The Development of a Small Scale Radio Astronomy Image Synthesis Array for Research in Radio Frequency Interference Mitigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Radio and Millimeter Continuum Surveys and Their Astrophysical Implications
The Astronomy and Astrophysics Review (2011) DOI 10.1007/s00159-009-0026-0 REVIEWARTICLE Gianfranco De Zotti · Marcella Massardi · Mattia Negrello · Jasper Wall Radio and millimeter continuum surveys and their astrophysical implications Received: 13 May 2009 c Springer-Verlag 2009 Abstract We review the statistical properties of the main populations of radio sources, as emerging from radio and millimeter sky surveys. Recent determina- tions of local luminosity functions are presented and compared with earlier esti- mates still in widespread use. A number of unresolved issues are discussed. These include: the (possibly luminosity-dependent) decline of source space densities at high redshifts; the possible dichotomies between evolutionary properties of low- versus high-luminosity and of flat- versus steep-spectrum AGN-powered radio sources; and the nature of sources accounting for the upturn of source counts at sub-milli-Jansky (mJy) levels. It is shown that straightforward extrapolations of evolutionary models, accounting for both the far-IR counts and redshift distribu- tions of star-forming galaxies, match the radio source counts at flux-density levels of tens of µJy remarkably well. We consider the statistical properties of rare but physically very interesting classes of sources, such as GHz Peak Spectrum and ADAF/ADIOS sources, and radio afterglows of γ-ray bursts. We also discuss the exploitation of large-area radio surveys to investigate large-scale structure through studies of clustering and the Integrated Sachs–Wolfe effect. Finally, we briefly describe the potential of the new and forthcoming generations of radio telescopes. A compendium of source counts at different frequencies is given in Supplemen- tary Material. -

Small-Scale Anisotropies of the Cosmic Microwave Background: Experimental and Theoretical Perspectives
Small-Scale Anisotropies of the Cosmic Microwave Background: Experimental and Theoretical Perspectives Eric R. Switzer A DISSERTATION PRESENTED TO THE FACULTY OF PRINCETON UNIVERSITY IN CANDIDACY FOR THE DEGREE OF DOCTOR OF PHILOSOPHY RECOMMENDED FOR ACCEPTANCE BY THE DEPARTMENT OF PHYSICS [Adviser: Lyman Page] November 2008 c Copyright by Eric R. Switzer, 2008. All rights reserved. Abstract In this thesis, we consider both theoretical and experimental aspects of the cosmic microwave background (CMB) anisotropy for ℓ > 500. Part one addresses the process by which the universe first became neutral, its recombination history. The work described here moves closer to achiev- ing the precision needed for upcoming small-scale anisotropy experiments. Part two describes experimental work with the Atacama Cosmology Telescope (ACT), designed to measure these anisotropies, and focuses on its electronics and software, on the site stability, and on calibration and diagnostics. Cosmological recombination occurs when the universe has cooled sufficiently for neutral atomic species to form. The atomic processes in this era determine the evolution of the free electron abundance, which in turn determines the optical depth to Thomson scattering. The Thomson optical depth drops rapidly (cosmologically) as the electrons are captured. The radiation is then decoupled from the matter, and so travels almost unimpeded to us today as the CMB. Studies of the CMB provide a pristine view of this early stage of the universe (at around 300,000 years old), and the statistics of the CMB anisotropy inform a model of the universe which is precise and consistent with cosmological studies of the more recent universe from optical astronomy. -
The Very Small Array
The Very Small Array Project: VSA PI: Dr. H. Paul Shuch, Exec. Dir., The SETI League, Inc. ([email protected]) Description and Objectives: A test platform for future research-grade radio telescopes, the Very Small Array is a low-cost effort to combine the collecting area of multiple off-the-shelf backyard satellite TV dishes into a highly capable L-band observing instrument. A volunteer effort of the grassroots nonprofit SETI League, the VSA is being built in the Principal Investigator’s backyard, with member donations and modest grant funding. A US patent has been issued for our technique of employing combined analog and digital circuitry for simultaneous total power radiometry, spectroscopy, and aperture synthesis interferometry. Key Features of Instrument: Schedule Milestones: Phase 0: Paper design, single-dish test bed; § 8 ea. 1.8 meter reflectors in Mills Cross array US patent #6,593,876 (issued 2003) § Offset feeds for non-blocked aperture Phase 1: Physical Structures – (completed 2004) (masts, az/el mounts, dishes, feeds, § Meridian transit mode w/ elevation rotation conduit, junction boxes cables) § Dual Orthogonal Circular Polarizations Phase 2: Front-end electronics (in process 2005) Phase 3: Back-end electronics + DSP (planned for 2007) § Full ‘water-hole’ coverage, 1.2 – 1.7 GHz Applications: § Simultaneous total power radiometry, spec- § Meridian transit all-sky SETI survey troscopy, and interferometry in real time § Parasitic Astrophysical Survey § Targeted SETI in direction of known exoplanets Partners: § Quick-response verification of candidate SETI signals American Astronomical Society, ARRL TRL = 3 Foundation, Microcomm Consulting Revised: 12 May 2005 Keywords: Radio Telescope, Phased Array, Mills Cross, Radiometry, Spectroscopy, Interferometry, SETI. -

Download This Article in PDF Format
A&A 533, A57 (2011) Astronomy DOI: 10.1051/0004-6361/201116972 & c ESO 2011 Astrophysics High-frequency predictions for number counts and spectral properties of extragalactic radio sources. New evidence of a break at mm wavelengths in spectra of bright blazar sources M. Tucci1,L.Toffolatti2,3, G. De Zotti4,5, and E. Martínez-González6 1 LAL, Univ Paris-Sud, CNRS/IN2P3, Orsay, France e-mail: [email protected] 2 Departamento de Física, Universidad de Oviedo, c. Calvo Sotelo s/n, 33007 Oviedo, Spain 3 Research Unit associated with IFCA-CSIC, Instituto de Física de Cantabria, avda. los Castros, s/n, 39005 Santander, Spain 4 INAF – Osservatorio Astronomico di Padova, Vicolo dell’Osservatorio 5, 35122 Padova, Italy 5 International School for Advanced Studies, SISSA/ISAS, Astrophysics Sector, via Bonomea 265, 34136 Trieste, Italy 6 Instituto de Física de Cantabria, CSIC-Universidad de Cantabria, Avda. de los Castros s/n, 39005 Santander, Spain Received 28 March 2011 / Accepted 9 June 2011 ABSTRACT We present models to predict high-frequency counts of extragalactic radio sources using physically grounded recipes to describe the complex spectral behaviour of blazars that dominate the mm-wave counts at bright flux densities. We show that simple power-law spectra are ruled out by high-frequency (ν ≥ 100 GHz) data. These data also strongly constrain models featuring the spectral breaks predicted by classical physical models for the synchrotron emission produced in jets of blazars. A model dealing with blazars as a single population is, at best, only marginally consistent with data coming from current surveys at high radio frequencies. -

SETI: the Role of the Dedicated Amateur
terrestrial beings. Given that no human effort can impact this particular factor, : what can we do to maximize our chances SETI for SETI success? For a brief time (admittedly a mere eyeblink in human history), the govern- ments of planet Earth threw their prestige The Role of the and fiscal resources at the SETI problem, sponsoring any number of scientific searches. But it is amateurs who have made, and continue to make, the most sig- nificant strides toward contact. Dedicated Amateur An amateur, as defined by science and the Olympics Committee alike, is one Dr H. Paul Shuch, N6TX who strives to excel without financial compensation. The motivation of the ama- teur is revealed by the Latin root of the word: an amateur works for love. Ask any contemporary SETI scientist The Search for Extra-Terrestrial Intelligence or technologist why he or she strives against incredible odds. The answer is al- is moving forward on a number of fronts, ways the same. What modest salary he or she may draw is almost incidental. Any thanks in large part to amateurs who skilled SETIzen could always make more money by diverting the requisite effort in volunteer their time and expertise. a different direction. It is indeed for the love of the game that the best and the brightest choose to compete in the SETI Olympiad. ince its emergence as a respectable interpretation. Like the amateur scientific discipline nearly a half athlete competing in an Olympiad, the The Athletes century ago, the electromagnetic amateur SETIzen can expect to struggle Not all SETI pioneers are licensed ra- Search for Extra-Terrestrial Intelli- for survival, absent commercial or insti- dio amateurs (though those I will discuss Sgence (SETI) has been dominated by tutional sponsorship. -
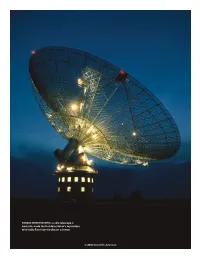
PARKES OBSERVATORY, a Radio Telescope in a Tra Ia Ma E T E Fir T
PARKES OBSERVATORY, a radio telescope in Atraiamaetefrtetectionoamterio rieraioareromteitantniere. ScientiicAmerican A S T R O N O MY Flashes ın the Nıght Astronomers are racing to fgure out what causes powerful bursts of radio light in the distant cosmos By Duncan Lorimer and Maura McLaughlin ONE DAY IN EARLY 2007 UNDERGRADUATE STUDENT DAVID NARKEVIC came to us with some news. He was a physics major at West Virginia University, where the two of us had just begun our first year as assistant professors. We had tasked him with inspecting archival observations of the Magellanic Clouds—small satellite galaxies of the Milky Way about 200,000 light-years away from Earth. Narkevic had an understated manner, and that day was no exception. “I’ve found something that looks quite interesting,” he said nonchalantly, holding up a graph of a signal that was more than 100 times stronger than the background hiss of the telescope electronics. At first, it seemed that he had identified just what we were looking for: a very small, bright type of star known as a pulsar. IN BRIEF Getty Images Getty A strange burst of radio light from Astronomers doubted tht the sh A quest is on to discover more of Theories include compact stars, the distnt cosmos mstied scien- was celestial until they found similar these strange bursts and identify super novae and even exotic possibili- B. GOODMAN GOODMAN B. tists when they spotted it in 2007. blasts, dubbed “fast radio bursts.” what causes them. ties such as cosmic strings. ROBERT April 2018, ScientificAmerican.com 43 ScientiicAmerican These dense, magnetic stars shoot out light in beams that Duncan Lorimer is a professor of physics and astronomy sweep around as they rotate, making the star appear to “pulse” at West Virginia University’s Center for Gravitational Waves on and of like a lighthouse. -

The Transient Radio Sky Observed with the Parkes Radio Telescope
The transient radio sky observed with the Parkes radio telescope Emily Brook Petroff Presented in fulfillment of the requirements of the degree of Doctor of Philosophy February, 2016 Faculty of Science, Engineering, and Technology Swinburne University i Toute la sagesse humaine sera dans ces deux mots: attendre et espérer. All of human wisdom is summed up in these two words: wait and hope. —The Count of Monte Cristo, Aléxandre Dumas ii Abstract This thesis focuses on the study of time-variable phenomena relating to pulsars and fast radio bursts (FRBs). Pulsars are rapidly rotating neutron stars that produce radio emission at their magnetic poles and are observed throughout the Galaxy. The source of FRBs remains a mystery – their high dispersion measures may imply an extragalactic and possibly cosmological origin; however, their progenitor sources and distances have yet to be verified. We first present the results of a 6-year study of 168 young pulsars to search for changes in the electron density along the line of sight through temporal variations in the pulsar dispersion measure. Only four pulsars exhibited detectable variations over the period of the study; it is argued that these variations are due to the movement of ionized material local to the pulsar. Our upper limits on DM variations in the other pulsars are consistent with the scattering predicted by current models of turbulence in the free electron density along these lines of sight through the interstellar medium (ISM). We also present new results of a search for single pulses from Fast Radio Bursts (FRBs), including a full analysis of the data from the High Time Resolution Universe (HTRU) sur- vey at intermediate and high Galactic latitudes. -

Task Force on Cosmic Microwave Background Research
Task Force On Cosmic Microwave Background Research Final Report July 11, 2005 -1- MEMBERS OF THE CMB TASK FORCE James Bock Caltech/JPL Sarah Church Stanford University Mark Devlin University of Pennsylvania Gary Hinshaw NASA/GSFC Andrew Lange Caltech Adrian Lee University of California at Berkeley/LBNL Lyman Page Princeton University Bruce Partridge Haverford College John Ruhl Case Western Reserve University Max Tegmark Massachusetts Institute of Technology Peter Timbie University of Wisconsin Rainer Weiss (chair) Massachusetts Institute of Technology Bruce Winstein University of Chicago Matias Zaldarriaga Harvard University AGENCY OBSERVERS Beverly Berger National Science Foundation Vladimir Papitashvili National Science Foundation Michael Salamon NASA/HDQTS Nigel Sharp National Science Foundation Kathy Turner US Department of Energy -2- Table of Contents Executive Summary ...........................................................................................4 1 Outline of Report ................................................................................................8 sidebar “Some History and Perspective..............................................................10 2 Cosmology and Inflation ..................................................................................11 sidebar “Direct Measurement of Primeval Gravitational Waves” ....................18 3 Theory of CMB Polarization and Gravitational Waves ....................................19 4 Astrophysical Disturbances in Measuring the CMB Polarization: Gravitational -

CMB Interferometry Clive Dickinson
CMB interferometry Clive Dickinson∗† Jodrell Bank Centre for Astrophysics, Alan Turing Building, School of Physics & Astronomy, The University of Manchester, Oxford Road, Manchester, M13 9PL, U.K. E-mail: [email protected] Interferometry has been a very successful tool for measuring anisotropies in the cosmic mi- crowave background. Interferometers provided the first constraints on CMB anisotropies on small angular scales (ℓ ∼ 10000) in the 1980s and then in the late 1990s and early 2000s made ground- breaking measurements of the CMB power spectrum at intermediate and small angular scales covering the ℓ-range ≈ 100–4000. In 2002 the DASI made the first detection of CMB polariza- tion which remains a major goal for current and future CMB experiments. Interferometers have also made major contributions to the detection and surveying of the Sunyaev-Zel’dovich (SZ) effect in galaxy clusters. In this short review I cover the key aspects that made interferometry well-suited to CMB measure- ments and summarise some of the central observations that have been made. I look to the future and in particular to HI intensity mapping at high redshifts that could make use of the advantages of interferometry. arXiv:1212.1729v1 [astro-ph.CO] 7 Dec 2012 Resolving the Sky - Radio Interferometry: Past, Present and Future -RTS2012 April 17-20, 2012 Manchester, UK ∗Speaker. †CD acknowledges an STFC Advanced Fellowship and an EU Marie Curie IRG grant under the FP7. c Copyright owned by the author(s) under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike Licence. http://pos.sissa.it/ CMB interferometry Clive Dickinson Contents 1. -

Fast Radio Bursts
The Astronomy and Astrophysics Review (2019) 27:4 https://doi.org/10.1007/s00159-019-0116-6 REVIEW ARTICLE Fast radio bursts E. Petroff1,2 · J. W. T. Hessels1,2 · D. R. Lorimer3,4 Received: 30 November 2018 © The Author(s) 2019 Abstract The discovery of radio pulsars over a half century ago was a seminal moment in astron- omy. It demonstrated the existence of neutron stars, gave a powerful observational tool to study them, and has allowed us to probe strong gravity, dense matter, and the inter- stellar medium. More recently, pulsar surveys have led to the serendipitous discovery of fast radio bursts (FRBs). While FRBs appear similar to the individual pulses from pulsars, their large dispersive delays suggest that they originate from far outside the Milky Way and hence are many orders-of-magnitude more luminous. While most FRBs appear to be one-off, perhaps cataclysmic events, two sources are now known to repeat and thus clearly have a longer lived central engine. Beyond understanding how they are created, there is also the prospect of using FRBs—as with pulsars—to probe the extremes of the Universe as well as the otherwise invisible intervening medium. Such studies will be aided by the high-implied all-sky event rate: there is a detectable FRB roughly once every minute occurring somewhere on the sky. The fact that less than a hundred FRB sources have been discovered in the last decade is largely due to the small fields-of-view of current radio telescopes. A new generation of wide-field instru- ments is now coming online, however, and these will be capable of detecting multiple FRBs per day. -

RESEARCH FACILITIES for the SCIENTIFIC COMMUNITY
NATIONAL RADIO ASTRONOMY OBSERVATORY RESEARCH FACILITIES for the SCIENTIFIC COMMUNITY 2017 Atacama Large Millimeter/submillimeter Array Karl G. Jansky Very Large Array CONTENTS RESEARCH FACILITIES 2017 NRAO Overview . 1 Atacama Large Millimeter/submillimeter Array (ALMA) . 2 Karl G. Jansky Very Large Array (VLA) . .6 Central Development Laboratory (CDL) . .10 Student & Visitor Programs . .12 (above image) VLA images of HL Tau (yellow) combined with ALMA image (red) reveal a distinct clump of dust in the inner region of the disk. Researchers believe this clump represents the earliest stage in the formation of protoplanets. Credit: Carrasco-Gonzalez, et al.; Bill Saxton, NRAO/ AUI/NSF (cover) An artist’s interpretation of the inner few tens of astronomical units (AUs) around a proto- planetary disk similar to HL Tauri, where ALMA has revealed the rings in 1.3 mm dust continuum emission likely created by Saturn-mass planets orbiting the central star. Detecting planets in the terrestrial planet forming region (1-10 AU) requires longer wavelength observations and higher angular resolution than available with ALMA. Jansky VLA observations map the 7mm emission from the innermost and densest disk region probing the distribution of pebbles at a spatial resolution of 10 AU. Owing to its unprecedented angular resolution at millimeter and centimeter wavelengths, the ngVLA will peer into the innermost and highly obscured dusty regions not accessible by ALMA and the VLA. The ngVLA will reveal the presence of planets with masses as small as a few Earth masses on spatial scales as small as 1 AU. Credit: A. Angelich, B. Saxton, C. Brogan; NRAO/AUI/NSF; ALMA (ESO/NRAO/NAOJ) (back cover) Spectacular jets powered by the gravitational energy of a supermassive black hole in the core of the elliptical galaxy Hercules A illustrate the combined imaging power of two of astronomy’s cutting-edge tools, the Hubble Space Telescope’s Wide Field Camera 3, and the recently upgraded Karl G. -

Alimentadores Planos De Gran Ancho De Banda Con ´Enfasis En Detecci
Alimentadores planos de gran ancho de banda con enfasis´ en deteccion´ de polarizacion´ para radioastronom´ıa en microondas Por M. en C. Edgar Col´ın Beltran´ Presentado como requisito parcial para la obtencion´ del grado de: DOCTOR EN CIENCIAS EN LA ESPECIALIDAD DE ASTROFISICA´ en el Instituto Nacional de Astrof´ısica, Optica´ y Electronica´ Febrero 2013 Tonantzintla, Puebla Supervisada por: Dr. Alonso Corona Chavez´ Investigador Titular Departamento de Electronica´ INAOE Dr. Jose´ Eduardo Mendoza Torres Investigador Titular Departamento de Astrof´ısica INAOE c INAOE 2013 El autor otorga al INAOE el permiso de reproducir copias totales o parciales de esta tesis. Resumen La radioastronomía actual necesita de la mayor cantidad de datos y con el menor ruido para su desarrollo. En este trabajo se proponen dos alimentadores en tecnología de circuito impreso que cumplen con los objetivos anteriores. La tesis está organizada de la siguiente manera; en el primer capítulo se contextualiza el estado actual de los alimentadores que se encuentran en radiotelescopios importantes del mundo, para entender las necesidades y limitaciones actuales. El segundo capítulo es una breve pero importante introducción a ingeniería de microondas, que es el rango donde se sitúan las propuestas. Posteriormente se trata sobre teoría básica de antenas y el balance de un enlace que servirá como base de los capítulos posteriores. El capítulo cuarto es una descripción de los mecanismos de emisión que se presenta en el sol para el rango de microondas y que es importante porque se usará como objeto de observación en el sexto capítulo. Los siguientes dos capítulos, el quinto y sexto, son las propuestas que se han desarrollado para cubrir las necesidades descritas en el capítulo uno y con base en la teoría de los demás.