Engineering Basics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Using Pulleys with Electric Motors
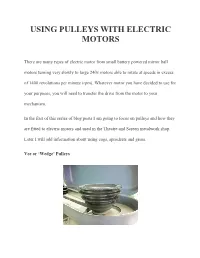
USING PULLEYS WITH ELECTRIC MOTORS There are many types of electric motor from small battery powered mirror ball motors turning very slowly to large 240v motors able to rotate at speeds in excess of 1400 revolutions per minute (rpm). Whatever motor you have decided to use for your purposes, you will need to transfer the drive from the motor to your mechanism. In the first of this series of blog posts I am going to focus on pulleys and how they are fitted to electric motors and used in the Theatre and Screen metalwork shop. Later I will add information about using cogs, sprockets and gears. Vee or ‘Wedge’ Pulleys Pulleys are commonly used if the motor is going to rotate at high speed, but not always as I have seen them used in heavy duty mirror ball motors. The drive is transferred to another pulley using a vee belt (both pulley and vee belt are shown in the image above). This type of pulley (with multiple grooves) is called a ‘step pulley’. Step pulleys are used to adjust the speed of rotation of the final drive without having to take the pulley off and replace it with another. The vee belt is ‘jumped’ across the different diameter 'vee groove’ to change the final drive rpm. A large diameter, driving a small diameter will increase the speed of the final drive rpm. Inversely, a small diameter driving a large diameter will reduce the final drive rpm. These are basic gearing principles that are explained. If you are using step pulleys to adjust the drive speed, you will need to ensure that they are both identical in size (matched) or the belt will either; not grip, or be too tight, as you change the belt from groove to groove. -

Engineering Info
Engineering Info To Find Given Formula 1. Basic Geometry Circumference of a circle Diameter Circumference = 3.1416 x diameter Diameter of a circle Circumference Diameter = Circumference / 3.1416 2. Motion Ratio High Speed & Low Speed Ratio = RPM High RPM Low RPM Feet per Minute of Belt RPM = FPM and Pulley Diameter .262 x diameter in inches Belt Speed Feet per Minute RPM & Pulley Diameter FPM = .262 x RPM x diameter in inches Ratio Teeth of Pinion & Teeth of Gear Ratio = Teeth of Gear Teeth of Pinion Ratio Two Sprockets or Pulley Diameters Ratio = Diameter Driven Diameter Driver 3. Force - Work - Torque Force (F) Torque & Diameter F = Torque x 2 Diameter Torque (T) Force & Diameter T = ( F x Diameter) / 2 Diameter (Dia.) Torque & Force Diameter = (2 x T) / F Work Force & Distance Work = Force x Distance Chain Pull Torque & Diameter Pull = (T x 2) / Diameter 4. Power Chain Pull Horsepower & Speed (FPM) Pull = (33,000 x HP)/ Speed Horsepower Force & Speed (FPM) HP = (Force x Speed) / 33,000 Horsepower RPM & Torque (#in.) HP = (Torque x RPM) / 63025 Horsepower RPM & Torque (#ft.) HP = (Torque x RPM) / 5250 Torque HP & RPM T #in. = (63025 x HP) / RPM Torque HP & RPM T #ft. = (5250 x HP) / RPM 5. Inertia Accelerating Torque (#ft.) WK2, RMP, Time T = WK2 x RPM 308 x Time Accelerating Time (Sec.) Torque, WK2, RPM t = WK2 x RPM 308 x Torque WK2 at motor WK2 at Load, Ratio WK2 Motor = WK2 Ratio2 6. Gearing Gearset Centers Pd Gear & Pd Pinion Centers = ( PdG + PdP ) / 2 Pitch Diameter No. of Teeth & Diametral Pitch Pd = Teeth / DP Pitch Diameter No. -

Engine Crankshaft Pulley Clutch
Europaisches Patentamt European Patent Office 0 Publ ication number: 0 136 384 Office europeen des brevets A1 © EUROPEAN PATENT APPLICATION © Application number: 83401933.3 © lnt.CI.«: F 02 N 17/08 F 02 B 67/06 © Date of filing: 03.10.83 © Date of publication of application: ©Applicant: Canadian Fram Limited 10.04.85 Bulletin 85/15 540 Park Avenue East P.O. Box 2014 Chatham Ontario N7M 5M7(CA) @ Designated Contracting States: DE FR GB IT © Inventor: Dejong, Allen W. 34 English Sideroad Chatham Ontario N7M 4417(CA) © Representative: Brulle, Jean et al. Service Brevets Bendix 44, rue Francois 1er F-75008Paris(FR) © Engine crankshaft pulley clutch. © A vehicle engine (10) carries a number of belt-driven accessories which are driven through a belt (16) and a clutch and pulley assembly (14) carried on the engine crankshaft (12). The assembly (14) includes an electromagnetic coil (56) which responds to an electrical signal to couple the pulley (36) for rotation with the crankshaft (12) when a signal is transmitted to the coil (56) and to otherwise permit the crankshaft (12) to turn relative to the pulley (36). A throttle position switch (82) intercepts the signal to the coil (56) when the throttle mechanism of the vehicle is moved to a predetermined position when the vehicle is accelerated to thereby disconnect the pulley (36) from the crankshaft (12) during vehicle accelerations. The coil (56) is also wired through the vehicle ignition switch (86) so that the pulley (36) is also disconnected from the crankshaft (12) when the vehicle is started. 00 M CD M LU Croydon Printing Company Ltd. -

Subaru Crank Pulley Tool Manual
503.2 - Subaru Crank Pulley Tool 1 V2 Instructions SPECIAL NOTES: • The use of a factory service manual is highly recommended. These can be purchased at the dealer, or downloaded online at http://techinfo.subaru.com • Company23 is not responsible for damage done to your vehicle as a result of misuse of this product. • Company23 does its best to ensure the accuracy of this manual but is not responsible for errors. LOOSENING INSTRUCTIONS: Step 1) Gain Access to accessory belts by removing the air duct and belt covers. Step 2) Remove the accessory belts by relieving the tension from the alternator and the A/C idler. On 08+ models utilizing the A/C stretch belt it is necessary to rotate the engine 1-3 times using the 22mm crank bolt while a helper pulls on the belt from the A/C pulley to feed the belt off the pulley. Step 3) You must identify which crank pulley you have. The Company23 crank tool works with 2 types of OEM crank pulleys. If you have the pulley on top, thread in the 4 larger bolts into the Company23 crank pulley tool. If you have the pulley on the bottom, thread in the 4 smaller bolts into the reinforcement ring with the Company23 crank pulley tool in between. 1 Step 4) After the 4 pins have been installed into the tool, insert the tool into the crank pulley. Step 5) Using a 1/2" drive breaker bar and a 22mm socket, loosen the crank pulley bolt while firmly holding the Company23 Crank Pulley Tool. -

From Ancient Greece to Byzantium
Proceedings of the European Control Conference 2007 TuA07.4 Kos, Greece, July 2-5, 2007 Technology and Autonomous Mechanisms in the Mediterranean: From Ancient Greece to Byzantium K. P. Valavanis, G. J. Vachtsevanos, P. J. Antsaklis Abstract – The paper aims at presenting each period are then provided followed by technology and automation advances in the accomplishments in automatic control and the ancient Greek World, offering evidence that transition from the ancient Greek world to the Greco- feedback control as a discipline dates back more Roman era and the Byzantium. than twenty five centuries. II. CHRONOLOGICAL MAP OF SCIENCE & TECHNOLOGY I. INTRODUCTION It is worth noting that there was an initial phase of The paper objective is to present historical evidence imported influences in the development of ancient of achievements in science, technology and the Greek technology that reached the Greek states from making of automation in the ancient Greek world until the East (Persia, Babylon and Mesopotamia) and th the era of Byzantium and that the main driving force practiced by the Greeks up until the 6 century B.C. It behind Greek science [16] - [18] has been curiosity and was at the time of Thales of Miletus (circa 585 B.C.), desire for knowledge followed by the study of nature. when a very significant change occurred. A new and When focusing on the discipline of feedback control, exclusively Greek activity began to dominate any James Watt’s Flyball Governor (1769) may be inherited technology, called science. In subsequent considered as one of the earliest feedback control centuries, technology itself became more productive, devices of the modern era. -

Chapter 8 Glossary
Technology: Engineering Our World © 2012 Chapter 8: Machines—Glossary friction. A force that acts like a brake on moving objects. gear. A rotating wheel-like object with teeth around its rim used to transmit force to other gears with matching teeth. hydraulics. The study and technology of the characteristics of liquids at rest and in motion. inclined plane. A simple machine in the form of a sloping surface or ramp, used to move a load from one level to another. lever. A simple machine that consists of a bar and fulcrum (pivot point). Levers are used to increase force or decrease the effort needed to move a load. linkage. A system of levers used to transmit motion. lubrication. The application of a smooth or slippery substance between two objects to reduce friction. machine. A device that does some kind of work by changing or transmitting energy. mechanical advantage. In a simple machine, the ability to move a large resistance by applying a small effort. mechanism. A way of changing one kind of effort into another kind of effort. moment. The turning force acting on a lever; effort times the distance of the effort from the fulcrum. pneumatics. The study and technology of the characteristics of gases. power. The rate at which work is done or the rate at which energy is converted from one form to another or transferred from one place to another. pressure. The effort applied to a given area; effort divided by area. pulley. A simple machine in the form of a wheel with a groove around its rim to accept a rope, chain, or belt; it is used to lift heavy objects. -
Pulley Dimensional Reference Identification Instructions
PULLEY DIMENSIONAL REFERENCE IDENTIFICATION INSTRUCTIONS DAYCO IDLER/TENSIONER PULLEYS The advanced technologies employed in the materials research, engineering and manufacture of DAYCO idler/ tensioner pulleys has earned them a reputation for quality long lasting performance. Maximum structural integrity and optimal design are guaranteed through “modeling” using state-of-the-art 3D Computer Aided Design software and Finite Element Analysis. The manufacture of either our specially formulated glass filled polymer (plastic) pulleys or metal pulleys with smoother surfaces and tighter dimensional tolerances reduces vibration which translates into a cooler running belt and ultimately longer belt life. Lifetime lubricated ball bearing and high temperature grease and seals assure peak bearing performance. These elements working together all provide the smooth, quiet drive service that both the Automotive OE and Aftermarket demand. Determine if pulley is: 3Flat with Flange ................................ 3Flat without flange ............................ (count grooves) Example of 4 groove 3Grooved with flange .......................... (count grooves) Example of 6 groove 3Grooved without flange ..................... Competitive pulleys may vary slightly 2 IDENTIFICATION INSTRUCTIONS DAYCO IDLER/TENSIONER PULLEY DIMENSIONS EXPLANATION B C “A” Overall Diameter “B” Overall Width “C” Bearing ID1 D A “D” Bearing ID2 A B C D Overall Overall Bearing Bearing Description Part# Diameter Width ID1 ID2 64mm 33.5mm 14.5mm 8.4mm GLASS FILLED POLYMER (PLASTIC) -

Pulleysandgearsreview 134.Pdf
Pulleys and Gears Review Package Name: _________________ Pulleys What is a pulley? The Pulley is a simple machine that consists of a wheel with a grove and a rope. The rope is looped through the grove in the wheel. What is a pulley used for? A pulley is used to lift objects that people could not normally lift on their own. The object you are lifting is called the load. You will pull on the rope which will lift the object up. The number of pulleys you use affect how much you have to pull. There are two types of pulleys: Fixed Pulley: This pulley is attached to a non- moving object. It is usually fixed to the ceiling or high areas. Movable Pulley: This pulley is attached to the object you are trying to move. When the object moves, the pulley moves with it. Pulleys and Gears Review Package How do pulleys save us work? Pulleys help you move heavy things that you could not move on your own. The amount of effort you need to put into lifting the object depends on the weight of the object and pulleys you use. What happens when I use a Fixed Pulley? A Fixed pulley will change the direction 100N you pull, but not the effort you put in. Instead of lifting the object up, with a fixed pulley, you pull down on a rope. 100N Since only one rope is holding up the object, you still need to pull with a force equal to how much the object weighs. How is a movable pulley different If the load weighs 100N, they you have to pull with a force of 100N from a fixed pulley? A movable pulley is attached to the load. -
A Machine with Few Or No Moving Parts. Simple Machines Make Work Easier
Simple Machine: A machine with few or no moving parts. Simple machines make work easier. http://www.youtube.com/watch?v=grWIC9VsFY4 Pulley 1.There are six simple machines. They make it easier for us to do work. A wheel pulley is one of the six simple machines. A pulley is a wheel with a rope wrapped around it. The wheel has a groove around the edge to hold the rope in place. You can attach one end of the rope to a heavy object that you want to lift. You will pull on the other end of the rope to lift the heavy object. Pulleys make work easier by changing the direction of the force needed to do work. It is hard to lift a heavy object up into the air. It is easier to pull the same object down to the ground. This is because of the force of gravity. Gravity is the force that pulls objects down to the Earth. Gravity helps to make work easier when you use a pulley. You can also use more than one pulley at a time to make the work even easier. The weight will feel lighter with each pulley that you use. If you use two pulleys, it will feel like you are pulling one-half as much weight. If you use four pulleys, it will feel like you are pulling one-fourth as much weight! The weight will be easy to move, but you will have more rope to pull with each pulley that you add. You will pull twice as much rope with two pulleys. -
Move a Car with Pulleys Did You Know, You Could Lift a Car by Yourself? It’S True! with the Help of Pulleys, It’S Possible
Move a Car with Pulleys Did you know, you could lift a car by yourself? It’s true! With the help of pulleys, it’s possible. So what is a pulley and how does it make you able to lift a car? A pulley is a rope or wire wrapped around a wheel, changing the direction of force. A simple one-wheel pulley system hanging from the ceiling lets you pull something up by pulling down on a rope. The more wheels you add, the less force you need to pull the object. One pulley still means you’re moving the full weight of the object. A second pulley, one attached to the ceiling and another to the object, reduces the force needed to lift the object. Why does adding more pulleys make it easier to move? You’re trading distance for force. The more pulleys you have in the system, the more rope you’ll need to pull (more distance of rope to pull = less force needed). This force can be measured in foot-pounds. The equation is: work = force * distance (W=F*d). So, you’re going to always do the same amount of work, but some work is easier than other work. Walking with a rope is easier than lifting a car straight up. So if you want to lift a car, all you need are enough pulleys and enough rope and you can lift it. The pulleys spread the force out over the length of the rope. That’s why you see pulleys on cranes, elevators, and sailboats. -

Pulleys and Gears Science Review Answers
Pulleys and Gears Science Review Answers 1. What is a pulley? A pulley is a simple machine, which is a wheel with a grooved rim and rope, belt or chain that passes around it. It can make lifting a load easier. 2. Name 5 machines/devices that use a pulley system. Flagpole Water well Crane Elevator Fishing Rod Window Blind Window Washer Ledge/scaffold Weight Machine Tow Truck Clothes Line 3. What are gears? Gears are simple machines. It is a wheel with teeth around its edge that interlocks with the teeth of other gears. 4. Name 5 machines/devices that use a gear system. Clock Bike Mixing Beaters Pencil Sharpener Watch Can Opener Treadmill 5. Name and explain 4 different types of gears. Spur Gears – has teeth that go straight up and down when the gear lies flat; can change the speed or direction of motion Bevel Gears – has a sloped rim and the gears teeth are also sloped; they can change the speed and direction of motion Worm Gears – it looks like a screw and can be linked to a spur gear; the system changes the speed and direction of motion Herringbone Gears – has teeth that are shaped like a V; 6. Explain the following pulley systems: a. Fixed Pulley System A fixed pulley system is attached to a structure and does not move; changes the direction of the effort force used to lift a load; you must use the same amount of effort force to pull as you would if you were lifting the load without a pulley b. -

Design and Reconstruction of an Ancient Roman Crane
Advances in Historical Studies, 2020, 9, 261-283 https://www.scirp.org/journal/ahs ISSN Online: 2327-0446 ISSN Print: 2327-0438 Design and Reconstruction of an Ancient Roman Crane Marco Ceccarelli Department of Industrial Engineering, University of Rome Tor Vergata, Rome, Italy How to cite this paper: Ceccarelli, M. Abstract (2020). Design and Reconstruction of an Ancient Roman Crane. Advances in His- Archeological remains and literature sources are used to work out design torical Studies, 9, 261-283. considerations and reconstruction activities on an ancient Roman crane. De- https://doi.org/10.4236/ahs.2020.95021 sign requirements have been elaborated by looking at the Vitruvius work as Received: October 30, 2020 republished during Renaissance and considering practical aspects of material Accepted: December 5, 2020 and manufacturing both in ancient time and today possibilities. Results are Published: December 8, 2020 reported in terms of design developments and experiences for prototype re- constructions that have been exhibited in a museum. Copyright © 2020 by author(s) and Scientific Research Publishing Inc. This work is licensed under the Creative Keywords Commons Attribution International License (CC BY 4.0). History of Machines, Ancient Roman Cranes, Historical Analysis, http://creativecommons.org/licenses/by/4.0/ Reconstruction Design Open Access 1. Introduction Ancient Roman machines attract great attention not only for their specific de- signs of relevant interest for the History of Engineering and Technology, but also for the surprising levels of technology that can be identified in those solutions. Historical literature has been elaborated to track machinery evolution with analysis of designs and products as part of the mankind history in which Roman machine engineering and technology are recognized of relevant importance and impact even as a basis for modern western world, in encyclopedic works like for example in (Capocaccia 1973), (Singer et al.