Mechanical Efficiency of Differential Gearing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Experimental Investigation of Helical Gear Efficiency
AN EXPERIMENTAL INVESTIGATION OF HELICAL GEAR EFFICIENCY A Thesis Presented in Partial Fulfillment of the Requirements for The Degree of Master of Science in the Graduate School of the Ohio State University By Aarthy Vaidyanathan, B. Tech. * * * * * The Ohio State University 2009 Masters Examination Committee: Dr. Ahmet Kahraman Approved by Dr. Donald R Houser Advisor Graduate Program in Mechanical Engineering ABSTRACT In this study, a test methodology for measuring load-dependent (mechanical) and load- independent power losses of helical gear pairs is developed. A high-speed four-square type test machine is adapted for this purpose. Several sets of helical gears having varying module, pressure angle and helix angle are procured, and their power losses under jet- lubricated conditions are measured at various speed and torque levels. The experimental results are compared to a helical gear mechanical power loss model from a companion study to assess the accuracy of the power loss predictions. The validated model is then used to perform parameter sensitivity studies to quantify the impact of various key gear design parameters on mechanical power losses and to demonstrate the trade off that must take place to arrive at a gear design that is balanced in all essential aspects including noise, durability (bending and contact) and power loss. ii Dedicated to all those before me who had far fewer opportunities, and yet accomplished so much more. iii ACKNOWLEDGMENTS I would like to thank my advisor, Dr. Ahmet Kahraman, who has been instrumental in fostering interest and enthusiasm in all my research endeavors. His encouragement throughout the course of my studies was invaluable, and I look to him for guidance in all my future undertakings. -
Energy Conversion and Efficiency in Turboshaft Engines
E3S Web of Conferences 85, 01001 (2019) https://doi.org/10.1051/e3sconf/20198501001 EENVIRO 2018 Energy conversion and efficiency in turboshaft engines Cristian Dobromirescu1, and Valeriu Vilag1,* 1 Research and development institute for gas turbines COMOTI, Aviation and industrial turbines. Gas-turbines assembly department, 220 D Iuliu Maniu Bd., sector 6, Bucharest Romania Abstract. This paper discusses the methods of energy conversion in a turboshaft engine. Those methods cover the thermodynamic cycle and the engine performances, the possible energy sources and their impact on environment as well as the optimal solutions for maximum efficiency in regards to turbine design and application. The paper also analyzes the constructive solutions that limit the efficiency and performances of turboshaft engines. For the purpose of this paper a gas-turbine design task is performed on an existing engine to appreciate the methods presented. In the final part of this paper it is concluded that in order to design an engine it is necessary to balance the thermodynamic aspects, for maximum efficiency, and the constructive elements, so that the engine can be manufactured. − Pressure. 1 Introduction The source of energy for the engine is the fuel. For the combustion to take place in optimal conditions, or at Since the creation of the first internal combustion engine all at high altitudes, it is necessary to increase the it is a top priority to use as much energy and as pressure of the intake air through a compressor. The efficiently as possible [1]. Thus, the study of energy compressor consumes work and increases the potential conversion and energy efficiency is very important and energy of the air by raising its pressure. -
Unit for a Power Split Continuously Variable Transmission
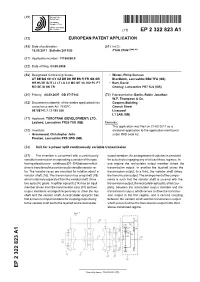
(19) & (11) EP 2 322 823 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 18.05.2011 Bulletin 2011/20 F16H 37/08 (2006.01) (21) Application number: 11155260.0 (22) Date of filing: 03.09.2008 (84) Designated Contracting States: • Winter, Philip Duncan AT BE BG CH CY CZ DE DK EE ES FI FR GB GR Blackburn, Lancashire BB2 7FA (GB) HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT • Burt, David RO SE SI SK TR Chorley, Lancashire PR7 5UJ (GB) (30) Priority: 04.09.2007 GB 0717143 (74) Representative: Bartle, Robin Jonathan W.P. Thompson & Co. (62) Document number(s) of the earlier application(s) in Coopers Building accordance with Art. 76 EPC: Church Street 08788747.7 / 2 195 556 Liverpool L1 3AB (GB) (71) Applicant: TOROTRAK (DEVELOPMENT) LTD. Leyland, Lancashire PR26 7UX (GB) Remarks: This application was filed on 21-02-2011 as a (72) Inventors: divisional application to the application mentioned • Greenwood, Christopher John under INID code 62. Preston, Lancashire PR5 3WS (GB) (54) Unit for a power split continuously variable transmission (57) The invention is concerned with a continuously output member. An arrangement of clutches is provided variable transmission incorporating a variator of the type for selectively engaging any of at least three regimes. In having at least two co- axial races (D1- D4) between which one regime the recirculater output member drives the drive is transferred at a continuously variable variator ra- transmission output. In another the layshaft drives the tio. The variator races are mounted for rotation about a transmission output. -

Download Full-Text
Journal of Mechanical Engineering and Automation 2020, 9(1): 1-8 DOI: 10.5923/j.jmea.20200901.01 Verification of the Dynamic Characteristics of an Epicyclic Gear Train Using Epicyclic Gear Train and Torque Apparatus Mauton Gbededo1,2,*, Chukwuemeke Onyenefa2, Matthew Arowolo1 1Department of Mechatronics Engineering, Federal University, Oye-Ekiti, Nigeria 2Department of Mechanical & Biomedical Engineering, Bells University of Technology, Ota, Nigeria Abstract An epicyclic gear train consists of two gears, mounted so that the center of one gear revolved around the center of the other. A carrier connects the centers of the two gears and it rotates to carry one gear, called the planet gear or planet pinion, around the other, called the sun gear or sun wheel. The planet and sun gears were meshed so that their pitch circles rolled without slipping. A point on the pitch circle of the planet gear traced an epicycloid curve. This paper deals with analysis and verification of dynamic characteristics of an epicyclic gear train using the gear train and torque apparatus. The apparatus was installed in the Engineering lab while taking adequate safety precautions to ensure accurate collection of data. A record of the input, holding and output at various speed of the gear system were taken. At the end of the experiment, gear ratio, speed ratio and torque relationship of the epicyclic gear train were obtained. The experimental results were compared to the analytical data from various calculations using respective governing equations. It was observed that the experimental results were similar to the analytical data obtained for the speed ratio and torque relationship with a maximum 1.11% deviation between the two methods for torque relationship and 1.6% for the speed ratios, which were due to some frictional and mechanical losses in the belt and gear system. -

THERMAL EFFICIENCY", of the Engine
PowerPower FlowFlow andand EfficiencyEfficiency Engine Testing and Instrumentation 1 Efficiencies When the engine converts fuel into power, the process is rather inefficient and only about a quarter of the potential energy in the fuel is released as power at the flywheel. The rest is wasted as heat going down the exhaust and into the air or water. This ratio of actual to potential power is called the "THERMAL EFFICIENCY", of the engine. How much energy reaches the flywheel ( or dynamometer) compared to how much could theoretically be released is a function of three efficiencies, namely: 1. Thermal 2 Mechanical 3. Volumetric Engine Testing and Instrumentation 2 Thermal Efficiency Thermal efficiency can be quoted as either brake or indicated. Indicated efficiency is derived from measurements taken at the flywheel. The thermal efficiency is sometimes called the fuel conversion efficiency, defined as the ratio of the work produced per cycle to the amount of fuel energy supplied per cycle that can be released in the combustion process. Engine Testing and Instrumentation 3 B.S. = Brake Specific Brake Specific Fuel Consumption = mass flow rate of fuel ÷ power output bsHC = Brake Specific Hydrocarbons = mass of hydrocarbons/power output. e.g. 0.21 kg /kW hour Engine Testing and Instrumentation 4 Thermal Efficiency Wc Ps ηt = = m f QHV µ f QHV Wc − work _ per _ cycle Ps − power _ output m f − mass _ of _ fuel _ per _ cycle QHV − heating _ value _ of _ fuel µ f − fuel _ mass _ flow _ rate Specific fuel consumption µ Sfc = f Ps Therefore 1 3600 82.76 ηt = = = Sfc ⋅QHV Sfc(g / kW ⋅hr)QHV (MJ / kg) Sfc Since, QHV for petrol = 43.5 MJ/kg Therefore, the brake thermal efficiency = 82.76/ sfc The indicated thermal efficiency = 82.76 / isfc Engine Testing and Instrumentation 5 Mechanical Efficiency The mechanical efficiency compares the amount of energy imparted to the pistons as mechanical work in the expansion stroke to that which actually reaches the flywheel or dynamometer. -

Mechanical Efficiency As an Index of Skill in Sports
MECHANICAL EFFICIENCY AS AN INDEX OF SKILL IN SPORTS Hlroh Yamamoto Biomechanics Laboratory Faculty of Education, Kanazawa University Kanazawa, Japan 920 Kinesiologists as well as physiologists have been aware of the existance of optimal energy cost during various spotrs activity, daily behavior, basic movement patterns and so on. Although research has explored this issue from a biomechanical approach, no published research has involved a <J.uantitative approach of mechanical efficiency, that lS, skill to optimization problem. On the other hand, in order to facilitate the understanding of movement of humans and other living things, a number of equipments and te~~niques have been devteed to record and measure movement with respect to efficiency involved in various movement patterns. Most reseaches in many sports include informations concerning the analysis of the effective~ess (degree of success or level of skill) and safety aspects of movement of human being. But little is written concerning efficiency, that is, mechanical efficiency, as it relates to sports. The purpose of this study was to present mechanical efficiency_research of skill in ~ports pertaining to methods by which mechanical efficiency can be determine. Mechanical efficiency may be con-: sidered as one of tpe effective and significant parameters in quantitative analysis of skill in sports. And also generally a skilled athlete will normally have a high mechanical efficiency. Data concerning mechanical efficiency of persons performing various ways in which the knowledge of training and conditioning and exercise physiology are integrated into the coaching of sports through mechanical efficiency concept. The application Jf this concept to the quantitative analysis of movement patterns will be shown. -
1700 Animated Linkages
Nguyen Duc Thang 1700 ANIMATED MECHANICAL MECHANISMS With Images, Brief explanations and Youtube links. Part 1 Transmission of continuous rotation Renewed on 31 December 2014 1 This document is divided into 3 parts. Part 1: Transmission of continuous rotation Part 2: Other kinds of motion transmission Part 3: Mechanisms of specific purposes Autodesk Inventor is used to create all videos in this document. They are available on Youtube channel “thang010146”. To bring as many as possible existing mechanical mechanisms into this document is author’s desire. However it is obstructed by author’s ability and Inventor’s capacity. Therefore from this document may be absent such mechanisms that are of complicated structure or include flexible and fluid links. This document is periodically renewed because the video building is continuous as long as possible. The renewed time is shown on the first page. This document may be helpful for people, who - have to deal with mechanical mechanisms everyday - see mechanical mechanisms as a hobby Any criticism or suggestion is highly appreciated with the author’s hope to make this document more useful. Author’s information: Name: Nguyen Duc Thang Birth year: 1946 Birth place: Hue city, Vietnam Residence place: Hanoi, Vietnam Education: - Mechanical engineer, 1969, Hanoi University of Technology, Vietnam - Doctor of Engineering, 1984, Kosice University of Technology, Slovakia Job history: - Designer of small mechanical engineering enterprises in Hanoi. - Retirement in 2002. Contact Email: [email protected] 2 Table of Contents 1. Continuous rotation transmission .................................................................................4 1.1. Couplings ....................................................................................................................4 1.2. Clutches ....................................................................................................................13 1.2.1. Two way clutches...............................................................................................13 1.2.1. -

Development of a Generalized Mechanical Efficiency Prediction Methodology for Gear Pairs
DEVELOPMENT OF A GENERALIZED MECHANICAL EFFICIENCY PREDICTION METHODOLOGY FOR GEAR PAIRS DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Hai Xu, B.S., M.S.E., M.S. ***** The Ohio State University 2005 Dissertation Committee: Approved by Dr. Ahmet Kahraman, Advisor Dr. Donald R. Houser ________________________________ Dr. Anthony F. Luscher Advisor Dr. James Schmiedeler Graduate Program in Mechanical Engineering © Copyright by Hai Xu 2005 ABSTRACT In this study, a general methodology is proposed for the prediction of friction- related mechanical efficiency losses of gear pairs. This methodology incorporates a gear contact analysis model and a friction coefficient model with a mechanical efficiency formulation to predict the gear mechanical efficiency under typical operating conditions. The friction coefficient model uses a new friction coefficient formula based on a non- Newtonian thermal elastohydrodynamic lubrication (EHL) model. This formula is obtained by performing a multiple linear regression analysis to the massive EHL predictions under various contact conditions. The new EHL-based friction coefficient formula is shown to agree well with measured traction data. Additional friction coefficient formulae are obtained for special contact conditions such as lubricant additives and coatings by applying the same regression technique to the actual traction data. These coefficient of friction formulae are combined with a contact analysis model and the mechanical efficiency formulation to compute instantaneous torque/power losses and the mechanical efficiency of a gear pair at a given position. This efficiency prediction methodology is applied to both parallel axis (spur and helical) and cross-axis (spiral bevel and hypoid) gears. -

Novel Designs and Geometry for Mechanical Gearing
Novel Designs and Geometry for Mechanical Gearing by Erasmo Chiappetta School of Engineering, Computing and Mathematics Oxford Brookes University In collaboration with Norbar Torque Tools ltd., UK. A thesis submitted in partial fulfilment of the requirements of Oxford Brookes University for the degree of Doctor of Philosophy September 2018 Abstract This thesis presents quasi-static Finite Element Methods for the analysis of the stress state occurring in a pair of loaded spur gears and aims to further research the effect of tooth profile modifications on the mechanical performance of a mating gear pair. The investigation is then extended to epicyclic transmissions as they are considered the most viable solution when the transmission of high torque level within a compact volume is required. Since, for the current study, only low speed conditions are considered, dynamic loads do not play a crucial role. Vibrations and the resulting noise might be considered negligible and consequently the design process is dictated entirely by the stress state occurring on the mating components. Gear load carrying capacity is limited by maximum contact and bending stress and their correlated failure modes. Consequently, the occurring stress state is the main criteria to characterise the load carrying capacity of a gear system. Contact and bending stresses are evaluated for multiple positions over a mesh cycle of a contacting tooth pair in order to consider the stress fluctuation as consequence of the alternation of single and double pairs of teeth in contact. The influence of gear geometrical proportions on mechanical properties of gears in mesh is studied thoroughly by means of the definition of a domain of feasible combination of geometrical parameters in order to deconstruct the well-established gear design process based on rating standards and base the defined gear geometry on operational and manufacturing constraints only. -

Basic Fundamentals of Gear Drives
Basic Fundamentals of Gear Drives Course No: M06-031 Credit: 6 PDH A. Bhatia Continuing Education and Development, Inc. 22 Stonewall Court Woodcliff Lake, NJ 07677 P: (877) 322-5800 [email protected] BASIC FUNDAMENTALS OF GEAR DRIVES A gear is a toothed wheel that engages another toothed mechanism to change speed or the direction of transmitted motion. Gears are generally used for one of four different reasons: 1. To increase or decrease the speed of rotation; 2. To change the amount of force or torque; 3. To move rotational motion to a different axis (i.e. parallel, right angles, rotating, linear etc.); and 4. To reverse the direction of rotation. Gears are compact, positive-engagement, power transmission elements capable of changing the amount of force or torque. Sports cars go fast (have speed) but cannot pull any weight. Big trucks can pull heavy loads (have power) but cannot go fast. Gears cause this. Gears are generally selected and manufactured using standards established by American Gear Manufacturers Association (AGMA) and American National Standards Institute (ANSI). This course provides an outline of gear fundamentals and is beneficial to readers who want to acquire knowledge about mechanics of gears. The course is divided into 6 sections: Section -1 Gear Types, Characteristics and Applications Section -2 Gears Fundamentals Section -3 Power Transmission Fundamentals Section -4 Gear Trains Section -5 Gear Failure and Reliability Analysis Section -6 How to Specify and Select Gear Drives SECTION -1 GEAR TYPES, CHARACTERISTICS & APPLICATIONS The gears can be classified according to: 1. the position of shaft axes 2. -

EPICYCLIC GEARING and the ANTIKYTHERA MECHANISM PART II by M.T
EPICYCLIC GEARING AND THE ANTIKYTHERA MECHANISM PART II by M.T. Wright ART I of this article appeared in March scheme is familiar to students of complicated 2003.26 I withdrew the concluding part dial-work as one adopted where a ratio is desired Pbecause more refi ned data became available. that cannot conveniently be achieved by a I apologize to readers for the long-delayed fi xed-axis train alone, and I suggest that this is completion of the consequent revision. the reason for its introduction here. It is a little The Antikythera Mechanism, dateable startling to fi nd the application in so early an to the first century BC, is by far the oldest instrument, but arguably it is no more so than geared mechanism in the world. I began by the diff erential gear that it ‘supplants’. showing that all earlier attempts to understand We know that one revolution of the input to it were vitiated by the acceptance of mistaken this train represented one tropical month, but arrangements described by Professor Derek Price, the poor state of preservation of the instrument on whose writing most readers’ understanding makes it hard to be sure what output period of the Mechanism is (directly or indirectly) was intended. Th e numbers of teeth in several based. I described how, working from new of the train wheels are uncertain and we cannot observations of the original artefact made by even be sure of the number of arbors on the the late Professor A.G. Bromley and myself, I epicyclic platform, while the remaining part of was able to correct one of Price’s errors and so the lower back dial off ers few direct clues as to to develop a new reconstruction of the dial on the function displayed on it. -

Lecture On: IC Engine Performance Test 1
Lecture on: IC Engine Performance Test 1. Power and Mechanical efficiency: Power developed at the output shaft is known as brake power (b.p.), b.p.= 2πNT where, T is Torque in Nm and N is rotational speed in revolutions per second T=WR W=9.81 × net mass (in kg) applied R=radius in m power developed in the combustion chamber is known as indicated power (i.p.). It forms the basis for evaluation of combustion efficiency or heat release in the cylinder. power utilised in overcoming friction is known as friction power (f.p.). f.p.=i.p.-b.p. Mechanical Efficiency= b.p./i.p.=b.p./(b.p.+f.p,) 2. Mean effective pressure and Torque: Hypothetical pressure acted upon the piston throughout the power stroke. 푛푒푡 푎푟푒푎 표푓 푛푑푐푎푡표푟 푑푎푔푟푎푚 푃 = 푚 푙푒푛푔푡ℎ 표푓 푛푑푐푎푡표푟 푑푎푔푟푎푚 ××푠푝푟푛푔 푐표푛푠푡푎푛푡 Indicated power per cylinder, i.p.=PimALN/n n= number of revolution required to complete one engine cycle (n=1 for two stroke engine, 2 for four stroke engine) For hit and miss governing, i.p./cylinder= Pim.A.L. × number of working strokes per second Brake power per cylinder, b.p.= 2πNT= PbmALN/n 푃 퐴퐿 1 Then, 푇 = 푏푚 × 푛 2휋 For same mep, larger engine produces more torque Higher mep, higher will be the power developed by the engine for a given displacement Mep is basis of comparison of relative performance of different engines horsepower of an engine is dependent on its size and speed 3. Specific output: It describes the efficiency of an engine in terms of the brake horsepower.