Lion, Wildebeest and Zebra: a Predator–Prey Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Age Determination of the Mongolian Wild Ass (Equus Hemionus Pallas, 1775) by the Dentition Patterns and Annual Lines in the Tooth Cementum
Journal of Species Research 2(1):85-90, 2013 Age determination of the Mongolian wild ass (Equus hemionus Pallas, 1775) by the dentition patterns and annual lines in the tooth cementum Davaa Lkhagvasuren1,*, Hermann Ansorge2, Ravchig Samiya1, Renate Schafberg3, Anne Stubbe4 and Michael Stubbe4 1Department of Ecology, School of Biology and Biotechnology, National University of Mongolia, PO-Box 377 Ulaanbaatar 210646 2Senckenberg Museum of Natural History, Goerlitz, PF 300154 D-02806 Goerlitz, Germany 3Institut für Agrar- und Ernährungswissenschaften, Professur fuer Tierzucht, MLU, Museum für Haustierkunde, Julius Kuehn-ZNS der MLU, Domplatz 4, D-06099 Halle/Saale, Germany 4Institute of Zoology, Martin-Luther University of Halle Wittenberg, Domplatz 4, D-06099 Halle/Saale, Germany *Correspondent: [email protected] Based on 440 skulls recently collected from two areas of the wild ass population in Mongolia, the time course of tooth eruption and replacement was investigated. The dentition pattern allows identification of age up to five years. We also conclude that annual lines in the tooth cementum can be used to determine the age in years for wild asses older than five years after longitudinal tooth sections were made with a low- speed precision saw. The first upper incisor proved to be most suitable for age determination, although the starting time of cement deposition is different between the labial and lingual sides of the tooth. The accurate age of the wild ass can be determined from the number of annual lines and the time before the first forma- tion of the cementum at the respective side of the tooth. Keywords: age determination, annual lines, dentition, Equus hemionus, Mongolia, Mongolian wild ass, tooth cementum �2013 National Institute of Biological Resources DOI: 10.12651/JSR.2013.2.1.085 ence of poaching on the population size and population INTRODUCTION structure. -

Water Use of Asiatic Wild Asses in the Mongolian Gobi Petra Kaczensky University of Veterinary Medicine, [email protected]
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Erforschung biologischer Ressourcen der Mongolei Institut für Biologie der Martin-Luther-Universität / Exploration into the Biological Resources of Halle-Wittenberg Mongolia, ISSN 0440-1298 2010 Water Use of Asiatic Wild Asses in the Mongolian Gobi Petra Kaczensky University of Veterinary Medicine, [email protected] V. Dresley University of Freiburg D. Vetter University of Freiburg H. Otgonbayar National University of Mongolia C. Walzer University of Veterinary Medicine Follow this and additional works at: http://digitalcommons.unl.edu/biolmongol Part of the Asian Studies Commons, Biodiversity Commons, Desert Ecology Commons, Environmental Sciences Commons, Nature and Society Relations Commons, Other Animal Sciences Commons, and the Zoology Commons Kaczensky, Petra; Dresley, V.; Vetter, D.; Otgonbayar, H.; and Walzer, C., "Water Use of Asiatic Wild Asses in the Mongolian Gobi" (2010). Erforschung biologischer Ressourcen der Mongolei / Exploration into the Biological Resources of Mongolia, ISSN 0440-1298. 56. http://digitalcommons.unl.edu/biolmongol/56 This Article is brought to you for free and open access by the Institut für Biologie der Martin-Luther-Universität Halle-Wittenberg at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Erforschung biologischer Ressourcen der Mongolei / Exploration into the Biological Resources of Mongolia, ISSN 0440-1298 by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Copyright 2010, Martin-Luther-Universität Halle Wittenberg, Halle (Saale). Used by permission. Erforsch. biol. Ress. Mongolei (Halle/Saale) 2010 (11): 291-298 Water use of Asiatic wild asses in the Mongolian Gobi P. Kaczensky, V. Dresley, D. Vetter, H. Otgonbayar & C. Walzer Abstract Water is a key resource for most large bodied mammals in the world’s arid areas. -

Zebra and Quagga Mussels
SPECIES AT A GLANCE Zebra and Quagga Mussels Two tiny mussels, the zebra mussel (Dreissena poly- morpha) and the quagga mussel (Dreissena rostriformis bugensis), are causing big problems for the economy and the environment in the west. Colonies of millions of mussels can clog underwater infrastructure, costing Zebra mussel (Actual size is 1.5 cm) taxpayers millions of dollars, and can strip nutrients from nearly all the water in a lake in a single day, turning entire ecosystems upside down. Zebra and quagga mussels are already well established in the Great Lakes and Missis- sippi Basin and are beginning to invade Western states. It Quagga mussel takes only one contaminated boat to introduce zebra and (Actual size is 2 cm) quagga mussels into a new watershed; once they have Amy Benson, U.S. Geological Survey Geological Benson, U.S. Amy been introduced, they are virtually impossible to control. REPORT THIS SPECIES! Oregon: 1-866-INVADER or Oregon InvasivesHotline.org; Washington: 1-888-WDFW-AIS; California: 1-916- 651-8797 or email [email protected]; Other states: 1-877-STOP-ANS. Species in the news Learning extensions Resources Oregon Public Broadcasting’s Like a Mussel out of Water Invasion of the Quagga Mussels! slide coverage of quagga mussels: www. show: waterbase.uwm.edu/media/ opb.org/programs/ofg/episodes/ cruise/invasion_files/frame.html view/1901 (Only viewable with Microsoft Internet Explorer) Why you should care How they got here and spread These tiny invaders have dramatically changed Zebra and quagga mussels were introduced to the entire ecosystems, and they cost taxpayers billions Great Lakes from the Caspian and Black Sea region of dollars every year. -

Sacramento Zoo Reports the Death of Geriatric Grevy's Zebra
Sacramento Zoo Reports the Death of Geriatric Grevy’s Zebra WHAT’S HAPPENING: The Sacramento Zoo is mourning the loss of Akina, a geriatric female Grevy’s Zebra. WHEN: Akina passed away the evening of Thursday, December 29 at the age of 24. On December 28, Akina was behaving abnormally and was placed under veterinary observation and treatment for suspected colic. Colic is a relatively common, but serious, disorder of the digestive system. The next day, after her conditioned failed to improve, Akina was brought to the Sacramento Zoo’s veterinary clinic where she received a full exam. During the exam, Akina was given fluids, pain medications, antibiotics, intestinal protectants and mineral oil to assist with resolving the colic. Over the course of the afternoon Akina was slow to recover from the exam and unfortunately died at the end of the day. Akina was taken to UC Davis for a full necropsy. Born in 1992, Akina was the second oldest Zebra at the Sacramento Zoo, and one of the oldest Grevy’s Zebras living at an Association of Zoos and Aquariums-accredited institution – the oldest being 27 years-of-age. “Akina was a Grand Old Equine who was never shy about chatting,” said Lindsey Moseanko, Primary Ungulate Keeper at the Sacramento Zoo. “Her vocalizing could be heard throughout the zoo. She loved coming to her keepers at the fence-line for apple slices and ear scratches,” she continued. “Her spunky personality will be missed.” The Sacramento Zoo participates in the Association of Zoos and Aquariums’ Grevy’s Zebra Species Survival Plan®. -

Zebra & Quagga Mussel Fact Sheet
ZEBRA & QUAGGA MUSSELQuagga Mussel (Dreissena rostriformis bugensis) FACT SHEET Zebra Mussel (Dreissena polymorpha) ZEBRA AND QUAGGA MUSSELS These freshwater bivalves are native to the Black the Great Lakes in the late 1980s, by trans-Atlantic Sea region of Eurasia. They were first introduced to ships discharging ballast water that contained adult or larval mussels. They spread widely and as of 2019, can be found in Ontario, Quebec and Manitoba. They are now established in at least Alberta24 American or the states. north. Quagga and zebra mussels have not yet been detected in BC, Saskatchewan, IDENTIFICATION Zebra and quagga mussels—or dreissenid mussels— look very similar, but quagga mussels are slightly larger, rounder, and wider than zebra mussels. Both species range in colour from black, cream, or white with varying amounts of banding. Both mussels also possess byssal threads, strong fibers that allow the mussel to attach itself to hard surfaces—these are lacking in native freshwater mussels. There are other bivalve species found within BC (see table on reverse). waters to be distinguished from zebra and quagga IMPACTS ECOLOGICALmussels CHARACTERISTICS Ecological: Once established, invasive dreissenids are nearly impossible to fully eradicate from a water body. Habitat: Zebra and quagga mussels pose Currently, there are very limited tools available to a serious threat to the biodiversity of aquatic attempt to control or eradicate dreissenid mussels Zebra mussels can be found in the near ecosystems, competing for resources with native from natural systems without causing harm to shore area out to a depth of 110 metres, while species like phytoplankton and zooplankton, which other wildlife, including salmonids. -

Speciation with Gene Flow in Equids Despite Extensive Chromosomal Plasticity
Speciation with gene flow in equids despite extensive chromosomal plasticity Hákon Jónssona,1, Mikkel Schuberta,1, Andaine Seguin-Orlandoa,b,1, Aurélien Ginolhaca, Lillian Petersenb, Matteo Fumagallic,d, Anders Albrechtsene, Bent Petersenf, Thorfinn S. Korneliussena, Julia T. Vilstrupa, Teri Learg, Jennifer Leigh Mykag, Judith Lundquistg, Donald C. Millerh, Ahmed H. Alfarhani, Saleh A. Alquraishii, Khaled A. S. Al-Rasheidi, Julia Stagegaardj, Günter Straussk, Mads Frost Bertelsenl, Thomas Sicheritz-Pontenf, Douglas F. Antczakh, Ernest Baileyg, Rasmus Nielsenc, Eske Willersleva, and Ludovic Orlandoa,2 aCentre for GeoGenetics, Natural History Museum of Denmark, University of Copenhagen, DK-1350 Copenhagen K, Denmark; bNational High-Throughput DNA Sequencing Center, DK-1353 Copenhagen K, Denmark; cDepartment of Integrative Biology, University of California, Berkeley, CA 94720; dUCL Genetics Institute, Department of Genetics, Evolution, and Environment, University College London, London WC1E 6BT, United Kingdom; eThe Bioinformatics Centre, Department of Biology, University of Copenhagen, DK-2200 Copenhagen N, Denmark; fCentre for Biological Sequence Analysis, Department of Systems Biology, Technical University of Denmark, DK-2800 Lyngby, Denmark; gMaxwell H. Gluck Equine Research Center, Veterinary Science Department, University of Kentucky, Lexington, KY 40546; hBaker Institute for Animal Health, College of Veterinary Medicine, Cornell University, Ithaca, NY 14853; iZoology Department, College of Science, King Saud University, Riyadh 11451, Saudi Arabia; jRee Park, Ebeltoft Safari, DK-8400 Ebeltoft, Denmark; kTierpark Berlin-Friedrichsfelde, 10319 Berlin, Germany; and lCentre for Zoo and Wild Animal Health, Copenhagen Zoo, DK-2000 Frederiksberg, Denmark Edited by Andrew G. Clark, Cornell University, Ithaca, NY, and approved October 27, 2014 (received for review July 3, 2014) Horses, asses, and zebras belong to a single genus, Equus,which Conservation of Nature. -

(EHV-1 and EHV-9): Genetic Diversity, Latency and Co-Infections
viruses Article Zebra Alphaherpesviruses (EHV-1 and EHV-9): Genetic Diversity, Latency and Co-Infections Azza Abdelgawad 1, Armando Damiani 2, Simon Y. W. Ho 3, Günter Strauss 4, Claudia A. Szentiks 1, Marion L. East 1, Nikolaus Osterrieder 2 and Alex D. Greenwood 1,5,* 1 Leibniz-Institute for Zoo and Wildlife Research, Alfred-Kowalke-Strasse 17, Berlin 10315, Germany; [email protected] (A.A.); [email protected] (C.A.S.); [email protected] (M.L.E.) 2 Institut für Virologie, Freie Universität Berlin, Robert-von-Ostertag-Str. 7-13, Berlin 14163, Germany; [email protected] (A.D.); [email protected] (N.O.) 3 School of Life and Environmental Sciences, University of Sydney, Sydney, NSW 2006, Australia; [email protected] 4 Tierpark Berlin-Friedrichsfelde, Am Tierpark 125, Berlin 10307, Germany; [email protected] 5 Department of Veterinary Medicine, Freie Universität Berlin, Oertzenweg 19, Berlin 14163, Germany * Correspondence: [email protected]; Tel.: +49-30-516-8255 Academic Editor: Joanna Parish Received: 21 July 2016; Accepted: 14 September 2016; Published: 20 September 2016 Abstract: Alphaherpesviruses are highly prevalent in equine populations and co-infections with more than one of these viruses’ strains frequently diagnosed. Lytic replication and latency with subsequent reactivation, along with new episodes of disease, can be influenced by genetic diversity generated by spontaneous mutation and recombination. Latency enhances virus survival by providing an epidemiological strategy for long-term maintenance of divergent strains in animal populations. The alphaherpesviruses equine herpesvirus 1 (EHV-1) and 9 (EHV-9) have recently been shown to cross species barriers, including a recombinant EHV-1 observed in fatal infections of a polar bear and Asian rhinoceros. -
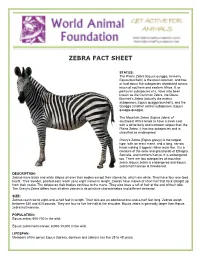
Zebra Fact Sheet
ZEBRA FACT SHEET STATUS: The Plains Zebra (Equus quagga, formerly Equus burchelli) is the most common, and has or had about five subspecies distributed across much of southern and eastern Africa. It, or particular subspecies of it, have also been known as the Common Zebra, the Dauw, Burchell's Zebra (actually the extinct subspecies, Equus quagga burchelli), and the Quagga (another extinct subspecies, Equus quagga quagga). The Mountain Zebra (Equus zebra) of southwest Africa tends to have a sleek coat with a white belly and narrower stripes than the Plains Zebra. It has two subspecies and is classified as endangered. Grevy's Zebra (Equus grevyi) is the largest type, with an erect mane, and a long, narrow head making it appear rather mule like. It is a creature of the semi arid grasslands of Ethiopia, Somalia, and northern Kenya. It is endangered too. There are two subspecies of mountain zebra. Equus zebra is endangered and Equus zebra hartmannae is threatened. DESCRIPTION: Zebras have black and white stripes all over their bodies except their stomachs, which are white. They have four one-toed hoofs. Their slender, pointed ears reach up to eight inches in length. Zebras have manes of short hair that stick straight up from their necks. The stripes on their bodies continue to the mane. They also have a tuft of hair at the end of their tails. The Grevy's Zebra differs from all other zebras in its primitive characteristics and different behavior. SIZE: Zebras reach six to eight-and-a-half feet in length. Their tails are an additional one-and-a-half feet long. -

Communal Hunting and Pack Size in African Wild Dogs, Lycaon Pictus
A&?z. Behav., 1995, 50, 1325-1339 Communal hunting and pack size in African wild dogs, Lycaon pictus SCOTT CREEL*? & NANCY MARUSHA CREEL* *Selous Wild Dog Project, Frankfurt Zoological Society, Tanzania TField Research Center for Ecology and Ethology, Rockefeller University (Received 17 May 1994; initial acceptance 28 August 1994; final acceptance I4 March 1995; MS. number: ~7007) Abstract. African wild dogs are 20-25 kg social carnivores whose major prey are ungulates ranging from 15 to 200 kg. In the Selous Game Reserve, Tanzania, wild dog pack size ranged from three to 20 adults (3-44 including yearlings and pups). Data from 905 hunts and 404 kills showed that hunting success,prey mass and the probability of multiple kills increased with number of adults. Chase distance decreasedwith number of adults. None the less, the distribution of per capita food intake across adult pack size was U-shaped, with a minimum close to the modal pack size. A similar result has been used to conclude that cooperative hunting does not favour sociality in lions (Packer et al. 1990, Am. Nat., 136, l-19), and to argue that cooperative hunting is not responsible for group living in any carnivore (Car0 1994, Cheetahs of the Serengeti Plains: Group Living in an Asocial Species). Daily per capita food intake only accounts for variation in the benefits to cooperative hunting, ignoring variation in costs. For Selouswild dogs, per capita food intake per km chased peaked close to the modal adult pack size (where per capita food intake per day was near its minimum). Thus, the energetics of cooperative hunting favour sociality in Selous wild dogs. -

How Zebras Got Their Stripes
How Zebras got Their Stripes By Addison Yang Long long ago donkeys thought horses were more beautiful than them.The horses knew donkeys were jealous,so they brag and brag to the donkeys .Donkeys got even more jealous about their look between the horses it doesn’t matter who's prettier. http://www.lovelongears.com/COLpinkMini.jpg The mean creatures kept bragging about their long blonde tail that was as soft as a blanket.Also cute little horse shoes that looked like baby’s shoes.Donkeys thought how ugly they were about their brown fur that looked like poop on their fur and about their brownish yellowish tails that 1 looked like a blob.The donkeys are sad that they can’t even wear a shoe they have to walk with bare foot. A moment later the back riding creatures tried to jump in the white paint travellers dropped on the hard sand brick road at the grass fields. nowhttps://www.google.com/url?sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0ahUKEwiYwdWsw4_QAhVm6 oMKHREwDu4QjRwIBw&url=https%3A%2F%2Fmissdouglassafrica.wordpress.com%2F2013%2F07%2F14%2Fanimals-and-other- beautiful-sights%2F&psig=AFQjCNG6lU_E5f-oVVrs1dcBTBDnbPJJCg&ust=1478363422348312 Once they got all white one of donkey cried “Now we can’t camouflage to hide from predators,so how are we suppose to live our life if we might die!’ In the blink in an eye a donkey found a nice still cool pond he said “Let's pour water on us in stripes so we can have water fall down in stripes to have white and brown stripes.’They all thought and all yelled “Thats a great idea!’All of the donkeys got stripes of brown and white and screamed “How do people see us now if we can camouflage into the grass very well?’ 2 All the sudden travellers pass by again like there doing something.Once they pass by oil falls in a straight line because the travellers traveled in a straight line for the oil to fall straight onto the sand brick road.Donkeys thought are they trying to help us……. -

Quagga Mussel (Dreissena Bugensis)
Zebra Mussel (Dreissena polymorpha) Quagga Mussel (Dreissena bugensis) What are they & where are they found? The Zebra mussel and its clammy cousin the quagga mussel are small freshwater bivalve mollusks named after their distinct zebra‐like stripes. They can be found in freshwater rivers, lakes, reservoirs and brackish water habitats. FACT: Quagga mussels were named after the “Quagga”, an extinct relative of the zebra. (http://en.wikipedia.org/wiki/Quagga) What do they look like? These revolting relatives are frequently mistaken for one another due to their similar appearance and habitat preferences. Like their namesakes, both zebra and quagga mussels have alternating dark (brown, black, or green) and light (yellow, white, or cream) banding on their shells. However, color patterns vary widely between individuals of both species. Shell stripes may be bold, faint, horizontal, vertical or absent from the mussel all together – talk about phenotypic plasticity! Both mussels are relatively small (< 1.5 inches) and generally D‐ shaped. Quagga mussels have a rounded appearance, with a convex ventral (hinge) surface, and two asymmetrical shell halves that meet to form a curved line. Zebra mussels have a more triangular shaped appearance, with a flat ventral surface, and two symmetrical shell halves that meet to form a straight line. Zebra and quagga mussels are relatively short‐lived species (2‐5 years), but they more than make up for this attribute by being extremely prolific breeders. Adult females of both species can produce 30,000 to 1 million eggs per year. Microscopic planktonic larvae, called veligers, float freely in the water column for 2‐5 weeks before settling onto a suitable substrate to feed and mature. -
Grevy's Zebra Strategy 2012-2016
CONSERVATION & MANAGEMENT STRATEGY for GREVY’S ZEBRA (Equus grevyi) in KENYA (2012-2016) 2nd Edition © jameswarwick.co.uk CONSERVATION and MANAGEMENT STRATEGY for GREVY’S ZEBRA (Equus grevyi) in KENYA (2012-2016) 2nd Edition, 2012 Produced at the Grevy’s Zebra National Stakeholders Workshop held from 24th to 26th April 2012 at the Sportsman’s Arms Hotel, Nanyuki, Kenya Compiled by: The National Grevy’s Zebra Technical Committee Front and back photos credit: © jameswarwick.co.uk Citation: KWS (2012) Conservation and Management Strategy for Grevy’s Zebra (Equus grevyi) in Kenya, (2012-2016), 2nd edition. pp.40, Kenya Wildlife Service, Nairobi, Kenya Copyright: Kenya Wildlife Service; P. O. Box 40241 – 00100 Nairobi Kenya. Email: [email protected] Table of Contents Acknowledgments 4 Abbreviations and Acronyms 5 Foreword by the Chairman of the Board of Trustees of KWS 6 Preface by the Director of KWS 7 Executive Summary 8 Introduction 9 Conservation Status 9 Numbers and Distribution of Grevy’s Zebra in Kenya and Ethiopia 9 Threats 12 Grevy’s Zebra Conservation Efforts in Kenya 14 Approach to the Revised Strategy 15 Formulation Process of this Strategic Plan and Evaluation of Previous Strategic Plan 15 Strategic Vision and Goal 17 Vision 17 Goal 17 Strategic Objectives 18 SO - 1: Coordination of the Implementation of the Conservation and Management Strategy 18 SO - 2: Enhancement of Stakeholder Partnerships in Grevy’s Zebra Conservation 20 SO - 3: Enhancement of Grevy’s Zebra Conservation and Habitat Management 23 SO - 4: Establish a Programme