Mathematical Research with Technology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 6 the Arbelos
Chapter 6 The arbelos 6.1 Archimedes’ theorems on the arbelos Theorem 6.1 (Archimedes 1). The two circles touching CP on different sides and AC CB each touching two of the semicircles have equal diameters AB· . P W1 W2 A O1 O C O2 B A O1 O C O2 B Theorem 6.2 (Archimedes 2). The diameter of the circle tangent to all three semi- circles is AC CB AB · · . AC2 + AC CB + CB2 · We shall consider Theorem ?? in ?? later, and for now examine Archimedes’ wonderful proofs of the more remarkable§ Theorems 6.1 and 6.2. By synthetic reasoning, he computed the radii of these circles. 1Book of Lemmas, Proposition 5. 2Book of Lemmas, Proposition 6. 602 The arbelos 6.1.1 Archimedes’ proof of the twin circles theorem In the beginning of the Book of Lemmas, Archimedes has established a basic proposition 3 on parallel diameters of two tangent circles. If two circles are tangent to each other (internally or externally) at a point P , and if AB, XY are two parallel diameters of the circles, then the lines AX and BY intersect at P . D F I W1 E H W2 G A O C B Figure 6.1: Consider the circle tangent to CP at E, and to the semicircle on AC at G, to that on AB at F . If EH is the diameter through E, then AH and BE intersect at F . Also, AE and CH intersect at G. Let I be the intersection of AE with the outer semicircle. Extend AF and BI to intersect at D. -

International Journal of Division by Zero Calculus Vol. 1 (January-December, 2021)
International Journal of Division by Zero Calculus Vol. 1 (January-December, 2021) GEOMETRY AND DIVISION BY ZERO CALCULUS HIROSHI OKUMURA Abstract. We demonstrate several results in plane geometry derived from division by zero and division by zero calculus. The results show that the two new concepts open an entirely new world of mathematics. 1. Introduction The lack of division by zero has been a serious glaring omission in our mathe- matics. While recent publications [3], [7], [8], [22], [29] have offered a final solution to this [3]: z = 0 for any element z in a field: (1.1) 0 In this article we show several results in plane geometry obtained from division by zero given by (1.1) and division by zero calculus, which is a generalization of division by zero. For a meromorphic function W = f(z), we consider the Laurent expansion of f around z = a: nX=−1 X1 n n W = f(z) = Cn(z − a) + C0 + Cn(z − a) : n=−∞ n=1 Then we define f(a) = C0. This is a generalization of (1.1) called division by zero calculus [29]. Now we can consider the value f(a) = C0 at an isolated singular point a. We consider some families of circles in the plane, each of the members is rep- resented by a Cartesian equation fz(x; y) = 0 with parameter z 2 R. Here, we assume that if x and y are fixed, fz(x; y) is a meromorphic function in z. Then, for the Laurent expansion of the function fz(x; y) at z = a for fixed x; y, the corresponding coefficient Cn(a; x; y) is depending on also x and y. -

TME Volume 7, Numbers 2 and 3
The Mathematics Enthusiast Volume 7 Number 2 Numbers 2 & 3 Article 21 7-2010 TME Volume 7, Numbers 2 and 3 Follow this and additional works at: https://scholarworks.umt.edu/tme Part of the Mathematics Commons Let us know how access to this document benefits ou.y Recommended Citation (2010) "TME Volume 7, Numbers 2 and 3," The Mathematics Enthusiast: Vol. 7 : No. 2 , Article 21. Available at: https://scholarworks.umt.edu/tme/vol7/iss2/21 This Full Volume is brought to you for free and open access by ScholarWorks at University of Montana. It has been accepted for inclusion in The Mathematics Enthusiast by an authorized editor of ScholarWorks at University of Montana. For more information, please contact [email protected]. The Montana Mathematics Enthusiast ISSN 1551-3440 VOL. 7, NOS 2&3, JULY 2010, pp.175-462 Editor-in-Chief Bharath Sriraman, The University of Montana Associate Editors: Lyn D. English, Queensland University of Technology, Australia Simon Goodchild, University of Agder, Norway Brian Greer, Portland State University, USA Luis Moreno-Armella, Cinvestav-IPN, México International Editorial Advisory Board Mehdi Alaeiyan, Iran University of Science and Technology, Iran Miriam Amit, Ben-Gurion University of the Negev, Israel Ziya Argun, Gazi University, Turkey Ahmet Arikan, Gazi University, Turkey. Astrid Beckmann, University of Education, Schwäbisch Gmünd, Germany Raymond Bjuland, University of Stavanger, Norway Morten Blomhøj, Roskilde University, Denmark Robert Carson, Montana State University- Bozeman, USA Mohan Chinnappan, -

Archimedean Circles Induced by Skewed Arbeloi
Journal for Geometry and Graphics Volume 16 (2012), No. 1, 13–17. Archimedean Circles Induced by Skewed Arbeloi Ryuichi¯ Nakajima1, Hiroshi Okumura2 1318-1 Goryo¯ Matsuida, Annaka Gunma 379-0302, Japan 2251 Moo 15 Ban Kesorn, Tambol Sila, Amphur Muang Khonkaen 40000, Thailand emails: [email protected], [email protected] Abstract. Infinite Archimedean circles touching one of the inner circles of the arbelos are induced by skewed arbeloi. Key Words: arbelos, skewed arbelos, infinite Archimedean circles MSC 2010: 51M04 1. Introduction On the problem to find infinite Archimedean circles of the arbelos, the following four have priority to be considered: (P1) to find infinite Archimedean circles touching the outer circle of the arbelos, (P2) to find infinite Archimedean circles passing through the tangent point of the two inner circles, (P3) to find infinite Archimedean circles touching the radical axis of the inner circles, and (P4) to find infinite Archimedean circles touching one of the inner circles. Solutions of (P1), (P2) and (P3) are given in [4], [6] and [2], respectively. But no solutions can be found for (P4). In this note we give a solution of this problem. Let O be a point on a segment AB and α, β and γ be the circles with diameters OA, OB and AB, respectively. We show that infinite Archimedean circles of the arbelos formed by the circles α, β and γ can be obtained by considering arbitrary circles touching α and β at points different from O. Let a and b be the respective radii of the circles α and β. -

Magic Circles in the Arbelos
The Mathematics Enthusiast Volume 7 Number 2 Numbers 2 & 3 Article 3 7-2010 Magic Circles in the Arbelos Christer Bergsten Follow this and additional works at: https://scholarworks.umt.edu/tme Part of the Mathematics Commons Let us know how access to this document benefits ou.y Recommended Citation Bergsten, Christer (2010) "Magic Circles in the Arbelos," The Mathematics Enthusiast: Vol. 7 : No. 2 , Article 3. Available at: https://scholarworks.umt.edu/tme/vol7/iss2/3 This Article is brought to you for free and open access by ScholarWorks at University of Montana. It has been accepted for inclusion in The Mathematics Enthusiast by an authorized editor of ScholarWorks at University of Montana. For more information, please contact [email protected]. TMME, vol7, nos.2&3, p .209 Magic Circles in the Arbelos Christer Bergsten1 Department of Mathematics, Linköpings Universitet, Sweden Abstract. In the arbelos three simple circles are constructed on which the tangency points for three circle chains, all with Archimedes’ circle as a common starting point, are situated. In relation to this setting, some algebraic formulae and remarks are presented. The development of the ideas and the relations that were “discovered” were strongly mediated by the use of dynamic geometry software. Key words: Geometry, circle chains, arbelos, inversion Mathematical Subject Classification: Primary: 51N20 Introduction The arbelos2, or ‘the shoemaker’s knife’, studied already by Archimedes, is a configuration of three tangent circles, and may indeed, due to its many remarkable properties, be called three magic circles. In this paper the focus will be on three circles linked to the arbelos, involved in the construction of Archimedes’ circles3 and chains of tangent circles. -

Archimedean Circles of the Collinear Arbelos and the Skewed Arbelos
Journal for Geometry and Graphics Volume 17 (2013), No. 1, 31–52. Archimedean Circles of the Collinear Arbelos and the Skewed Arbelos Hiroshi Okumura 251 Moo 15 Ban Kesorn, Tambol Sila, Amphur Muang Khonkaen 40000, Thailand email: [email protected] Abstract. Several Archimedean circles of the arbelos can be generalized to the collinear arbelos and the skewed arbelos. Key Words: arbelos, collinear arbelos, skewed arbelos, Archimedean circles MSC 2010: 51M04, 51M15, 51N20 1. Introduction The area surrounded by three mutually touching semicircles with collinear centers constructed on the same side is called an arbelos. The radical axis of the two inner semicircles divides the arbelos into two curvilinear triangles with congruent incircles, which are called the twin circles of Archimedes. Circles congruent to the twin circles are called Archimedean circles of the arbelos. The arbelos is generalized in several ways, the generalized arbelos of intersecting type [10], the generalized arbelos of non-intersecting type [9], and the skewed arbelos [6, 8, 12]. In [7] both the generalized arbelos in [9] and [10] are unified as the collinear arbelos with an additional generalized arbelos, and its Archimedean circles are defined. In this paper we give several Archimedean circles of the collinear arbelos. For the skewed arbelos, no definition of Archimedean circles has been given, though several twin circles have been considered. In this paper we define Archimedean circles of the skewed arbelos by generalizing the twin circles of Archimedes of the ordinary arbelos to the skewed arbelos. Then we give several Archimedean circles of the skewed arbelos. For points P and Q, (P Q) is the circle with diameter P Q and P (Q) is the circle with center P passing through the point Q. -

Pappus Chain and Division by Zero Calculus
Pappus chain and division by zero calculus Hiroshi Okumura Maebashi Gunma 371-0123, Japan e-mail: [email protected] Abstract. We consider circles touching two of three circles forming arbeloi with division by zero and division by zero calculus. Keywords. Pappus chain, division by zero, division by zero calculus. Mathematics Subject Classification (2010). 03C99, 51M04. 1. Introduction Let C be a point on the segment AB such that jBCj = 2a and jCAj = 2b (see Figure 1). For an arbelos configuration formed by the three circles α, β and γ with diameters BC, CA and AB, respectively, we consider circles touching two of the three circles by the definition of division by zero [3]: z (1) = 0 for any real number z; 0 and division by zero calculus [21]. We use a rectangular coordinates system with origin C such that the point B has coordinates (2a; 0). We call the line AB the baseline. γ β α C A B Figure 1. 2. Circles touching two of α, β and γ If a circle touches one of given two circles internally and the other externally, we say that the circle touches the twop circles in the opposite sense, otherwise in the same sense. Let c = a + b and d = ab=c. Theorem 1. The following statements hold. (i) A circle touches the circles β and γ in the opposite sense if and only if its has radius rα and center of coordinates (xα; yα) given by z ( z z ) abc b + c rα = and (xα; yα) = −2b + rα; 2zrα for a real number z: z a2z2 + bc z z a z z 1 2 Pappus chain and division by zero calculus (ii) A circle touches the circles γ and α in the opposite sense if and only if its has β β β radius rz and center of coordinates (xz ; yz ) given by ( ) abc c + a rβ = and (xβ; yβ) = 2a − rβ; 2zrβ for a real number z: z b2z2 + ca z z b z z (iii) A circle touches the circles α and β in the same sense if and only if its has γ γ γ radius rz and center of coordinates (xz ; yz ) given by ( ) b − a abc rγ = jqγj and (xγ; yγ) = qγ; 2zqγ ; where qγ = z z z z c z z z c2z2 − ab for a real number z =6 ±d. -

Ubiquitous Archimedean Circles of the Collinear Arbelos
KoG•16–2012 H. Okumura: Ubiquitous Archimedean Circles of the Collinear Arbelos Original scientific paper HIROSHI OKUMURA Accepted 5. 11. 2012. Ubiquitous Archimedean Circles of the Collinear Arbelos Ubiquitous Archimedean Circles of the Collinear Sveprisutne Arhimedove kruˇznice kolinearnog ar- Arbelos belosa ABSTRACT SAZETAKˇ We generalize the arbelos and its Archimedean circles, and Generaliziramo arbelos i njegove Arhimedove kruˇznice show the existence of the generalized Archimedean circles te pokazujemo postojanje generaliziranih Arhimedovih which cover the plane. kruˇznica koje pokrivaju ravninu. Key words: arbelos, collinear arbelos, ubiquitous Kljuˇcne rijeˇci: arbelos, kolinearni arbelos, sveprisutne Archimedean circles Arhimedove kruˇznice MSC 2000: 51M04, 51M15, 51N10 1 Introduction 2 The collinear arbelos For a point O on the segment AB in the plane, the area sur- In this section we generalize the arbelos and the twin cir- rounded by the three semicircles with diameters AO, BO cles of Archimedesto a generalizedarbelos. For two points and AB erected on the same side is called an arbelos. It P and Q in the plane, (PQ) denotes the circle with diameter has lots of unexpected but interesting properties (for an PQ. Let P and Q be point on the line AB, and let α = (AP), β γ extensive reference see [1]). The radical axis of the in- = (BQ) and = (AB). Let O be the point of intersection α β ner semicircles divides the arbelos into two curvilinear tri- of AB and the radical axis of the circles and and let angles with congruent incircles called the twin circles of u = |AB|, s = |AQ|/2 and t = |BP|/2. We use a rectangular Archimedes. -
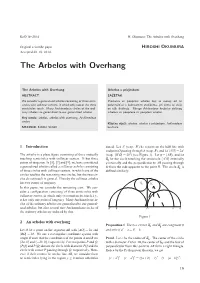
The Arbelos with Overhang
KoG•18–2014 H. Okumura: The Arbelos with Overhang Original scientific paper HIROSHI OKUMURA Accepted 20. 10. 2014. The Arbelos with Overhang The Arbelos with Overhang Arbelos s privjeskom ABSTRACT SAZETAKˇ We consider a generalized arbelos consisting of three semi- Promatra se poop´ceni arbelos koji se sastoji od tri circles with collinear centers, in which only two of the three polukruˇznice s kolinearnim srediˇstima, pri ˇcemu se dvije semicircles touch. Many Archimedean circles of the ordi- on njih dodiruju. Mnoge Arhimedove kruˇznice obi´cnog nary arbelos are generalized to our generalized arbelos. arbelosa su poop´cene za poop´ceni arbelos. Key words: arbelos, arbelos with overhang, Archimedean circles Kljuˇcne rijeˇci: arbelos, arbelos s privjeskom, Arhimedove MSC2010: 51M04, 51N20 kruˇznice 1 Introduction stated. Let A′ (resp. B′) be a point on the half line with endpoint O passing through A (resp. B), and let A′O = 2a′ The arbelos is a plane figure consisting of three mutually (resp. B O = 2b ) (see Figure 1). Let γ = (AB| ), and| let | ′ | ′ touching semicircles with collinear centers. It has three δ′α be the circle touching the semicircle (A′O) externally points of tangency. In [5], [7] and [9], we have considered γ internally and the perpendicular to AB passing through a generalized arbelos called a collinear arbelos consisting O from the side opposite to the point B. The circle δβ′ is of three circles with collinear centers, in which one of the defined similarly. circles touches the remaining two circles, but the two cir- cles do not touch in general. Thereby the collinear arbelos γ has two points of tangency. -

The Archimedean Circles of Schoch and Woo
Forum Geometricorum b Volume 4 (2004) 27–34. bbb FORUM GEOM ISSN 1534-1178 The Archimedean Circles of Schoch and Woo Hiroshi Okumura and Masayuki Watanabe Abstract. We generalize the Archimedean circles in an arbelos (shoemaker’s knife) given by Thomas Schoch and Peter Woo. 1. Introduction Let three semicircles α, β and γ form an arbelos, where α and β touch exter- nally at the origin O. More specifically, α and β have radii a, b>0 and centers (a, 0) and (−b, 0) respectively, and are erected in the upper half plane y ≥ 0. The y-axis divides the arbelos into two curvilinear triangles. By a famous the- orem of Archimedes, the inscribed circles of these two curvilinear triangles are ab congruent and have radii r = a+b . See Figure 1. These are called the twin cir- cles of Archimedes. Following [2], we call circles congruent to these twin circles Archimedean circles. β(2b) α(2a) U2 γ γ β β α α O O 2r Figure 1 Figure 2 For a real number n, denote by α(n) the semicircle in the upper half-plane with center (n, 0), touching α at O. Similarly, let β(n) be the semicircle with center (−n, 0), touching β at O. In particular, α(a)=α and β(b)=β. T. Schoch has found that (1) the distance from the intersection of α(2a) and γ to the y-axis is 2r, and (2) the circle U2 touching γ internally and each of α(2a), β(2b) externally is Archimedean. -

Some Archimedean Incircles in an Arbelos
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 8 (2019), No. 2, 84 - 98 SOME ARCHIMEDEAN INCIRCLES IN AN ARBELOS NGUYEN NGOC GIANG and LE VIET AN Abstract. In this paper, we show that some Archimedean incircles con- structed from the arbelos. As we known, \An arbelos is a plane region bounded by three semicircles with three apexes such that each corner of the semicircles is shared with one of the others (connected), all on the same side of a straight line (the baseline) that contains their diameters. One of the properties of the arbe- los noticed and proved by Archimedes in his Book of Lemmas is that the two small circles inscribed into two pieces of the arbelos cut off by the line perpendicular to the baseline through the common point of the two small semicircles are congruent. The circles have been known as Archimedes' twin circles. Consider an arbelos formed by semi-circles (O1), (O2), and (O) of radii a; b; and a + b. The semi-circles (O1) and (O) meet at A,(O2) and (O) at B,(O1) and (O2) at C. Let CD be the divided line of the smaller ab semi-circles. The radius of Archimedes' twin circles equals t := a+b . Circles of the same radius are said to be Archimedean.", [1]. In this article, we go to some new Archimedean incircles constructed from the arbelos. 0 0 Theorem 1. Let O1;O2 be points symmetric to the points O1;O2 with re- 0 spect to the points A; B, respectively. Tangent line to (O) at D meets (BO1) 0 at A1 and B1, and meets (AO2) at A2 and B2. -

DIVISION by ZERO CALCULUS (Draft)
DIVISION BY ZERO CALCULUS (draft) SABUROU SAITOH December 31, 2019 Abstract: The common sense on the division by zero with the long and mysterious history is wrong and our basic idea on the space around the point at infinity is also wrong since Euclid. On the gradient or on differential coefficients we have a great missing since tan(π=2) = 0. Our mathematics is also wrong in elementary mathematics on the division by zero. In this book in a new and definite sense, we will show and give various applica- tions of the division by zero 0=0 = 1=0 = z=0 = 0. In particular, we will introduce several fundamental concepts in calculus, Eu- clidean geometry, analytic geometry, complex analysis and dif- ferential equations. We will see new properties on the Laurent expansion, singularity, derivative, extension of solutions of dif- ferential equations beyond analytical and isolated singularities, and reduction problems of differential equations. On Euclidean geometry and analytic geometry, we will find new fields by the concept of the division by zero. We will collect many concrete properties in mathematical sciences from the viewpoint of the division by zero. We will know that the division by zero is our elementary and fundamental mathematics. Key Words: Division by zero, division by zero calculus, singularity, derivative, differential equation, 0=0 = 1=0 = z=0 = 0, tan(π=2) = 0, log 0 = 0, infinity, discontinuous, point at in- 1 finity, Puha’s horn torus model, Däumler’s horn torus model, gradient, Laurent expansion, extension of solutions of differen- tial equations, reduction problems of differential equations, ana- lytic geometry, singular integral, conformal mapping, Euclidean geometry, Wasan, absolute function theory, Isabelle/HOL, Rie- mann zeta function, axiom.