Shallow-Water Wave
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geology of Hawaii Reefs
11 Geology of Hawaii Reefs Charles H. Fletcher, Chris Bochicchio, Chris L. Conger, Mary S. Engels, Eden J. Feirstein, Neil Frazer, Craig R. Glenn, Richard W. Grigg, Eric E. Grossman, Jodi N. Harney, Ebitari Isoun, Colin V. Murray-Wallace, John J. Rooney, Ken H. Rubin, Clark E. Sherman, and Sean Vitousek 11.1 Geologic Framework The eight main islands in the state: Hawaii, Maui, Kahoolawe , Lanai , Molokai , Oahu , Kauai , of the Hawaii Islands and Niihau , make up 99% of the land area of the Hawaii Archipelago. The remainder comprises 11.1.1 Introduction 124 small volcanic and carbonate islets offshore The Hawaii hot spot lies in the mantle under, or of the main islands, and to the northwest. Each just to the south of, the Big Island of Hawaii. Two main island is the top of one or more massive active subaerial volcanoes and one active submarine shield volcanoes (named after their long low pro- volcano reveal its productivity. Centrally located on file like a warriors shield) extending thousands of the Pacific Plate, the hot spot is the source of the meters to the seafloor below. Mauna Kea , on the Hawaii Island Archipelago and its northern arm, the island of Hawaii, stands 4,200 m above sea level Emperor Seamount Chain (Fig. 11.1). and 9,450 m from seafloor to summit, taller than This system of high volcanic islands and asso- any other mountain on Earth from base to peak. ciated reefs, banks, atolls, sandy shoals, and Mauna Loa , the “long” mountain, is the most seamounts spans over 30° of latitude across the massive single topographic feature on the planet. -

The Emergence of Magnetic Skyrmions
The emergence of magnetic skyrmions During the past decade, axisymmetric two-dimensional solitons (so-called magnetic skyrmions) have been discovered in several materials. These nanometer-scale chiral objects are being proposed as candidates for novel technological applications, including high-density memory, logic circuits and neuro-inspired computing. Alexei N. Bogdanov and Christos Panagopoulos Research on magnetic skyrmions benefited from a cascade of breakthroughs in magnetism and nonlinear physics. These magnetic objects are believed to be nanometers-size whirling cylinders, embedded into a magnetically saturated state and magnetized antiparallel along their axis (Fig. 1). They are topologically stable, in the sense that they can’t be continuously transformed into homogeneous state. Being highly mobile and the smallest magnetic configurations, skyrmions are promising for applications in the emerging field of spintronics, wherein information is carried by the electron spin further to, or instead of the electron charge. Expectedly, their scientific and technological relevance is fueling inventive research in novel classes of bulk magnetic materials and synthetic architectures [1, 2]. The unconventional and useful features of magnetic skyrmions have become focus of attention in the science and technology Figure 1. Magnetic skyrmions are nanoscale spinning magnetic circles, sometimes teasingly called “magic knots” or “mysterious cylinders (a), embedded into the saturated state of ferromagnets (b). particles”. Interestingly, for a long time it remained widely In the skyrmion core, magnetization gradually rotates along radial unknown that the key “mystery” surrounding skyrmions is in the directions with a fixed rotation sense namely, from antiparallel very fact of their existence. Indeed, mathematically the majority of direction at the axis to a parallel direction at large distances from the physical systems with localized structures similar to skyrmions are center. -
This Content Is Prepared from Various Sources and Has Used the Study Material from Various Books, Internet Articles Etc
This content is prepared from various sources and has used the study material from various books, internet articles etc. The teacher doesn’t claim any right over the content, it’s originality and any copyright. It is given only to the students of PG course in Geology to study as a part of their curriculum. WAVES Waves and their properties. (a) Regular, symmetrical waves can be described by their height, wavelength, and period (the time one wavelength takes to pass a fixed point). (b) Waves can be classified according to their wave period. The scales of wave height and wave period are not linear, but logarithmic, being based on powers of 10. The variety and size of wind-generated waves are controlled by four principal factors: (1) wind velocity, (2) wind duration, (3) fetch, (4) original sea state. Significant Wave Height? What is the average height and what is the significant height? Wind-generated waves are progressive waves, because they travel (progress) across the sea surface. If you focus on the crest of a progressive wave, you can follow its path over time. But what actually is moving? The wave form obviously is moving, but what about the water just below the sea surface? Actually, two basic kinds of motions are associated with ocean waves: the forward movement of the wave form itself and the orbital motion of water particles beneath the wave. The motion of water particles beneath waves. (a) The arrows at the sea surface denote the motion of water particles beneath waves. With the passage of one wavelength, a water particle at the sea surface describes a circular orbit with a diameter equal to the wave’s height. -

Optimal Transient Growth in Thin-Interface Internal Solitary Waves
Under consideration for publication in J. Fluid Mech. 1 Optimal transient growth in thin-interface internal solitary waves PIERRE-YVESPASSAGGIA1, K A R L R. H E L F R I C H2y, AND B R I A N L. W H I T E1 1Department of Marine Sciences, University of North Carolina, Chapel Hill, NC 27599, USA 2Department of Physical Oceanography, Woods Hole Oceanographic Institution, Woods Hole, MA 02543, USA (Received 10 January 2018) The dynamics of perturbations to large-amplitude Internal Solitary Waves (ISW) in two-layered flows with thin interfaces is analyzed by means of linear optimal transient growth methods. Optimal perturbations are computed through direct-adjoint iterations of the Navier-Stokes equations linearized around inviscid, steady ISWs obtained from the Dubreil-Jacotin-Long (DJL) equation. Optimal perturbations are found as a func- tion of the ISW phase velocity c (alternatively amplitude) for one representative strat- ification. These disturbances are found to be localized wave-like packets that originate just upstream of the ISW self-induced zone (for large enough c) of potentially unsta- ble Richardson number, Ri < 0:25. They propagate through the base wave as coherent packets whose total energy gain increases rapidly with c. The optimal disturbances are also shown to be relevant to DJL solitary waves that have been modified by viscosity representative of laboratory experiments. The optimal disturbances are compared to the local WKB approximation for spatially growing Kelvin-Helmholtz (K-H) waves through the Ri < 0:25 zone. The WKB approach is able to capture properties (e.g., carrier fre- quency, wavenumber and energy gain) of the optimal disturbances except for an initial phase of non-normal growth due to the Orr mechanism. -
Tidal Effect Compensation System for Wave Energy Converters
TVE 11 036 Examensarbete 30 hp September 2011 Tidal Effect Compensation System for Wave Energy Converters Valeria Castellucci Institutionen för teknikvetenskaper Department of Engineering Sciences Abstract Tidal Effect Compensation System for Wave Energy Converters Valeria Castellucci Teknisk- naturvetenskaplig fakultet UTH-enheten Recent studies show that there is a correlation between water level and energy absorption values for wave energy converters: the absorption decreases when the Besöksadress: water levels deviate from average. The effect for the studied WEC version is evident Ångströmlaboratoriet Lägerhyddsvägen 1 for deviations greater then 25 cm, approximately. The real problem appears during Hus 4, Plan 0 tides when the water level changes significantly. Tides can compromise the proper functioning of the generator since the wire, which connects the buoy to the energy Postadress: converter, loses tension during a low tide and hinders the full movement of the Box 536 751 21 Uppsala translator into the stator during high tides. This thesis presents a first attempt to solve this problem by designing and realizing a small-scale model of a point absorber Telefon: equipped with a device that is able to adjust the length of the rope connected to the 018 – 471 30 03 generator. The adjustment is achieved through a screw that moves upwards in Telefax: presence of low tides and downwards in presence of high tides. The device is sized 018 – 471 30 00 to one-tenth of the full-scale model, while the small-scaled point absorber is dimensioned based on buoyancy's analysis and CAD simulations. Calculations of Hemsida: buoyancy show that the sensitive components will not be immersed during normal http://www.teknat.uu.se/student operation, while the CAD simulations confirm a sufficient mechanical strength of the model. -

Deep Ocean Wind Waves Ch
Deep Ocean Wind Waves Ch. 1 Waves, Tides and Shallow-Water Processes: J. Wright, A. Colling, & D. Park: Butterworth-Heinemann, Oxford UK, 1999, 2nd Edition, 227 pp. AdOc 4060/5060 Spring 2013 Types of Waves Classifiers •Disturbing force •Restoring force •Type of wave •Wavelength •Period •Frequency Waves transmit energy, not mass, across ocean surfaces. Wave behavior depends on a wave’s size and water depth. Wind waves: energy is transferred from wind to water. Waves can change direction by refraction and diffraction, can interfere with one another, & reflect from solid objects. Orbital waves are a type of progressive wave: i.e. waves of moving energy traveling in one direction along a surface, where particles of water move in closed circles as the wave passes. Free waves move independently of the generating force: wind waves. In forced waves the disturbing force is applied continuously: tides Parts of an ocean wave •Crest •Trough •Wave height (H) •Wavelength (L) •Wave speed (c) •Still water level •Orbital motion •Frequency f = 1/T •Period T=L/c Water molecules in the crest of the wave •Depth of wave base = move in the same direction as the wave, ½L, from still water but molecules in the trough move in the •Wave steepness =H/L opposite direction. 1 • If wave steepness > /7, the wave breaks Group Velocity against Phase Velocity = Cg<<Cp Factors Affecting Wind Wave Development •Waves originate in a “sea”area •A fully developed sea is the maximum height of waves produced by conditions of wind speed, duration, and fetch •Swell are waves -
Waves and Tides Properties of Ocean Waves • A
Waves and Tides Properties of Ocean Waves • A. Waves are the undulatory motion of a water surface. DRAW THIS! Properties of Ocean Waves • A. Waves are the undulatory motion of a water surface. – 1. Parts of a wave are: Wave crest, Wave trough, Wave height (H), Wavelength (L),and Wave period (T). Properties of Ocean Waves • B. Most of the waves present on the ocean’s surface are wind-generated waves. Properties of Ocean Waves • B. Most of the waves present on the ocean’s surface are wind-generated waves. – 1. Size and type of wind-generated waves are controlled by: Wind velocity, Wind duration, Fetch, and Original state of sea surface. Properties of Ocean Waves • B. Most of the waves present on the ocean’s surface are wind-generated waves. – 1. Size and type of wind-generated waves are controlled by: Wind velocity, Wind duration, Fetch, and Original state of sea surface. – 2. As wind velocity increases wavelength, period, and height increase, but only if wind duration and fetch are sufficient. Properties of Ocean Waves • B. Most of the waves present on the ocean’s surface are wind-generated waves. – 1. Size and type of wind-generated waves are controlled by: Wind velocity, Wind duration, Fetch, and Original state of sea surface. – 2. As wind velocity increases wavelength, period, and height increase, but only if wind duration and fetch are sufficient. – 3. Fully developed sea is when the waves generated by the wind are as large as they can be under current conditions of wind velocity and fetch. Wave Motions • C. -
A Quick Tutorial on WAVES Keith Meldahl Wave Height: the Vertical Distance from the Trough (Low Point) to the Crest (High Point) of a Wave, Measured in Feet Or Meters
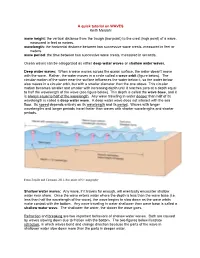
A quick tutorial on WAVES Keith Meldahl wave height: the vertical distance from the trough (low point) to the crest (high point) of a wave, measured in feet or meters. wavelength: the horizontal distance between two successive wave crests, measured in feet or meters. wave period: the time between two successive wave crests, measured in seconds. Ocean waves can be categorized as either deep water waves or shallow water waves. Deep water waves: When a wave moves across the ocean surface, the water doesn’t move with the wave. Rather, the water moves in a circle called a wave orbit (figure below). The circular motion of the water near the surface influences the water below it, so the water below also moves in a circular orbit, but with a smaller diameter than the one above. This circular motion becomes smaller and smaller with increasing depth until it reaches zero at a depth equal to half the wavelength of the wave (see figure below). This depth is called the wave base, and it is always equal to half of the wavelength. Any wave traveling in water deeper than half of its wavelength is called a deep water wave. A deep water wave does not interact with the sea floor. Its speed depends entirely on its wavelength and its period. Waves with longer wavelengths and longer periods travel faster than waves with shorter wavelengths and shorter periods. From Trujillo and Thurman, 2011, Essentials of Oceanography Shallow water waves: Any wave, if it travels far enough, will eventually encounter shallow water near shore. -

2. Coastal Processes
CHAPTER 2 2. Coastal processes Coastal landscapes result from by weakening the rock surface and driving nearshore sediment the interaction between coastal to facilitate further sediment transport processes. Wind and tides processes and sediment movement. movement. Biological, biophysical are also significant contributors, Hydrodynamic (waves, tides and biochemical processes are and are indeed dominant in coastal and currents) and aerodynamic important in coral reef, salt marsh dune and estuarine environments, (wind) processes are important. and mangrove environments. respectively, but the action of Weathering contributes significantly waves is dominant in most settings. to sediment transport along rocky Waves Information Box 2.1 explains the coasts, either directly through Ocean waves are the principal technical terms associated with solution of minerals, or indirectly agents for shaping the coast regular (or sinusoidal) waves. INFORMATION BOX 2.1 TECHNICAL TERMS ASSOCIATED WITH WAVES Important characteristics of regular, Natural waves are, however, wave height (Hs), which is or sinusoidal, waves (Figure 2.1). highly irregular (not sinusoidal), defined as the average of the • wave height (H) – the difference and a range of wave heights highest one-third of the waves. in elevation between the wave and periods are usually present The significant wave height crest and the wave trough (Figure 2.2), making it difficult to off the coast of south-west • wave length (L) – the distance describe the wave conditions in England, for example, is, on between successive crests quantitative terms. One way of average, 1.5m, despite the area (or troughs) measuring variable height experiencing 10m-high waves • wave period (T) – the time from is to calculate the significant during extreme storms. -

Wind Wave - Wikipedia 1 of 16
Wind wave - Wikipedia 1 of 16 Wind wave In fluid dynamics, wind waves, or wind-generated waves, are water surface waves that occur on the free surface of bodies of water. They result from the wind blowing over an area of fluid surface. Waves in the oceans can travel thousands of miles before reaching land. Wind waves on Earth range in size from small ripples, to waves over 100 ft (30 m) high.[1] When directly generated and affected by local waters, a Large wave wind wave system is called a wind sea. After the wind ceases to blow, wind waves are called swells. More generally, a swell consists of wind-generated waves that are not significantly affected by the local wind at that time. They have been generated elsewhere or some time ago.[2] Wind waves in the ocean are called ocean surface waves. Wind waves have a certain amount of randomness: Video of large waves from Hurricane Marie along the coast of Newport subsequent waves differ in height, duration, and shape Beach, California with limited predictability. They can be described as a stochastic process, in combination with the physics governing their generation, growth, propagation, and decay—as well as governing the interdependence between flow quantities such as: the water surface movements, flow velocities and water pressure. The key statistics of wind waves (both seas and swells) in evolving sea states can be predicted with wind wave models. Although waves are usually considered in the water seas Ocean waves of Earth, the hydrocarbon seas of Titan may also have wind-driven waves.[3] Contents Formation Types https://en.wikipedia.org/wiki/Wind_wave Wind wave - Wikipedia 2 of 16 Spectrum Shoaling and refraction Breaking Physics of waves Models Seismic signals See also References Scientific Other External links Formation The great majority of large breakers seen at a beach result from distant winds. -
First We Need to Know What Kinds of Movement There Are in the Ocean
THE OCEAN IS ALWAYS IN MOTION. WHY IS THIS IMPORTANT? First we need to know what kinds of movement there are in the ocean. Three Kinds of Water Movement I. Tides II. Waves III. Currents TIDES Tides are regular movement of the ocean, most noticeable at the shore line as the water moves further and further up the shore and then recedes. Much of the world has 2 a day but some places are somewhat different. Variation is caused by a number of factors, but the basic movement of the ocean’s water in tides remains the same. We have heard about them already, rather briefly when we mentioned the littoral or intertidal zones. The intertidal zone is the area that is covered and uncovered as the tides some in and out. But what causes that and what problems does it make? Caesar and tides in Britain When Caesar invaded Britain, his ships arrived at a high tide. The soldiers disembarked and when they wound up in a battle, they attempted to retreat onto the ships and leave. Unfortunately for them, the tide had “gone out” (ebbed) and the ships they had arrived in were now on the beach and not in the water. They had to continue fighting until the tide came in (flowed) and the ships were lifted back up and could sail away. Caesar was of course, familiar with the tides, but in the Mediterranean where they behave somewhat differently! Tides are classified in terms of whether they are high, low, spring or neap tides. The term “rip tide” is inaccurate in that what is being discussed there is a “rip current”. -
Wave Behavior Lab
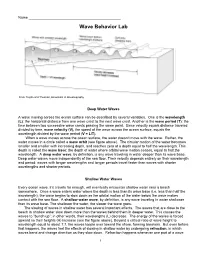
Name ______________________________________________ Wave Behavior Lab From Trujillo and Thurman, Essentials of Oceanography. Deep Water Waves A wave moving across the ocean surface can be described by several variables. One is the wavelength (L): the horizontal distance from one wave crest to the next wave crest. Another is the wave period (T): the time between two successive wave crests passing the same point. Since velocity equals distance traveled divided by time, wave velocity (V), the speed of the wave across the ocean surface, equals the wavelength divided by the wave period (V = L/T). When a wave moves across the ocean surface, the water doesn’t move with the wave. Rather, the water moves in a circle called a wave orbit (see figure above). The circular motion of the water becomes smaller and smaller with increasing depth, and reaches zero at a depth equal to half the wavelength. This depth is called the wave base: the depth of water where orbital wave motion ceases, equal to half the wavelength. A deep water wave, by definition, is any wave traveling in water deeper than its wave base. Deep water waves move independently of the sea floor. Their velocity depends entirely on their wavelength and period; waves with longer wavelengths and longer periods travel faster than waves with shorter wavelengths and shorter periods. Shallow Water Waves Every ocean wave, if it travels far enough, will eventually encounter shallow water near a beach somewhere. Once a wave enters water where the depth is less than its wave base (i.e. less than half the wavelength), the wave begins to slow down as the orbital motion of the water below the wave makes contact with the sea floor.