frame. The height of the chassis frame can be adjusted to the current area of application. 376 541 Example of a subframe. Scania Truck Bodybuilder 22:10-649 Issue 2 2016-09-02 © Scania CV AB 2016, Sweden 2 (8) Subframe design General Side members The subframe’s side members are usually manufactured from U-profiles, just as the chassis frame’s side members. -

Public Support Measures for Connected and Automated Driving
Public support measures for connected and automated driving PUBLIC SUPPORT MEASURES FOR CONNECTED AND AUTOMATED DRIVING Final Report Tender No. GROW-SME-15-C-N102 within the Framework contract No. ENTR/300/PP/2013/FC Written by SPI, VTT and ECORYS May - 2017 Page | i Public support measures for connected and automated driving Europe Direct is a service to help you find answers to your questions about the European Union. Freephone number (*): 00 800 6 7 8 9 10 11 (*) The information given is free, as are most calls (though some operators, phone boxes or hotels may charge you). Reference No. GROW-SME-15-C-N102 Framework contract No. ENTR/300/PP/2013/FC 300/PP/2013/FC The information and views set out in this study are those of the authors and do not necessarily reflect the official opinion of the European Commission. The European Commission does not guarantee the accuracy of the data included in this study. Neither the European Commission nor any person acting on the European Commission’s behalf may be held responsible for the use which may be made of the information contained herein. More information on the European Union is available on the Internet (http://www.europa.eu). ISBN 978-92-9202-254-9 doi: 10.2826/083361 AUTHORS OF THE STUDY Sociedade Portuguesa de Inovação (SPI – Coordinator): Augusto Medina, Audry Maulana, Douglas Thompson, Nishant Shandilya and Samuel Almeida. VTT Technical Research Centre of Finland (VTT): Aki Aapaoja and Matti Kutila. ECORYS: Erik Merkus and Koen Vervoort Page | ii Public support measures for connected and automated driving Contents Acronym Glossary ................................................................................................ -

A Thesis Entitled Design, Analysis and Optimization of Rear Sub-Frame Using Finite Element Modeling and Modal Analysis by Gaurav
A Thesis entitled Design, Analysis and Optimization of Rear Sub-frame using Finite Element Modeling and Modal Analysis by Gaurav Kesireddy Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Mechanical Engineering _________________________________________ Dr. Hongyan Zhang, Committee Chair _________________________________________ Dr. Sarit Bhaduri, Committee Member _________________________________________ Dr. Matthew Franchetti, Committee Member _________________________________________ Dr. Amanda Bryant-Friedrich, Dean College of Graduate Studies The University of Toledo May 2017 Copyright 2017, Gaurav Kesireddy This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author. An Abstract of Design, Analysis and Optimization of Rear Sub-frame using Finite Element Modeling and Modal Analysis by Gaurav Kesireddy Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Mechanical Engineering The University of Toledo May 2017 A sub-frame is a structural component of an automobile that carries suspension, exhaust, engine room, etc. The sub-frame is generally bolted to Body in White(BIW). It is sometimes equipped with springs and bushes to dampen vibration. The principal purposes of using a sub-frame are, to spread high chassis loads over a wide area of relatively thin sheet metal of a monocoque body shell, and to isolate vibration and harshness from the rest of the body. As a natural development from a car with a full chassis, separate front and rear sub-frames are used in modern vehicles to reduce the overall weight and cost. In addition, a sub-frame yields benefits to production in that subassemblies can be made which can be introduced to the main body shell when required on an automated line. -

AUSTRALIA Robert Hogan General Manager, Vehicle Safety Standards
GOVERNMENT STATUS REPORT – was 3.3 per cent. Hospital admissions data also AUSTRALIA point to little, if any, national improvement in the number of people who were seriously injured in road crashes. Robert Hogan General Manager, Vehicle Safety Standards National Road Safety Strategy 2001–2010 Department of Infrastructure and Transport In November 2000, Australia’s transport Ministers AUSTRALIA endorsed the National Road Safety Strategy 2001– 2010. The strategy provided a framework for prioritising the road safety activities of federal, STATUS OF SAFETY PROBLEMS AND state, territory and local governments, as well as TRENDS other organisations that could influence road safety outcomes. Its target was to reduce the annual road General progress fatality rate by at least 40 per cent over the 10-year Australia has achieved substantial reductions in period to the end of 2010: from 9.3 deaths to no road crash fatalities over the last 30 years, despite a more than 5.6 deaths per 100,000 population. 50 per cent growth in population and a two-fold increase in registered motor vehicles. Between Despite significant gains over the decade, the 40 1980 and 2010, the nation's annual road fatality rate per cent reduction target was not reached (see declined from 22.3 to 6.1 deaths per 100,000 Figure 2). By the end of 2010 an actual reduction people. of 34 per cent had been achieved and the fatality rate stood at 6.1 deaths per 100,000 population – The chart below shows the progressive reduction in some way short of the 5.6 target. -

Vehicle Make: Model: Chassis Number (Full): Registration/Retail Date: Registration Number: Miles/Kilometres: Assessment Date: Be
BENTLEY CERTIFIED PRE-OWNED EXTENDED SERVICE PROGRAM TECHNICAL INSPECTION TECHNICAL INSPECTION Vehicle Make: Model: Registration Number: Miles/Kilometres: Registration/Retail Date: Chassis Number (Full): Bentley Certified Technician: Assessment Date: I. CHECK FOR LEVELS AND LEAKS III. OPERATION AND CONDITION CHECK V. AFTER ROAD TEST 1. Engine Oil 37. Ignition/Starter 71. Check for Visible Leaks 2. Transmission Oil 38. Suspension and Shock Absorbers 72. Glass for Chips, Cracks, 3. Power Steering Fluid 39. Engine and Suspension Mountings Delamination and Correct/Legal Tint 4. Brake Fluid 40. Steering and Suspension Joints 73. Bodywork Commensurate with Age/Miles (no dents or scratches) 5. Hydraulic Oil 41. Wheel Bearings for wear 74. Carpets Commensurate with 6. Engine Coolant (inc specific gravity) and adjustment Age and Mileage (appearance 42. Rubber Boots and Gaiters 7. Washer Reservoir and security) 43. Propeller Shaft/Drive Shafts - 8. Fuel System Leaks 75. Upholstery and Headlining Condition/Tightness 9. Final Drive Oil (appearance and security) 44. All Drive Belts - Condition/Tightness 76. Veneers and trim (appearance II. FUNCTION TEST 45. Brake Pipes and Hoses - and security) Condition and Security 10. Check for Oustanding Recalls/ 46. Brake pads for Wear/Serviceability VI. FINAL PREPARATION Service Campaigns and Software 47. Underbody and Exhaust (including Downloads 77. Check Service History and Update the Catalytic Convertor) - Damage/ if Necessary 11. Parking Brake Operation Corrosion 78. Check the Operation of the Spare 12. Bonnet/Boot Release and 48. Check Operation of Exhaust Key Fob Safety Catch Solenoid Valve 79. Compliance with Statutory 13. Operation of Doors, Boot, 49. Clear Body Drains Glove Box etc. -
Issues in Autonomous Vehicle Deployment Name Redacted Specialist in Industrial Organization and Business
Issues in Autonomous Vehicle Deployment name redacted Specialist in Industrial Organization and Business Updated May 17, 2018 Congressional Research Service 7-.... www.crs.gov R44940 Issues in Autonomous Vehicle Deployment Summary Legislation recently passed by the House of Representatives—H.R. 3388—and pending in the Senate—S. 1885—would provide new regulatory tools to the National Highway Traffic Safety Administration (NHTSA) to oversee autonomous vehicles. Autonomous vehicles are seen as a way to reduce motor vehicle crashes; for example, there were 37,461 deaths from motor vehicle crashes in 2016 and nearly all of them were caused by driver error. However, despite unanimous approval in House and Senate committees and on the House floor, the legislation has proven controversial in the wake of several high-profile accidents involving autonomous vehicles being tested on public roads. At present, no fully autonomous vehicles are available for public use. Many new vehicles have automated some driver functions, but all require a human to monitor the driving environment and control the vehicle. However, rapid advances in technology have made it likely that vehicles with high levels of automation will be on the market within a few years, raising questions about the adequacy of existing methods of safety oversight. The federal government and the states share motor vehicle regulation, with the federal government responsible for vehicle safety and states for driver-related aspects such as licensing and registration. While NHTSA has the statutory authority to regulate all types of motor vehicles, its traditional standard-setting process would take many years at a time when vehicle innovation is changing rapidly; standards envisioned now could be obsolete by the time they took effect. -

CHOP PCPS IR Report 03
The State of Child Occupant Protection Interim Report 2003 Monitoring Trends In its fifth year of data collection, the Partners for Child Passenger Safety (PCPS) research team works simultaneously in each phase of the research-to-action-cycle with a continued focus on saving children from injury and death in motor vehicle crashes. The team has gone beyond identification and in-depth study of crashes involving children to develop- ment and implementation of interventions. Monitoring trends over time is a vital next step to evaluate the success of these efforts. The field of child occupant protection has experienced a recent infusion of new technology, laws and targeted educational campaigns fueled, in part, by PCPS research findings. Further, there are approximately 4 million births in the United States each year. Each day, new parents learn about child passenger safety (CPS) issues for the first time. 1 Surveillance PCPS’ continued surveillance of children in automobile 6 2 crashes serves as a unique national resource that helps Impact Identify Issues set the agenda for improving the protection of chil- Research-to-Action INSIDE Cycle dren. Real-world current data provide a snapshot of Trends 2 how our nation’s children fare in motor vehicle crash- Research Findings 2002-2003 4 es, and in-depth engineering studies by the research 5 3 Intervention 6 team identify how their protection can be Intervention In-depth Study improved. Impact 7 4 Recognizing the importance of continued monitoring, Publish Research Research Review 8 State Farm Insurance Companies® and The Children’s Hospital of Philadelphia have renewed their commitment to child passenger safety by extending PCPS to at least 2005. -

NEVER SETTLE. It’S Your Adventure
NEVER SETTLE. It’s your adventure. 2021 ENTEGRA CHASSIS GUIDE | SPARTANRVCHASSIS.COM THE PREMIER 1 Safe Haul™ integrated tow FOUNDATION. vehicle braking system 2 Side-mounted At the bottom of it all is the Spartan chassis, service center made from the finest materials and engineered to give your luxury coach a safe, 3 Campground-friendly smooth, and reliable ride. Spartan has the cooling center features and components that give you confidence from the road up. 4 Passive steer tag axle 5 Tire pressure monitoring system 6 Torsion control 7 20-year frame and cross-member warranty, assembled with American steel 8 Independent front suspension and race inspired shocks 9 Air brakes with suspended adjustable pedal 10 Equipped with E-Z Steer steering assist system 11 Spartan Connected Coach™ digital dash and passive keyless start Note: Some features available as optional content on specific OEM models (could vary by model year). The industry’s best chassis built, around safety and technology. Our industry-leading Spartan Advanced Protection System (APS) provides Spartan chassis owners with comprehensive safety technology that helps you avoid collisions and keeps you alert to anything that could go wrong. ▪ Spartan Safe Haul™ ▪ Collision Mitigation with Adaptive Cruise Control ▪ Electronic Stability Control E-Z Steer adapts to signals from the vehicle and analyzes driver ▪ Automatic Traction Control input to provide smoother, more precise steering, helping to ▪ Tire Pressure Monitoring System improve performance, reduce driver fatigue, and enhance the driving experience for anyone behind the wheel. Everything you need, on clear display. Spartan’s Connected Coach™ gives you a complete and intuitive digital dashboard display that you can customize to your exact wants and needs.