Torsion of Uniform Bars with Polygon Cross-Section
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Tilings Page 1
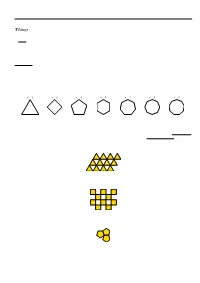
Survey of Math: Chapter 20: Tilings Page 1 Tilings A tiling is a covering of the entire plane with ¯gures which do not not overlap, and leave no gaps. Tilings are also called tesselations, so you will see that word often. The plane is in two dimensions, and that is where we will focus our examination, but you can also tile in one dimension (over a line), in three dimensions (over a space) and mathematically, in even higher dimensions! How cool is that? Monohedral tilings use only one size and shape of tile. Regular Polygons A regular polygon is a ¯gure whose sides are all the same length and interior angles are all the same. n 3 n 4 n 5 n 6 n 7 n 8 n 9 Equilateral Triangle, Square, Pentagon, Hexagon, n-gon for a regular polygon with n sides. Not all of these regular polygons can tile the plane. The regular polygons which do tile the plane create a regular tiling, and if the edge of a tile coincides entirely with the edge of a bordering tile, it is called an edge-to-edge tiling. Triangles have an edge to edge tiling: Squares have an edge to edge tiling: Pentagons don't have an edge to edge tiling: Survey of Math: Chapter 20: Tilings Page 2 Hexagons have an edge to edge tiling: The other n-gons do not have an edge to edge tiling. The problem with the ones that don't (pentagon and n > 6) has to do with the angles in the n-gon. -

Three-Dimensional Antipodaland Norm-Equilateral Sets
Pacific Journal of Mathematics THREE-DIMENSIONAL ANTIPODAL AND NORM-EQUILATERAL SETS ACHILL SCHURMANN¨ AND KONRAD J. SWANEPOEL Volume 228 No. 2 December 2006 PACIFIC JOURNAL OF MATHEMATICS Vol. 228, No. 2, 2006 THREE-DIMENSIONAL ANTIPODAL AND NORM-EQUILATERAL SETS ACHILL SCHÜRMANN AND KONRAD J. SWANEPOEL We characterize three-dimensional spaces admitting at least six or at least seven equidistant points. In particular, we show the existence of C∞ norms on ޒ3 admitting six equidistant points, which refutes a conjecture of Lawlor and Morgan (1994, Pacific J. Math. 166, 55–83), and gives the existence of energy-minimizing cones with six regions for certain uniformly convex norms on ޒ3. On the other hand, no differentiable norm on ޒ3 admits seven equidistant points. A crucial ingredient in the proof is a classification of all three-dimensional antipodal sets. We also apply the results to the touching numbers of several three-dimensional convex bodies. 1. Preliminaries Let conv S, int S, bd S denote the convex hull, interior and boundary of a subset S of the n-dimensional real space ޒn. Define A + B := {a + b : a ∈ A, b ∈ B}, λA := {λa : a ∈ A}, A − B := A +(−1)B, x ± A = A ± x := {x}± A. Denote lines and planes by abc and de, triangles and segments by 4abc := conv{a, b, c} and [de] := conv{d, e}, and the Euclidean length of [de] by |de|. Denote the Euclidean inner product by h · , · i.A convex body C ⊂ ޒn is a compact convex set with nonempty interior. The polar of a convex body C is the convex body C∗ := {x ∈ ޒn : hx, yi ≤ 1 for all y ∈ C}. -
Areas of Regular Polygons Finding the Area of an Equilateral Triangle
Areas of Regular Polygons Finding the area of an equilateral triangle The area of any triangle with base length b and height h is given by A = ½bh The following formula for equilateral triangles; however, uses ONLY the side length. Area of an equilateral triangle • The area of an equilateral triangle is one fourth the square of the length of the side times 3 s s A = ¼ s2 s A = ¼ s2 Finding the area of an Equilateral Triangle • Find the area of an equilateral triangle with 8 inch sides. Finding the area of an Equilateral Triangle • Find the area of an equilateral triangle with 8 inch sides. 2 A = ¼ s Area3 of an equilateral Triangle A = ¼ 82 Substitute values. A = ¼ • 64 Simplify. A = • 16 Multiply ¼ times 64. A = 16 Simplify. Using a calculator, the area is about 27.7 square inches. • The apothem is the F height of a triangle A between the center and two consecutive vertices H of the polygon. a E G B • As in the activity, you can find the area o any regular n-gon by dividing D C the polygon into congruent triangles. Hexagon ABCDEF with center G, radius GA, and apothem GH A = Area of 1 triangle • # of triangles F A = ( ½ • apothem • side length s) • # H of sides a G B = ½ • apothem • # of sides • side length s E = ½ • apothem • perimeter of a D C polygon Hexagon ABCDEF with center G, This approach can be used to find radius GA, and the area of any regular polygon. apothem GH Theorem: Area of a Regular Polygon • The area of a regular n-gon with side lengths (s) is half the product of the apothem (a) and the perimeter (P), so The number of congruent triangles formed will be A = ½ aP, or A = ½ a • ns. -
Creating Triangle Meshes for the Finite Element Method
Creating Triangle Meshes for the Finite Element Method Shea Yonker Host: Chris Deotte Thursday, May 18th, 2017 11:00 AM AP&M 2402 Abstract When utilizing the finite element method in two dimensions, one requires a suitable mesh of the domain they wish to solve on. In this talk we will go over the term suitable, an in depth approach to arrive at this goal, and strategies for programming implementations. This talk will additionally demonstrate the workings behind the culmination of this research: a program which allows users to create 2D triangle meshes for any domain they desire. Our Goal! • We wish to construct a program that will allow a user to create a mesh of a self chosen number triangles out of any polygon skeleton of their choosing. Three Steps • From our initial skeleton we parse the shape into Fan triangles • We create additional triangles until our user specified Add number is reached • With the desired number of triangles how can we Improve make changes that will improve the overall mesh? Programming Objects Programming Objects 1 2 4 3 User S n V • T • T Fan • T Add • V Improve • V • n Fan Fan Process Overview -For each vertex i -For each non adjacent vertex j -See if a newline can be made joining point i and j -If so save it -Construct our T matrix New Line Violations Original Skeleton Other New Lines Outside the Shape New Line Object • Throughout this process we will wish to save all the eligible new lines that will not violate our original shape • This will be done with the nLine vector • Each pair represents the vertex numbers we wish to join Line Crossing Violations for a=1:numV a = 1; if (a==numV) while a < (size(nLine))-1 b=1; b = a+1; else q = nLine(1,a); b=a+1; r = nLine(1,b); end if ((q==i) && (r==j) intersection(a,b,i,j); || (q==j) && (r==i)) break; end Where intersection(A,B,C,D) returns true if the lines AB and CD intersect and false if not. -
MYSTERIES of the EQUILATERAL TRIANGLE, First Published 2010
MYSTERIES OF THE EQUILATERAL TRIANGLE Brian J. McCartin Applied Mathematics Kettering University HIKARI LT D HIKARI LTD Hikari Ltd is a publisher of international scientific journals and books. www.m-hikari.com Brian J. McCartin, MYSTERIES OF THE EQUILATERAL TRIANGLE, First published 2010. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, without the prior permission of the publisher Hikari Ltd. ISBN 978-954-91999-5-6 Copyright c 2010 by Brian J. McCartin Typeset using LATEX. Mathematics Subject Classification: 00A08, 00A09, 00A69, 01A05, 01A70, 51M04, 97U40 Keywords: equilateral triangle, history of mathematics, mathematical bi- ography, recreational mathematics, mathematics competitions, applied math- ematics Published by Hikari Ltd Dedicated to our beloved Beta Katzenteufel for completing our equilateral triangle. Euclid and the Equilateral Triangle (Elements: Book I, Proposition 1) Preface v PREFACE Welcome to Mysteries of the Equilateral Triangle (MOTET), my collection of equilateral triangular arcana. While at first sight this might seem an id- iosyncratic choice of subject matter for such a detailed and elaborate study, a moment’s reflection reveals the worthiness of its selection. Human beings, “being as they be”, tend to take for granted some of their greatest discoveries (witness the wheel, fire, language, music,...). In Mathe- matics, the once flourishing topic of Triangle Geometry has turned fallow and fallen out of vogue (although Phil Davis offers us hope that it may be resusci- tated by The Computer [70]). A regrettable casualty of this general decline in prominence has been the Equilateral Triangle. Yet, the facts remain that Mathematics resides at the very core of human civilization, Geometry lies at the structural heart of Mathematics and the Equilateral Triangle provides one of the marble pillars of Geometry. -

Polyhedra on an Equilateral Hyperboloid
Bridges 2012: Mathematics, Music, Art, Architecture, Culture Polyhedra on an equilateral hyperboloid Dirk Huylebrouck Sint-Lucas Department for Architecture Paleizenstraat 65, 1030 Brussels, Belgium E-mail: [email protected] Abstract The paper gives examples of polyhedra inscribed in a (equilateral) hyperboloid, because this surface can be seen as negative curvature counterpart of a sphere. There is a historical argument: Kepler used polyhedra inscribed in spheres as a model for the orbits of planets, and so, since many comets follow a hyperbolic path, their orbits might be compared to polyhedra in hyperboloids. Thus, square, penta-, hexa- and heptagrammic crossed prisms are proposed, as well as an (extended) ‘hyperbolic cuboctahedron’ with a recognizable hourglass aspect. The approach is not exhaustive, but it might nevertheless inspire poetic mathematicians to develop a ‘Comet Mysterium’, or artists to make creations using the hyperboloid. Kepler’s Mysterium for Comets Around 1600 Johannes Kepler described the distance relationships between the planets in terms of the Platonic solids. Approximately, planets move in orbits enclosed in spheres and as the latter also circumscribe the classical polyhedra, it seemed an ingenious concept to link the five Platonic solids to the six planets known at that time. Today, we know there are more than six planets, but Kepler’s ‘Mysterium Cosmographicum’ remains an inspiring model: many comets follow a hyperbolic path, and thus the present paper proposes models with vertices on a hyperboloid. Some poetic mathematicians might feel inspired to develop a ‘Comet Mysterium’ (see fig. 1). Figure 1: Kepler’s model on an Austrian coin (left); if Jupiter and Saturn would fit in Kepler’s spherical model (middle), some comets might fit in a similar hyperboloid model (right). -

In a 45°-45°-90° Triangle, the Legs Are Congruent
8-3 Special Right Triangles Find x. 1. 3. SOLUTION: SOLUTION: In a 45°-45°-90° triangle, the legs are congruent ( In a 45°-45°-90° triangle, the legs are congruent ( = ) and the length of the hypotenuse h is times = ) and the length of the hypotenuse h is times the length of a leg . the length of a leg . Therefore, since the side length ( ) is 5, then Therefore, since , then . ANSWER: Simplify: ANSWER: 2. 22 SOLUTION: In a 45°-45°-90° triangle, the legs are congruent ( = ) and the length of the hypotenuse h is times the length of a leg . Therefore, since the hypotenuse (h) is 14, then Solve for x. ANSWER: eSolutions Manual - Powered by Cognero Page 1 8-3 Special Right Triangles Find x and y. 4. 5. SOLUTION: In a 30°-60°-90° triangle, the length of the SOLUTION: hypotenuse h is 2 times the length of the shorter leg s In a 30°-60°-90° triangle, the length of the (2s) and the length of the longer leg is times hypotenuse h is 2 times the length of the shorter leg s the length of the shorter leg ( ). (2s) and the length of the longer leg is times the length of the shorter leg ( ). The length of the hypotenuse is the shorter leg is y, and the longer leg is x. Therefore, The length of the hypotenuse is x, the shorter leg is 7, and the longer leg is y. Therefore, Solve for y: ANSWER: ; Substitute and solve for x: ANSWER: ; eSolutions Manual - Powered by Cognero Page 2 8-3 Special Right Triangles the triangle into two smaller congruent 30-60-90 triangles. -

Hexagon - Wikipedia
12/2/2018 Hexagon - Wikipedia Hexagon In geometry, a hexagon (from Greek ἕξ hex, "six" and γωνία, gonía, "corner, angle") is a six sided polygon or 6-gon. The total Regular hexagon of the internal angles of any hexagon is 7 20°. Contents Regular hexagon Parameters Symmetry A2 and G2 groups Related polygons and tilings Hexagonal structures A regular hexagon Tesselations by hexagons Type Regular polygon Hexagon inscribed in a conic section Cyclic hexagon Edges and 6 vertices Hexagon tangential to a conic section Schläfli {6}, t{3} Equilateral triangles on the sides of an arbitrary hexagon symbol Skew hexagon Petrie polygons Coxeter diagram Convex equilateral hexagon Polyhedra with hexagons Symmetry Dihedral (D6), order Hexagons: natural and human-made group 2×6 See also Internal 120° References angle External links (degrees) Dual Self polygon https://en.wikipedia.org/wiki/Hexagon 1/18 12/2/2018 Hexagon - Wikipedia Regular hexagon Properties Convex, cyclic, equilateral, isogonal, A regular hexagon has Schläfli symbol {6}[1] and can also be constructed as a truncated equilateral triangle, t{3}, which isotoxal alternates two types of edges. A regular hexagon is defined as a hexagon that is both equilateral and equiangular. It is bicentric, meaning that it is both cyclic (has a circumscribed circle) and tangential (has an inscribed circle). The common length of the sides equals the radius of the circumscribed circle, which equals times the apothem (radius of the inscribed circle). All internal angles are 120 degrees. A regular hexagon has 6 rotational symmetries (rotational symmetry of order six) and 6 reflection symmetries (six lines of symmetry), making up the dihedral group D6 . -

Lesson 2: Construct an Equilateral Triangle
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 2 M1 GEOMETRY Lesson 2: Construct an Equilateral Triangle Student Outcomes . Students apply the equilateral triangle construction to more challenging problems. Students communicate mathematical concepts clearly and concisely. Lesson Notes Lesson 2 directly builds on the notes and exercises from Lesson 1. The continued lesson allows the class to review and assess understanding from Lesson 1. By the end of this lesson, students should be able to apply their knowledge of how to construct an equilateral triangle to more difficult constructions and to write clear and precise steps for these constructions. Students critique each other’s construction steps in the Opening Exercise; this is an opportunity to highlight Mathematical Practice 3. Through the critique, students experience how a lack of precision affects the outcome of a construction. Be prepared to guide the conversation to overcome student challenges, perhaps by referring back to the Euclid piece from Lesson 1 or by sharing personal writing examples. Remind students to focus on the vocabulary they are using in the directions because it becomes the basis of writing proofs as the year progresses. In the Exploratory Challenges, students construct three equilateral triangles, two of which share a common side. Allow students to investigate independently before offering guidance. As students attempt the task, ask them to reflect on the significance of the use of circles for the problem. Classwork Opening Exercise (5 minutes) Students should test each other’s instructions for the construction of an equilateral triangle. The goal is to identify errors in the instructions or opportunities to make the instructions more concise. -

Special Triangles Question # 26
1. Which of the following statements is true? A. A scalene triangle has three congruent sides. B. A scalene triangle has exactly two congruent sides. Special triangles C. An equilateral triangle has exactly two Question # 26 congruent sides. 4.1.1 Identify the attributes of D. An equilateral triangle is also an Isosceles special triangles (isosceles, triangle. equilateral, right) Test index worksheets Test index worksheets Last Return to Last slide test slide To do problems like these, you need to look at all the 2. Which of the following statements is true? answers, and know the definition of each type of special triangle listed, then select the correct one. A. A scalene triangle has two congruent sides. Scalene triangle – has no congruent sides. B. All angles in a scalene triangle are different. Isosceles triangle – at least 2 congruent sides. C. An equilateral triangle has exactly two congruent sides. Equilateral triangle – has 3 congruent sides. Also an equilateral triangle is also a equiangular triangle. D. An isosceles triangle is also an equilateral triangle. Right triangle – one angle is 90°. Acute triangle – all angles are less than 90°. Obtuse triangle – one angle is greater than 90°. Test index worksheets Test index worksheets Last Return to Last slide test slide Example: Which of the following statements is true? 3. Which of the following statements is true? A. A scalene triangle has no congruent sides. A. A scalene triangle has three congruent sides. True – a scalene triangle has no congruent sides. B. A scalene triangle has exactly two congruent B. A scalene triangle has exactly two congruent sides. -

Mass Distribution and Skewness for Passive Scalar Transport in Pipes with Polygonal and Smooth Cross-Sections
Mass distribution and skewness for passive scalar transport in pipes with polygonal and smooth cross-sections Manuchehr Aminian, Roberto Camassa, Richard M. McLaughlin Abstract We extend our previous results characterizing the loading properties of a diffusing passive scalar advected by a laminar shear flow in ducts and channels to more general cross-sectional shapes, including regular polygons and smoothed corner ducts originating from deformations of ellipses. For the case of the triangle, short time skewness is calculated exactly to be positive, while long-time asymptotics shows it to be negative. Monte-Carlo simulations confirm these predictions, and document the time scale for sign change. Interestingly, the equilateral triangle is the only regular polygon with this property, all other polygons possess positive skewness at all times, although this cannot cannot be proved on finite times due to the lack of closed form flow solutions for such geometries. Alternatively, closed form flow solutions can be constructed for smooth deformations of ellipses, and illustrate how both non-zero short time skewness and the possibility of multiple sign switching in time is unrelated to domain corners. Exact conditions relating the median and the skewness to the mean are developed which guarantee when the sign for the skewness implies front (back) loading properties of the evolving tracer distribution along the pipe. Short and long time asymptotics confirm this condition, and Monte-Carlo simulations verify this at all times. 1 Introduction Recently, we established the surprising role which the cross-sectional tube shape plays in establish- ing the symmetry properties of a diffusing passive scalar advected by a laminar shear flow [3, 4]. -

On Laves' Graph of Girth Ten
ON LAVES' GRAPH OF GIRTH TEN H. S. M. COXETER 1. Introduction. This note shows how a certain infinite graph of degree three, discovered by Laves in connection with crystal structure, can be in scribed (in sixteen ways, all alike) in an infinite regular skew polyhedron which has square faces, six at each vertex. One-eighth of the vertices of the poly hedron are vertices of the graph, and the three edges of the graph that meet at such a vertex are diagonals of alternate squares. Thus either diagonal of any face of the polyhedron can serve as an edge, and the whole graph can then be completed in a unique manner. The same graph is also derived, by the method of Frucht's paper (4), from the abstract group 2 2 2 2 5i 525i = S2, 52 5i52 = Si. 2. A regular skew polyhedron. In 1926, J. F. Pétrie discovered an infinite regular skew polyhedron which can be derived from the simple honeycomb of cubes {4, 3, 4} by taking all the vertices, all the edges, and half the squares (1, pp. 33-35; 2, p. 242; 6, p. 55, Fig. 4). This new regular polyhedron was named {4, 6 | 4} because it has square faces, six at each vertex, and square holes corresponding to the missing faces of the cubic honeycomb. The vertex figure of a cube {4, 3} is an equilateral triangle {3} (3, p. 16); the vertex figure of the cubic honeycomb {4,3,4} is an octahedron {3,4} (3, p. 68); and the vertex figure of the skew polyhedron {4, 6|4} is a skew hexagon which is a Petrie polygon of the octahedron (3, pp.