Implementation of Numerical Integration to High-Order Elements on the Gpus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AMD's Llano Fusion
AMD’S “LLANO” FUSION APU Denis Foley, Maurice Steinman, Alex Branover, Greg Smaus, Antonio Asaro, Swamy Punyamurtula, Ljubisa Bajic Hot Chips 23, 19th August 2011 TODAY’S TOPICS . APU Architecture and floorplan . CPU Core Features . Graphics Features . Unified Video decoder Features . Display and I/O Capabilities . Power Gating . Turbo Core . Performance 2 | LLANO HOT CHIPS | August 19th, 2011 ARCHITECTURE AND FLOORPLAN A-SERIES ARCHITECTURE • Up to 4 Stars-32nm x86 Cores • 1MB L2 cache/core • Integrated Northbridge • 2 Chan of DDR3-1866 memory • 24 Lanes of PCIe® Gen2 • x4 UMI (Unified Media Interface) • x4 GPP (General Purpose Ports) • x16 Graphics expansion or display • 2 x4 Lanes dedicated display • 2 Head Display Controller • UVD (Unified Video Decoder) • 400 AMD Radeon™ Compute Units • GMC (Graphics Memory Controller) • FCL (Fusion Control Link) • RMB (AMD Radeon™ Memory Bus) • 227mm2, 32nm SOI • 1.45BN transistors 4 | LLANO HOT CHIPS | August 19th, 2011 INTERNAL BUS . Fusion Control Link (FCL) – 128b (each direction) path for IO access to memory – Variable clock based on throughput (LCLK) – GPU access to coherent memory space – CPU access to dedicated GPU framebuffer . AMD Radeon™ Memory Bus (RMB) – 256b (each direction) for each channel for GMC access to memory – Runs on Northbridge clock (NCLK) – Provides full bandwidth path for Graphics access to system memory – DRAM friendly stream of reads and write – Bypasses coherency mechanism 5 | LLANO HOT CHIPS | August 19th, 2011 Dual-channel DDR3 Unified Video DDR3 UVD Decoder NB CPU CPU Graphics SIMD Integrated Integrated GPU, Display Northbridge Array Controller I/O Controllers L2 Display L2 I/OMultimedia Controllers L2 PCI Express I/O - 24 lanes, optional 1 MB L2 cache L2 I/O per core digital display interfaces CPU CPU Digital display interfaces 4 Stars-32nm PCIe CPU cores PPL Display PCIe PCIe Display 6 | LLANO HOT CHIPS | August 19th, 2011 CPU, GPU, UVD AND IO FEATURES STARS-32nm CPU CORE FEATURES . -

ATI Radeon™ HD 3450 Video Guide
ATI Radeon™ HD 3450 High Definition HTPC for the masses Table of Contents Introduction................................................................................................. 3 Video Benchmarking Checklist ..................................................................... 7 How To Evaluate Video Playback Performance ............................................. 8 Video Playback Performance ...................................................................... 13 Appendix A: ATI Radeon™ HD 3450 based HTPC ........................................ 16 ©2007 Advanced Micro Devices, Inc., AMD, The AMD arrow, Athlon, ATI, the ATI logo, Avivo, ATI Radeon™ HD 3450 - Video Review Guide 2 Catalyst, The Ultimate Visual Experience and Radeon are trademarks of Advanced Micro Devices, Inc. Features, pricing, availability and specifications may vary by product model and are subject to change without notice. Products may not be exactly as shown. Not all features may be implemented by all manufacturers. Introduction High Definition (HD) content is gaining in popularity, driven by the increasing availability and affordability of HD-capable televisions, new releases of movies on HD media (Blu-rayTM & HD DVD) and a desire by consumers for a more immersive entertainment experience. It may be possible for consumers to upgrade their current PCs by adding new HD DVD and/or Blu-rayTM optical drives; however, the remaining PC components might lack the required processing capabilities for fully featured and smooth HD content playback. HD content presents -

AMD Accelerated Parallel Processing Opencl Programming Guide
AMD Accelerated Parallel Processing OpenCL Programming Guide November 2013 rev2.7 © 2013 Advanced Micro Devices, Inc. All rights reserved. AMD, the AMD Arrow logo, AMD Accelerated Parallel Processing, the AMD Accelerated Parallel Processing logo, ATI, the ATI logo, Radeon, FireStream, FirePro, Catalyst, and combinations thereof are trade- marks of Advanced Micro Devices, Inc. Microsoft, Visual Studio, Windows, and Windows Vista are registered trademarks of Microsoft Corporation in the U.S. and/or other jurisdic- tions. Other names are for informational purposes only and may be trademarks of their respective owners. OpenCL and the OpenCL logo are trademarks of Apple Inc. used by permission by Khronos. The contents of this document are provided in connection with Advanced Micro Devices, Inc. (“AMD”) products. AMD makes no representations or warranties with respect to the accuracy or completeness of the contents of this publication and reserves the right to make changes to specifications and product descriptions at any time without notice. The information contained herein may be of a preliminary or advance nature and is subject to change without notice. No license, whether express, implied, arising by estoppel or other- wise, to any intellectual property rights is granted by this publication. Except as set forth in AMD’s Standard Terms and Conditions of Sale, AMD assumes no liability whatsoever, and disclaims any express or implied warranty, relating to its products including, but not limited to, the implied warranty of merchantability, fitness for a particular purpose, or infringement of any intellectual property right. AMD’s products are not designed, intended, authorized or warranted for use as compo- nents in systems intended for surgical implant into the body, or in other applications intended to support or sustain life, or in any other application in which the failure of AMD’s product could create a situation where personal injury, death, or severe property or envi- ronmental damage may occur. -

Sapphire Hd 7870 2Gb Gddr5 Xt with Boost
SAPPHIRE HD 7870 2GB GDDR5 XT WITH BOOST The SAPPHIRE HD 7870 XT with Boost delivers a new price:performance point to the series. It is based on AMD’s Tahiti architecture with its 256-bit memory interface, and 1536 stream processors and 96 Texture units, unlike the remainder of the HD 7800 series that uses the Pitcairn architecture. Configured with 2GB of high speed GDDR5 memory running at 1500 MHz (6GHz effective) the SAPPPHIRE HD 7870 XT has a core clock of 925MHz which dynamically rises to 975MHz with PowerTune Boost, AMDs dynamic performance enhancement for games. For enthusiasts wishing to maximise performance of this graphics card, the latest version of the SAPPHIRE overclocking tool, TriXX supports this technology and is available free to download from the SAPPHIRE website. SAPPHIRE TriXX allows tuning of GPU voltage as well as core and memory clocks, whilst continuously displaying temperature. Manual control of fan speed is supported, as well as user created fan profiles and the ability to save up to four different performance settings. Like66 Shop Now Overview System Requirements News Download Specification 1 x HDMI (with 3D) Output 2 x Mini-DisplayPort 1 x Dual-Link DVI-I Default:925 MHz Eclk; With Boost: 975 : MHz Core Clock GPU 28 nm Chip 1536 x Stream Processors 2048 MB Size Video Memory 256 -bit GDDR5 6000 MHz Effective 275(L)x115(W)x35(H) mm Size. Dimension 2 x slot Driver CD Software SAPPHIRE TriXX Utility CrossFire™ Bridge Interconnect Cable DVI to VGA Adapter Accessory Mini-DP to DP Cable 6 PIN to 4 PIN Power Cable x 2 Overview HDMI (with 3D) Support for Deep Color, 7.1 High Bitrate Audio, and 3D Stereoscopic, ensuring the highest quality Blu-ray and video experience possible from your PC. -
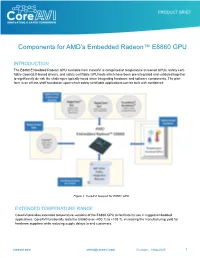
AMD Radeon E8860
Components for AMD’s Embedded Radeon™ E8860 GPU INTRODUCTION The E8860 Embedded Radeon GPU available from CoreAVI is comprised of temperature screened GPUs, safety certi- fiable OpenGL®-based drivers, and safety certifiable GPU tools which have been pre-integrated and validated together to significantly de-risk the challenges typically faced when integrating hardware and software components. The plat- form is an off-the-shelf foundation upon which safety certifiable applications can be built with confidence. Figure 1: CoreAVI Support for E8860 GPU EXTENDED TEMPERATURE RANGE CoreAVI provides extended temperature versions of the E8860 GPU to facilitate its use in rugged embedded applications. CoreAVI functionally tests the E8860 over -40C Tj to +105 Tj, increasing the manufacturing yield for hardware suppliers while reducing supply delays to end customers. coreavi.com [email protected] Revision - 13Nov2020 1 E8860 GPU LONG TERM SUPPLY AND SUPPORT CoreAVI has provided consistent and dedicated support for the supply and use of the AMD embedded GPUs within the rugged Mil/Aero/Avionics market segment for over a decade. With the E8860, CoreAVI will continue that focused support to ensure that the software, hardware and long-life support are provided to meet the needs of customers’ system life cy- cles. CoreAVI has extensive environmentally controlled storage facilities which are used to store the GPUs supplied to the Mil/ Aero/Avionics marketplace, ensuring that a ready supply is available for the duration of any program. CoreAVI also provides the post Last Time Buy storage of GPUs and is often able to provide additional quantities of com- ponents when COTS hardware partners receive increased volume for existing products / systems requiring additional inventory. -

SAPPHIRE R9 285 2GB GDDR5 ITX COMPACT OC Edition (UEFI)
Specification Display Support 4 x Maximum Display Monitor(s) support 1 x HDMI (with 3D) Output 2 x Mini-DisplayPort 1 x Dual-Link DVI-I 928 MHz Core Clock GPU 28 nm Chip 1792 x Stream Processors 2048 MB Size Video Memory 256 -bit GDDR5 5500 MHz Effective 171(L)X110(W)X35(H) mm Size. Dimension 2 x slot Driver CD Software SAPPHIRE TriXX Utility DVI to VGA Adapter Mini-DP to DP Cable Accessory HDMI 1.4a high speed 1.8 meter cable(Full Retail SKU only) 1 x 8 Pin to 6 Pin x2 Power adaptor Overview HDMI (with 3D) Support for Deep Color, 7.1 High Bitrate Audio, and 3D Stereoscopic, ensuring the highest quality Blu-ray and video experience possible from your PC. Mini-DisplayPort Enjoy the benefits of the latest generation display interface, DisplayPort. With the ultra high HD resolution, the graphics card ensures that you are able to support the latest generation of LCD monitors. Dual-Link DVI-I Equipped with the most popular Dual Link DVI (Digital Visual Interface), this card is able to display ultra high resolutions of up to 2560 x 1600 at 60Hz. Advanced GDDR5 Memory Technology GDDR5 memory provides twice the bandwidth per pin of GDDR3 memory, delivering more speed and higher bandwidth. Advanced GDDR5 Memory Technology GDDR5 memory provides twice the bandwidth per pin of GDDR3 memory, delivering more speed and higher bandwidth. AMD Stream Technology Accelerate the most demanding applications with AMD Stream technology and do more with your PC. AMD Stream Technology allows you to use the teraflops of compute power locked up in your graphics processer on tasks other than traditional graphics such as video encoding, at which the graphics processor is many, many times faster than using the CPU alone. -

Condor 4108Xx
Condor 4108xX Key features of this product: - AMD ® Embedded Radeon® E8860 GPU Low Latency GPGPU & Video Capture XMC - Video Inputs: (2) ARINC 818 with Dual ARINC 818 Video Inputs/Outputs - Video Outputs: (2) ARINC 818 & (2) DisplayPort - Rear XMC I/O (Pn6 VITA 46.9, x12d+x8d+24s) The Condor 4108xX is a rugged, XMC Graphics card based on the AMD® - Low Latency Video Capture Radeon® E8860 GPU. This card is built with two DisplayPort and two ARINC 818 compatible outputs, along with two ARINC 818 compatible inputs. The - 2 GB GDDR5 Graphics Memory AMD GPU supports OpenGL, DirectX, and OpenCL and can be used for GPGPU - 640 Shader Processors applications. This XMC card can simultaneously capture and display two simultaneous ARINC 818 compatible video streams that include frame header, -128-bit Memory Interface container header, video and ancillary data. The card captures the incoming video - 72 GB/s Memory Bandwidth data and sends it over PCIe to the host machine as raw data with low latency. - Up to 768 GFLOPs FP32 Compute Performance The AMD GPU on the Condor 4108xX supports OpenCL and can be used for compute - H.264 Hardware Decoder (UVD 4.0) intensive GPGPU applications. Applications can access video streams in the form of - H.264 Hardware Encoder (VCE 1.0) raw frames for processing, 360˚ stitching, frame/video analysis, compression or video streaming. All decoding, scaling, video combining and format conversions can be done - MIL-STD-810 in the GPU with minimal CPU impact. A simple, proven and efficient API is provided - Conduction Cooled to handle all video capture, processing and display and can integrate seamlessly into - Thermally Efficient Heatsink Technology your application. -
AMD APU Series
AMD APU series Connor Goss, Jefferson Medel Agenda ➢ Overview ➢ APU vs. CPU+GPU ➢ Graphics Engines ➢ CPU Architecture ➢ Future Overview ● What is an APU? ○ Accelerated Processing Unit ○ A processor that combines CPU and GPU elements into a single architecture ● APU brand of AMD, Intel uses different name ● Why APU? ○ Able to perform tasks of both a CPU and GPU with less space and power. ○ At cost of performance compared to high end individual units ○ Sufficient for majority of computers Essentially... ● CPUs use serial data processing ● GPUs use parallel data processing http://www.legitreviews.com/amd-vision-the-399-brazos-notebook-platform-preview_1464 History ● Single Core ○ Limitations ■ Speed ■ Power ■ Complexity ● Multi Core ○ Limitations ■ Power ■ Scalability ● Heterogeneous ○ CPU and GPUs designed separately do not work optimally together ○ Graphics Capability included in chip rather than in chipset Bandwidth http://amd-dev.wpengine.netdna-cdn.com/wordpress/media/2012/10/apu101.pdf Heterogeneous System Architecture http://developer.amd.com/resources/heterogeneous-computing/what-is-heterogeneous-system-architecture-hsa/ Iterations ➢ Desktop Processors ○ Llano - Trinity - Richland - Kaveri ➢ Server Processors ○ Kyoto ➢ Mobile CPUs and GPUs ● Different Design Goals ○ CPUs are base on maximizing performance of a single thread ○ GPUs maximize throughput at cost of individual thread performance ● CPU ○ Dedicated to reduce latency to memory ● GPU ○ Focus on ALU and registers ○ Focus on covering latency Graphics Engine ➢ Based on AMD/ATI -

Condor 4107Xx Front
Rugged XMC graphics and video capture card outputs based on the AMD Radeon E8860 GPU with two 3G-SDI video inputs and outputs. LOW LATENCY DUAL 3G-SDI HIGH-PERFORMANCE VIDEO CAPTURE I/O GPU Rugged XMC Graphics Card Two 3G-SDI Inputs/Outputs. AMD Radeon™ E8860 GPU with Video Capture One VGA/RGsB and one 2 GB GDDR5 graphics memory DisplayPort Output. XMC Graphics & GPGPU Card with Two 3G-SDI Video Outputs/Input The Condor 4107xX is a rugged, conduction cooled XMC graphics and video capture card based on the AMD Radeon E8860 GPU with two 3G-SDI video inputs and outputs. This product is designed for seamless integration with VPX Single Board Computers (SBC). The Condor 4107xX supports two 3G/HD/SD-SDI, one DisplayPort and one VGA or RGsB (STANAG 3350, RS-343) video output. It also captures up to two simultaneous 3G-SDI video inputs, brings the data into GPU memory with extremely low latency, and can be used for compute intensive GPGPU applications. Applications can access the captured video data in the form of raw frames for image processing, 360˚stitching, frame/video analysis, compression or video streaming. All decoding, scaling, video combining and format conversions can be done in the GPU with minimal CPU impact. This enables developers to capture video data from a camera or other SDI source, perform video tracking or analysis on the data using the GPU, and then send the 3G-SDI video on to a compatible display device, such as a monitor. The input streams can be displayed on any of the outputs and can be positioned or sized (enlarged or shrunk). -

AMD Details Next-Generation Platform for Notebook Pcsamd Details Next-Generation Platform for Notebook Pcs 18 May 2007
AMD Details Next-Generation Platform for Notebook PCsAMD Details Next-Generation Platform for Notebook PCs 18 May 2007 At a press conference in Tokyo, Japan, AMD today AMD’s next-generation notebook “Griffin” officially disclosed more details of its next- microprocessor. With “Griffin,” AMD will deliver a generation open platform for notebook computing. number of new capabilities to enhance battery life Codenamed “Puma,” the platform is designed to and overall mobile computing performance. deliver battery life, graphics and video processing enhancements and improved overall system New notebook processing innovations in “Griffin” performance for an enhanced visual experience. include: The “Puma” platform is expected to build on the -- power optimized HyperTransport and memory successful launches of the AMD M690 mobile controllers integrated in the processor silicon that chipset and 65nm process-based AMD Turion 64 operate on a separate power plane as the X2 dual-core mobile technology in April and May processor cores, thereby enabling the cores to go 2007, respectively. into reduced power states; -- dynamic performance scaling offers enhanced The key technologies that comprise “Puma” are battery life with reduced power consumption AMD’s next-generation notebook processor, through separate voltage planes enabling each codenamed “Griffin”, matched with the next- core to operate at independent frequency and generation AMD “RS780” mobile chipset. This voltage; and new platform exemplifies AMD’s commitment to -- power-optimized HyperTransport 3.0 with a more improve platform stability, time to market, than tripling of peak I/O bandwidth, plus new power performance/energy-efficiency and overall features including dynamic scaling of link widths. consumer and commercial customers’ experience via its acquisition and integration of ATI. -

R6950 Series Automatically Analyze and List Drivers, BIOS, and Utilities You Need
6 5 Features Features Using MSI Live Update Online Installing MSI Live Update MICRO-STAR INT'L MSI Live Update offers you with brand-new update service experience, which can MS-V803/ V246 1. Link to MSI's website at http://www.msi.com significantly save your time while searching files. MSI Live Update is capable to 2. Find Live Update Online under the selection of Downloads on the web page. R6950 series automatically analyze and list drivers, BIOS, and utilities you need. With the easy-to- use updating approaches, you can increase the performance of your system easily and 3. Select CLICK HERE to continue. quickly. Follow the instructions below, with a few mouse clicks, you can acquire the related files for the system updating. 4. Select Yes, I would like to try it at my own risk to continue. WARNING!! 5. Follow the on-screen instructions to complete the utility downloading and installing DO NOT touch the cooling procedures. system since it may produce 1. Insert the supplied disk into the a certain heat while CD-ROM drive, and start the processing tasks. Setup program. 2. Click the Utility tab on the setup screen. 3. Click the MSI Live Update. CAUTION!! Follow the on-screen instructions Do not force the GPU cooler to complete the installation. against the fragile GPU to avoid damage to the GPU. ! 4. Launch MSI Live Update utility to proceed the updating function. Under the European Union ("EU") Directive on Waste Electrical and Electronic Equipment, Directive 2002/96/EC, which takes Using Live VGA Driver Update effect on August 13, 2005, products of "electrical and electronic equipment" cannot be discarded as municipal waste anymore and This service enables you to update the latest VGA driver for your VGA card. -

AMD Radeon ™ E8860 Embedded GPU
Product Brief AMD Radeon ™ E8860 Embedded GPU SUPERIOR MULTIDISPLAY VERSATILITY The latest evolution in AMD Radeon™ embedded GPUs leverages advanced The AMD Radeon E8860 GPU provides multi-display flexibility, supporting up to five 3840x2160 @30Hz displays simultaneously in Graphics Core Next architecture, delivering clone mode and extended desktop in static screen. Competitive 5 breakthrough performance and power NVIDIA GPUs can only support up to four independent displays. efficiency gains. The AMD Radeon E8860 GPU supporting AMD Eyefinity technology6 PRODUCT OVERVIEW can expand a high-resolution picture across multiple displays. In addition, one display of 4096x2160 @60Hz over one HDMI™ or DP1.2 The AMD Radeon™ E8860 Embedded discrete GPU – the first interface can be supported, providing a superior viewing experience. embedded GPU developed on the groundbreaking Graphics Core This flexible, one-to-many system-to-display configuration Next (GCN) architecture – pushes AMD Radeon graphics and capability enables ultra-immersive visual experiences via a single parallel processing performance to unprecedented new heights small form factor system. while increasing power efficiency. OPTIMIZED FOR GRAPHICS-INTENSIVE APPLICATIONS Providing 2x higher 3D graphics performance1 and 33% higher The AMD Radeon E8860 GPU was designed to increase multimedia single-precision floating point performance than the AMD Radeon processing performance and power efficiency for a range of 2 E6760 GPU , the AMD Radeon E8860 GPU delivers industry- leading embedded applications, including: 3D video graphics performance, enabling stunning, multi- display visual experiences for a range of embedded applications spanning Digital gaming. Supporting rich 3D and 4K video graphics and digital gaming, digital signage, medical imaging, and avionics.