Mathematisches Forschungsinstitut Oberwolfach Combinatorics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Interview with Martin Davis
Notices of the American Mathematical Society ISSN 0002-9920 ABCD springer.com New and Noteworthy from Springer Geometry Ramanujan‘s Lost Notebook An Introduction to Mathematical of the American Mathematical Society Selected Topics in Plane and Solid Part II Cryptography May 2008 Volume 55, Number 5 Geometry G. E. Andrews, Penn State University, University J. Hoffstein, J. Pipher, J. Silverman, Brown J. Aarts, Delft University of Technology, Park, PA, USA; B. C. Berndt, University of Illinois University, Providence, RI, USA Mediamatics, The Netherlands at Urbana, IL, USA This self-contained introduction to modern This is a book on Euclidean geometry that covers The “lost notebook” contains considerable cryptography emphasizes the mathematics the standard material in a completely new way, material on mock theta functions—undoubtedly behind the theory of public key cryptosystems while also introducing a number of new topics emanating from the last year of Ramanujan’s life. and digital signature schemes. The book focuses Interview with Martin Davis that would be suitable as a junior-senior level It should be emphasized that the material on on these key topics while developing the undergraduate textbook. The author does not mock theta functions is perhaps Ramanujan’s mathematical tools needed for the construction page 560 begin in the traditional manner with abstract deepest work more than half of the material in and security analysis of diverse cryptosystems. geometric axioms. Instead, he assumes the real the book is on q- series, including mock theta Only basic linear algebra is required of the numbers, and begins his treatment by functions; the remaining part deals with theta reader; techniques from algebra, number theory, introducing such modern concepts as a metric function identities, modular equations, and probability are introduced and developed as space, vector space notation, and groups, and incomplete elliptic integrals of the first kind and required. -

The West Math Collection
Anaheim Meetings Oanuary 9 -13) - Page 15 Notices of the American Mathematical Society January 1985, Issue 239 Volume 32, Number 1, Pages 1-144 Providence, Rhode Island USA ISSN 0002-9920 Calendar of AMS Meetings THIS CALENDAR lists all meetings which have been approved by the Council prior to the date this issue of the Notices was sent to the press. The summer and annual meetings are joint meetings of the Mathematical Association of America and the American Mathematical Society. The meeting dates which fall rather far in the future are subject to change; this is particularly true of meetings to which no numbers have yet been assigned. Programs of the meetings will appear in the issues indicated below. First and supplementary announcements of the meetings will have appeared in earlier issues. ABSTRACTS OF PAPERS presented at a meeting of the Society are published in the journal Abstracts of papers presented to the American Mathematical Society in the issue corresponding to that of the Notices which contains the program of the meeting. Abstracts should be submitted on special forms which are available in many departments of mathematics and from the office of the Society. Abstracts must be accompanied by the Sl5 processing charge. Abstracts of papers to be presented at the meeting must be received at the headquarters of the Society in Providence. Rhode Island. on or before the deadline given below for the meeting. Note that the deadline for abstracts for consideration for presentation at special sessions is usually three weeks earlier than that specified below. For additional information consult the meeting announcements and the list of organizers of special sessions. -

Department of Mathematics — Spring/Summer 2014
Department of Mathematics Spring/Summer 2014 Math Times Department of Mathematics — Spring/Summer 2014 Athreya and Hur receive NSF CAREER awards Assistant Professors Vera Hur and Jayadev Athreya have each Jayadev Athreya’s project “Randomness in Geometry and been awarded a five-year National Science Foundation (NSF) Dynamics” involves using ideas from dynamical systems, CAREER award. CAREER awards support career development probability theory and geometry to understand randomness plans that integrate research and education. They are among in various geometric and dynamical contexts. Athreya is the NSF’s most prestigious awards. Assistant Professor Kay developing new measures of complexity for parabolic Kirkpatrick received a CAREER award in 2013. dynamical systems using spacing statistics and gap Vera Hur’s project “Analysis of surface water waves” will address distributions, and using renormalization methods to compute several issues in the mathematical aspects of surface water these invariants. Athreya and his collaborators are also creating waves. She plans to develop new tools in partial differential new notions of random geometric objects and structures, by equations and other branches of mathematics, and also extend placing appropriate measures on moduli spaces of geometric and combine existing tools, to focus on: objects, and understanding properties of random objects by computing moments of various functions with respect to these • Global regularity versus finite-time singularities for the measures. initial value problem. The measures of • Existence of traveling waves and their classification. complexity being • Stability and instability of traveling waves. designed in this project will help Her project emphasizes large-scale dynamics and genuinely detect new types of nonlinear behaviors, such as breaking and peaking, which chaotic behavior in ultimately rely on analytical proofs for an acute understanding. -

943 Estimates Stemming from Carleman for Operators Having an Imagi- Nary Part Lying in a £-Ideal. the Latter Results Make Exten
I97i] BOOK REVIEWS 943 estimates stemming from Carleman for operators having an imagi nary part lying in a £-ideal. The latter results make extensive use of the theory of analytic functions and especially of entire functions. The principal application of these results in this volume is to the completeness problem of root spaces. Approximately one-third of the book is devoted to this problem along with a study of the various kinds of bases which can exist in Hubert space and the notion of expansion appropriate to each. The early and fundamental results of M. V. Keldys in this area are presented in complete detail. A rather thorough presentation of this area is given with various tech niques being illustrated. Lastly, various asymptotic properties of the spectrum of weakly perturbed operators are given. In summary this book is a thorough and complete treatment along with many worthy contributions of some important but relatively neglected areas of abstract operator theory with applications to more immediate and concrete problems. We eagerly await the remaining two volumes. RONALD DOUGLAS Introduction to analytic number theory, by K. Chandrasekharan, Springer, 1968; Arithmetic functions, by K. Chandrasekharan, Springer, 1970; Multiplicative number theory, by Harold Davenport, Markham, 1967; Sequences, by H. Halberstam and K. F. Roth, Oxford University Press, 1966. Recent years have seen an explosion in the number of books in most branches of mathematics and this is true of number theory. Most books contain little that is new, even in book form. This is the case of 8/3 of the four books in this review. -

Heini Halberstam
DEPARTMENT OF MATHEMATICS University of Illinois Memorial Service IN memory of Heini HAlberstam Tuesday, April 29, 2014 • Opening remarks Matthew Ando, Professor and Chair, Department of Mathematics, University of Illinois • Video clip ‘From China to Urbana-Champaign’ This documentary, about the Chinese student population at the University of Illinois during the past 100 years, features Heini and Doreen Halberstam. Published April 9, 2014. • Earl Berkson, Professor Emeritus, Department of Mathematics, University of Illinois • Bruce Berndt, Professor, Department of Mathematics, University of Illinois • Edward Bruner, Professor Emeritus, Department of Anthropology, University of Illinois • Kevin Ford, Professor, Department of Mathematics, University of Illinois • Harold Diamond, Professor Emeritus, Department of Mathematics, University of Illinois • Michael Halberstam, son of Heini and Doreen Halberstam Please join US in 239 AlTgElD HAll for A reception immediately follOwing the service. Heini Halberstam 1926-2014 Heini Halberstam died at home in Champaign, Illinois on January 25, 2014 at the age of 87. He had a mathematical career extending over 60 years and had been active until the last months of his life. Heini was an internationally known figure in number theory, particularly for his work in sieve theory. In addition to his scholarship, Heini was treasured for his encouraging and optimistic manner, beautiful writing, energy, and his interest in people. Heini was born in 1926 in Brux, Czechoslovakia, where his father was the rabbi of the Orthodox congregation. When he was ten years old, his father died, and he and his mother, Judita, moved to Prague. After the German invasion of Czechoslovakia, Heini’s mother arranged for him a place on a Kindertransport train to London. -

Vitae Ken Ono Citizenship
Vitae Ken Ono Citizenship: USA Date of Birth: March 20,1968 Place of Birth: Philadelphia, Pennsylvania Education: • Ph.D., Pure Mathematics, University of California at Los Angeles, March 1993 Thesis Title: Congruences on the Fourier coefficients of modular forms on Γ0(N) with number theoretic applications • M.A., Pure Mathematics, University of California at Los Angeles, March 1990 • B.A., Pure Mathematics, University of Chicago, June 1989 Research Interests: • Automorphic and Modular Forms • Algebraic Number Theory • Theory of Partitions with applications to Representation Theory • Elliptic curves • Combinatorics Publications: 1. Shimura sums related to quadratic imaginary fields Proceedings of the Japan Academy of Sciences, 70 (A), No. 5, 1994, pages 146-151. 2. Congruences on the Fourier coefficeints of modular forms on Γ0(N), Contemporary Mathematics 166, 1994, pages 93-105., The Rademacher Legacy to Mathe- matics. 3. On the positivity of the number of partitions that are t-cores, Acta Arithmetica 66, No. 3, 1994, pages 221-228. 4. Superlacunary cusp forms, (Co-author: Sinai Robins), Proceedings of the American Mathematical Society 123, No. 4, 1995, pages 1021-1029. 5. Parity of the partition function, 1 2 Electronic Research Annoucements of the American Mathematical Society, 1, No. 1, 1995, pages 35-42 6. On the representation of integers as sums of triangular numbers Aequationes Mathematica (Co-authors: Sinai Robins and Patrick Wahl) 50, 1995, pages 73-94. 7. A note on the number of t-core partitions The Rocky Mountain Journal of Mathematics 25, 3, 1995, pages 1165-1169. 8. A note on the Shimura correspondence and the Ramanujan τ(n)-function, Utilitas Mathematica 47, 1995, pages 153-160. -
Notices of the American Mathematical Society ABCD Springer.Com
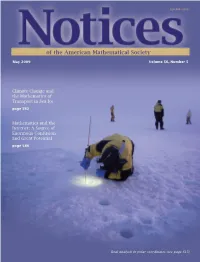
ISSN 0002-9920 Notices of the American Mathematical Society ABCD springer.com More Math Number Theory NEW Into LaTeX An Intro duc tion to NEW G. Grätzer , Mathematics University of W. A. Coppel , Australia of the American Mathematical Society Numerical Manitoba, National University, Canberra, Australia Models for Winnipeg, MB, Number Theory is more than a May 2009 Volume 56, Number 5 Diff erential Canada comprehensive treatment of the Problems For close to two subject. It is an introduction to topics in higher level mathematics, and unique A. M. Quarte roni , Politecnico di Milano, decades, Math into Latex, has been the in its scope; topics from analysis, Italia standard introduction and complete modern algebra, and discrete reference for writing articles and books In this text, we introduce the basic containing mathematical formulas. In mathematics are all included. concepts for the numerical modelling of this fourth edition, the reader is A modern introduction to number partial diff erential equations. We provided with important updates on theory, emphasizing its connections consider the classical elliptic, parabolic articles and books. An important new with other branches of mathematics, Climate Change and and hyperbolic linear equations, but topic is discussed: transparencies including algebra, analysis, and discrete also the diff usion, transport, and Navier- the Mathematics of (computer projections). math Suitable for fi rst-year under- Stokes equations, as well as equations graduates through more advanced math Transport in Sea Ice representing conservation laws, saddle- 2007. XXXIV, 619 p. 44 illus. Softcover students; prerequisites are elements of point problems and optimal control ISBN 978-0-387-32289-6 $49.95 linear algebra only A self-contained page 562 problems. -

NEWSLETTER No
NEWSLETTER No. 454 January 2016 LMS 150TH ANNIVERSARY Mathematics Festival at THE LONDON SCIENCE MUSEUM What's your Angle? Uncovering Maths See report on page 3 SOCIETY MEETINGS AND EVENTS • 26 February: Mary Cartwright Lecture, London page 12 • 21 July: Society Meeting at the 7ECM, Berlin • 21 March: Society Meeting at the BMC, Bristol page 21 • 11 November: Graduate Student Meeting, London • 21–25 March: LMS Invited Lectures, Loughborough • 11 November: Annual General Meeting, London • 8 July: Graduate Student Meeting, London • 20 December: South West & South Wales Regional • 8 July: Society Meeting, London Meeting, Bath NEWSLETTER ONLINE: newsletter.lms.ac.uk @LondMathSoc LMS NEWSLETTER http://newsletter.lms.ac.uk Contents No. 454 January 2016 22 32 150th Anniversary Events Heidelberg Laureate Forum..................41 Departmental Celebrations....................18 Integrable Systems..................................45 What's Your Angle? Uncovering Maths...3 Mathematics Emerging..........................44 Awards Modern Topics in Nonlinear PDE and Geometric Analysis...............................31 2 Christopher Zeeman Medal 2016...........13 Singularities and Applications...............43 Louis Bachelier Prize 2016........................39 Why be Noncommutative?.....................44 LMS Honorary Membership.....................7 ICME-13 Bursaries....................................19 News Ramanujan Prize 2016............................37 European News.......................................25 Royal Society Medals and Awards 2016...37 -

Department of Mathematics University of South Carolina Self-Study November 2002
Department of Mathematics University of South Carolina Self-Study November 2002 Short Curricula Vitæ and The Publications of the Mathematics Faculty George Androulakis Graduate Education: University of Texas, Austin Ph.D. August 1996; Thesis Advisor: Haskell P. Rosenthal Undergratuate Education: University of Crete, Greece. Professional Employment Permanent Positions 2000-present Assistant Professor University of South Carolina, Columbia Visiting Positions 1998-2000 Visiting Assistant Professor Texas A & M University 1996-1998 Postdoctoral Fellow University of Missouri, Columbia 1994-1996 Assistant Instructor University of Texas, Austin Awards and Honors 1998 NSF Young Investigator Award 1995-1996 Professional Development Award University of Texas, Austin Publications: 14 articles (8 in print, 2 accepted, 1 submitted, 3 in preparation) Invited Addresses and External Colloquia/Seminars: 22 in 14 different institutions in 2 countries. Grant Support: 1 NSF research grant: 1999-2002. Conference Organizing or Program Committees: 1 regional conference. Refereeing and Reviewing: Referee for 6 professional journals. Reviewer for 1 funding agency. Re- viewer for Mathematical Reviews. November 15, 2002 George Androulakis The Publications of George Androulakis 1. G. Androulakis and T. Schlumprecht, Strictly singular, non-compact operators exist on the space of Gowers and Maurey, J. London Math. Soc. (2) 64 (2001), 655–674. 1 843 416 2. George Androulakis, Peter G. Casazza, and Denka N. Kutzarova, Some more weak Hilbert spaces, Canad. Math. Bull. 43 (2000), 257–267. MR 2002h:46012 3. George Androulakis and Stamatis Dostoglou, Positivity results for the Yang-Mills-Higgs Hessian, Pacific J. Math. 194 (2000), 1–17. MR 2001h:58015 4. G. Androulakis and E. Odell, Distorting mixed Tsirelson spaces, Israel J. -

Of the American Mathematical Society ISSN 0002-9920
Notices of the American Mathematical Society ISSN 0002-9920 ABCD springer.com New and Noteworthy from Springer of the American Mathematical Society Ramanujan‘s Lost Notebook Scheduling INCLUDES September 2008 Volume 55, Number 8 Part II Theory, Algorithms, CD-ROM G. E. Andrews , Penn State University, University Park, PA, USA; and Systems B. C. Berndt , University of Illinois at Urbana, IL, USA M. L. Pinedo , New York The primary topics addressed in this second volume on the University, New York, NY, USA lost notebook are q-series, Eisenstein series, and theta This book on scheduling covers both functions. Most of the entries on q-series are located in the theoretical models as well as heart of the original lost notebook, while the entries on scheduling problems in the real world. Eisenstein series are either scattered in the lost notebook or It includes a CD that contains movies with regard to are found in letters that Ramanujan wrote to G.H. Hardy from implementations of scheduling systems as well as slide- nursing homes. shows from the industry. 2008. Approx. 430 p. 3 illus. Hardcover 3rd ed. 2008. With CD-ROM. Hardcover ISBN 978-0-387-77765-8 7 approx. $89.00 ISBN 978-0-387-78934-7 7 $89.95 An Introduction to Semiparallel Homological Algebra 2ND Submanifolds in EDITION J. J. Rotman , University of Illinois at Space Forms Urbana-Champaign, IL, USA Ülo Lumiste, University of Tartu, In this brand new edition the text has been fully updated and Estonia revised throughout and new material on sheaves and abelian Quite simply, this book is the most categories has been added. -

Klaus Friedrich Roth 29 October 1925 – 10 November 2015
Klaus Friedrich Roth 29 October 1925 – 10 November 2015 Obituary written by William Chen, David Larman, Trevor Stuart and Robert Vaughan for the London Mathematical Society First published by the London Mathematical Society in the January 2016 edition of the LMS Newsletter http://newsletter.lms.ac.uk/klaus-roth-1925-2015/#more-2213 Klaus Friedrich Roth, who was elected to membership of the London Mathematical Society on 17 May 1951 and awarded the De Morgan Medal in 1983, has died in Inverness, aged 90. He was the first British winner of the Fields Medal, and made fundamental contributions to different areas of number theory, including Diophantine approximation, the large sieve, irregularities of distribution and arithmetic combinatorics. Klaus Roth was born on 29 October 1925, in the German city of Breslau, in Lower Silesia, Prussia, now Wrocław in Poland. To escape from Nazism, he and his parents moved to England in 1933, with his maternal grandparents, and settled in London. He would recall that the flight from Berlin to London took eight hours and landed in Croydon. His father had suffered from gas poisoning during the First World War, and died within a few years of their arrival in England. Roth studied at St Paul's School, and proceeded to read mathematics at the University of Cambridge, where he was a student at Peterhouse and also played first board for the university chess team. However, he had many unhappy and painful memories of his two years there as an undergraduate. Uncontrollable nerves were to seriously hamper his examination results, and he graduated with third class honours. -

NUMBER THEORY at the UNIVERSITY of ILLINOIS Introduction
NUMBER THEORY AT THE UNIVERSITY OF ILLINOIS Introduction The Mathematics Department of the University of Illinois at Urbana–Champaign has long been known for the strength of its program in number theory. The depart- ment has a large and distinguished faculty noted for their work in this area, and the graduate program in number theory attracts students from throughout the world. At present over twenty students are writing dissertations in number theory. Each semester upper level graduate courses are offered in a variety of topics in analytic, algebraic, combinatorial, and elementary number theory. At least three regularly scheduled seminars are held each week, with lectures being given by faculty, gradu- ate students, and visiting scholars. The lectures may be elementary introductions, surveys, or expositions of current research. Almost every year, our number theorists hold one or two conferences. More details are provided below for each facet of our program. We begin with a list of the faculty in number theory with brief descriptions of their main interests. At the end of this document, a more detailed account of the research interests of each faculty member is given. Faculty in Number Theory Scott Ahlgren, modular forms and connections to number theory, partitions, character sums, Diophantine equations. Paul T. Bateman (Emeritus), sums of squares, prime number theory. Michael Bennett, diophantine approximation, transcendence theory. Bruce Berndt, Ramanujan’s notebooks, elliptic functions, theta-functions, q- series, continued fractions, character sums, classical analysis. Florin Boca, diophantine approximation, spacing statistics. Nigel Boston, Galois representations, arithmetic geometry, computer algebra, coding theory. Douglas Bowman, continued fractions, the theory of partitions, basic hypergeo- metric functions and other q–series, diophantine approximation, and arithmetical functions.