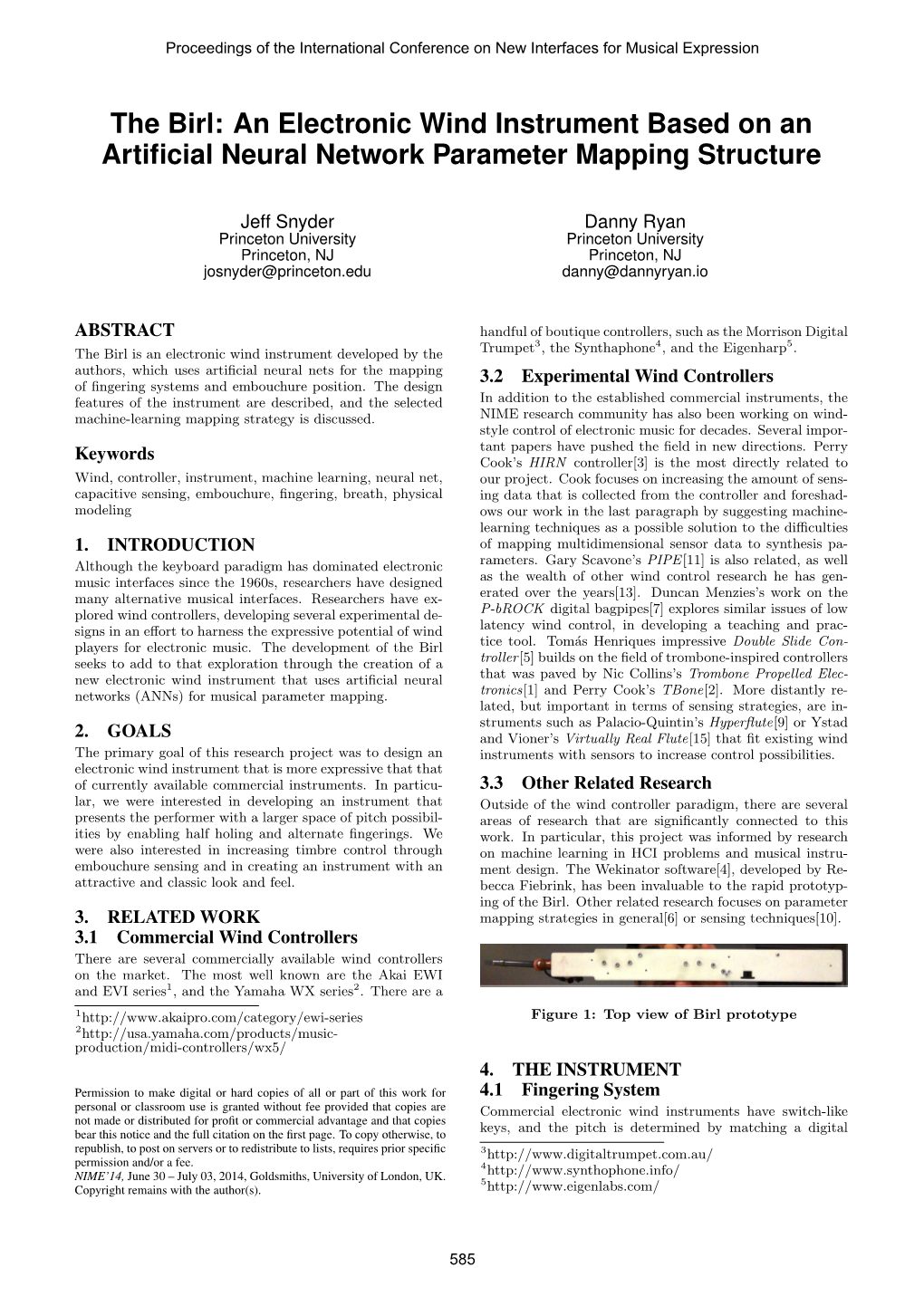
The Birl: an Electronic Wind Instrument Based on an Artificial
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intraoral Pressure in Ethnic Wind Instruments
Intraoral Pressure in Ethnic Wind Instruments Clinton F. Goss Westport, CT, USA. Email: [email protected] ARTICLE INFORMATION ABSTRACT Initially published online: High intraoral pressure generated when playing some wind instruments has been December 20, 2012 linked to a variety of health issues. Prior research has focused on Western Revised: August 21, 2013 classical instruments, but no work has been published on ethnic wind instruments. This study measured intraoral pressure when playing six classes of This work is licensed under the ethnic wind instruments (N = 149): Native American flutes (n = 71) and smaller Creative Commons Attribution- samples of ethnic duct flutes, reed instruments, reedpipes, overtone whistles, and Noncommercial 3.0 license. overtone flutes. Results are presented in the context of a survey of prior studies, This work has not been peer providing a composite view of the intraoral pressure requirements of a broad reviewed. range of wind instruments. Mean intraoral pressure was 8.37 mBar across all ethnic wind instruments and 5.21 ± 2.16 mBar for Native American flutes. The range of pressure in Native American flutes closely matches pressure reported in Keywords: Intraoral pressure; Native other studies for normal speech, and the maximum intraoral pressure, 20.55 American flute; mBar, is below the highest subglottal pressure reported in other studies during Wind instruments; singing. Results show that ethnic wind instruments, with the exception of ethnic Velopharyngeal incompetency reed instruments, have generally lower intraoral pressure requirements than (VPI); Intraocular pressure (IOP) Western classical wind instruments. This implies a lower risk of the health issues related to high intraoral pressure. -

Microphone-Based Electronic Wind Instrument by Feature Extraction from Breath Signals
MICROPHONE-BASED ELECTRONIC WIND INSTRUMENT BY FEATURE EXTRACTION FROM BREATH SIGNALS Francesco Bigoni Pelle Juul Christensen Rasmus Eklund Aalborg University – Copenhagen Aalborg University – Copenhagen Aalborg University – Copenhagen [email protected] [email protected] [email protected] Javier Molina Garcia Cumhur Erkut Aalborg University – Copenhagen Aalborg University – Copenhagen [email protected] [email protected] ABSTRACT of acoustic wind instruments to abstract synthesizers. Although the interfaces for electronic wind instruments An electronic wind instrument is an analog or digital went through many years of development and refinement, electronic instrument actuated by blowing onto an they are still disconnected from their acoustic counterparts electronic sensor. Through the history of electronic wind when it comes to sound production techniques. The instruments, the refinement of the physical interfaces has development of a ”good” saxophone sound requires a large not been followed by major innovations regarding breath degree of control over embouchure, reed pressure, air flow and embouchure detection: the industry is still largely and vocal tract configuration; extended techniques such as relying on pressure sensors for measuring air flow. We growling (singing into the horn while blowing), flutter- argue that many sound production techniques for acoustic tonguing (vibrating the false vocal folds while blowing) wind instruments depend on breath quality in addition and multiphonics (playing several tones at the -

A Study of the Effects of Playing a Wind Instrument on the Occlusion
A study of the effects of playing a wind instrument on the occlusion By Mr. Ektor Grammatopoulos BDS, MFDS RCPSG A thesis submitted to the faculty of Medicine and Dentistry of the University of Birmingham for the degree of Master of Philosophy Department of Orthodontics The Dental School St. Chad’s Queensway Birmingham B4 6NN December 2009 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. Abstract Objectives To investigate the effects of playing a wind instrument on the occlusion. Subjects and method This was a cross-sectional observational study. One hundred and seventy professional musicians were selected from twenty-one classical orchestras and organisations. The subjects were subdivided according to the type of instrument mouthpiece and included thirty-two large cup-shaped mouthpiece brass players (group A.L), forty-two small cup- shaped mouthpiece brass players (group A.S), thirty-seven single reed mouthpiece woodwind players (group B) and fifty-nine string and percussion instrument players (control group). Impressions were taken for each subject and various parameters were assessed from the study casts. Statistical analysis was undertaken for interval variables with one-way analysis of variance and for categorical variables with Chi-square tests. -

It's All Good
SEPTEMBER 2014—ISSUE 149 YOUR FREE GUIDE TO THE NYC JAZZ SCENE NYCJAZZRECORD.COM JASON MORAN IT’S ALL GOOD... CHARLIE IN MEMORIAMHADEN 1937-2014 JOE • SYLVIE • BOBBY • MATT • EVENT TEMPERLEY COURVOISIER NAUGHTON DENNIS CALENDAR SEPTEMBER 2014 BILLY COBHAM SPECTRUM 40 ODEAN POPE, PHAROAH SANDERS, YOUN SUN NAH TALIB KWELI LIVE W/ BAND SEPT 2 - 7 JAMES CARTER, GERI ALLEN, REGGIE & ULF WAKENIUS DUO SEPT 18 - 19 WORKMAN, JEFF “TAIN” WATTS - LIVE ALBUM RECORDING SEPT 15 - 16 SEPT 9 - 14 ROY HARGROVE QUINTET THE COOKERS: DONALD HARRISON, KENNY WERNER: COALITION w/ CHICK COREA & THE VIGIL SEPT 20 - 21 BILLY HARPER, EDDIE HENDERSON, DAVID SÁNCHEZ, MIGUEL ZENÓN & SEPT 30 - OCT 5 DAVID WEISS, GEORGE CABLES, MORE - ALBUM RELEASE CECIL MCBEE, BILLY HART ALBUM RELEASE SEPT 23 - 24 SEPT 26 - 28 TY STEPHENS (8PM) / REBEL TUMBAO (10:30PM) SEPT 1 • MARK GUILIANA’S BEAT MUSIC - LABEL LAUNCH/RECORD RELEASE SHOW SEPT 8 GATO BARBIERI SEPT 17 • JANE BUNNETT & MAQUEQUE SEPT 22 • LOU DONALDSON QUARTET SEPT 25 LIL JOHN ROBERTS CD RELEASE SHOW (8PM) / THE REVELATIONS SALUTE BOBBY WOMACK (10:30PM) SEPT 29 SUNDAY BRUNCH MORDY FERBER TRIO SEPT 7 • THE DIZZY GILLESPIE™ ALL STARS SEPT 14 LATE NIGHT GROOVE SERIES THE FLOWDOWN SEPT 5 • EAST GIPSY BAND w/ TIM RIES SEPT 6 • LEE HOGANS SEPT 12 • JOSH DAVID & JUDAH TRIBE SEPT 13 RABBI DARKSIDE SEPT 19 • LEX SADLER SEPT 20 • SUGABUSH SEPT 26 • BROWN RICE FAMILY SEPT 27 Facebook “f” Logo CMYK / .eps Facebook “f” Logo CMYK / .eps with Hutch or different things like that. like things different or Hutch with sometimes. -

The Composer's Guide to the Tuba
THE COMPOSER’S GUIDE TO THE TUBA: CREATING A NEW RESOURCE ON THE CAPABILITIES OF THE TUBA FAMILY Aaron Michael Hynds A Dissertation Submitted to the Graduate College of Bowling Green State University in partial fulfillment of the requirements for the degree of DOCTOR OF MUSICAL ARTS August 2019 Committee: David Saltzman, Advisor Marco Nardone Graduate Faculty Representative Mikel Kuehn Andrew Pelletier © 2019 Aaron Michael Hynds All Rights Reserved iii ABSTRACT David Saltzman, Advisor The solo repertoire of the tuba and euphonium has grown exponentially since the middle of the 20th century, due in large part to the pioneering work of several artist-performers on those instruments. These performers sought out and collaborated directly with composers, helping to produce works that sensibly and musically used the tuba and euphonium. However, not every composer who wishes to write for the tuba and euphonium has access to world-class tubists and euphonists, and the body of available literature concerning the capabilities of the tuba family is both small in number and lacking in comprehensiveness. This document seeks to remedy this situation by producing a comprehensive and accessible guide on the capabilities of the tuba family. An analysis of the currently-available materials concerning the tuba family will give direction on the structure and content of this new guide, as will the dissemination of a survey to the North American composition community. The end result, the Composer’s Guide to the Tuba, is a practical, accessible, and composer-centric guide to the modern capabilities of the tuba family of instruments. iv To Sara and Dad, who both kept me going with their never-ending love. -
Numerical Techniques for Acoustic Modelling and Design of Brass Wind Instruments
Comprehensive Summaries of Uppsala Dissertations from the Faculty of Science and Technology 862 Numerical Techniques for Acoustic Modelling and Design of Brass Wind Instruments BY DANIEL NORELAND ACTA UNIVERSITATIS UPSALIENSIS UPPSALA 2003 Preface. When H. Bouasse published his Instruments `aVentin two vol- umes in 1929–30, he set the starting point for what can be regarded as modern research on musical acoustics. Some 40 years later, the stock of published papers could be counted in their hundreds. However, it is only during the last two or three decades that our physical understanding, in combination with the devel- opment of computers, has made it possible to analyse wind instruments with the precision necessary, not only to explain the basic principles of their function, but also to be of practical use for instrument makers. This thesis deals with numerical methods and procedures for the analysis and design of acoustic horns of the kind found in brass instruments. The same models are applicable also to loudspeaker horns, with which one part of the thesis is concerned. Although the properties and merits of different systems for sound reproduc- tion, such as loudspeakers, are sometimes debated lively, it is at least possible to define an ideal system, in the sense that the sound at the position of the listener’s ears should be in as good agreement as possible with the sound at the position of the microphone in the concert hall during the recording. When speaking about optimisation of musical instruments, one has to be much more careful. The instruments of the modern western orchestra are the result of centuries of evolution, where tradition, musical ideals, performance tech- niques, and acoustical considerations have been inextricably intertwined with each other. -

The Noble Trumpet and Other Brass Instruments
OOK WORLD B Boekwêreld • Ilizwe Leencwadi a castle where walking sticks are common), even those who once Fanus often joked that his epitaph should read: ‘Nou is hy dood- were famous. ernstig’ (Now he is dead serious). Like all brilliant humourists, he It happened like this: I was asked to review Tien uit tien: stories seemed to have a need to be taken seriously, even if only once in en sêgoeters van Fanus Rautenbach (Tafelberg, 2010), a collection a while - for instance, Peter Sellers revealed that he wanted to be of stories by Fanus, edited by Danie Botha - which I did. I thought a serious actor. Imagine that! And most humourists suffered from nothing of it, except that he wrote some really good, original stories depression - humour is a ‘laugh with a tear’. But there was never and implemented unusual techniques. any evidence that Fanus Rautenbach was Then Botha asked me to visit the old man, who was pining for at- depressed, ever. Hopefully not too lonely tention. This was just before Christmas 2010. I was busy; could not either. even go out to Fanus maintained that humour Vredenburg to visit my Tiesj is one of two autobiographical is more than just cracking jokes. own mother. An acquaint- works by Rautenbach, the other being ance called. She would Fanus onthou en Sebastian lieg in die It is really about observing, set up a meeting. A coffee mou (met Piet Coetzer, Lapa, 2009). about knowing your subject shop near the ‘kieriekas- material, namely people. The teel’ in Claremont. Two With acknowledgement to Bolander. -

A Microtonal Wind Controller Building on Yamaha’S Technology to Facilitate the Performance of Music Based on the “19-EDO” Scale
Bailey, N., South, A., Evans, B. and Hair, G. (2016) A microtonal wind controller building on Yamaha’s technology to facilitate the performance of music based on the “19-EDO” scale. Scottish Music Review, 4(1), This is the author’s final accepted version. There may be differences between this version and the published version. You are advised to consult the publisher’s version if you wish to cite from it. http://eprints.gla.ac.uk/150676/ Deposited on: 27 October 2017 Enlighten – Research publications by members of the University of Glasgow http://eprints.gla.ac.uk w e i v e r A Microtonal Wind Controller c i Building on Yamaha’s Technology to Facilitate the s u Performance of Music based on the “19-EDO” scale. m h Nicholas J Bailey Alex South Bill Evans Graham Hair s i t t o c Abstract s We describe a project in which several collaborators adapted an existing instrument to make it capable of playing expressively in music based on the microtonal scale characterised by equal divsion of the octave into 19 tones (“19-EDO”). Our objective was not just to build this in- strument, however, but also to produce a well-formed piece of music which would exploit it idiomatically, in a performance which would provide listeners with a pleasurable and satisfying musical experience. Hence, consideration of the extent and limits of the playing-techniques of the resulting instrument (a “Wind-Controller”) and of appropriate approaches to the composi- tion of music for it were an integral part of the project from the start. -

The Keywi: an Expressive and Accessible Electronic Wind Instrument
The KeyWI: An Expressive and Accessible Electronic Wind Instrument Matthew Caren,a Romain Michon,a;b and Matthew Wrighta aCCRMA, Stanford University, USA bGRAME-CNCM, Lyon, France [email protected] ABSTRACT be used as a platform for development and be replicated by This paper presents the KeyWI, an electronic wind instru- anyone with access to sufficient tools. ment based on the melodica that improves upon limitations in current systems and is general and powerful enough to support a variety of applications. Four opportunities for growth are identified in current electronic wind instrument systems, which then are used to focus the development and evaluation of the instrument. The KeyWI features a breath pressure sensor with a large dynamic range, a keyboard that allows for polyphonic pitch selection, and a completely in- tegrated construction. Sound synthesis is performed with Faust code compiled to the Bela Mini, which offers low- latency audio and a simple yet powerful development work- flow. In order to be as accessible and versatile as possible, the hardware and software is entirely open-source, and fab- rication requires only common maker tools. Figure 1: A KeyWI (without cover), including a Author Keywords Bela Mini, custom PCB, enclosure, and sensors electronic wind instruments, breath controller, digital mu- sical instruments, development platform The KeyWI's design is based on the melodica, a handheld wind instrument where pitches are selected using a piano- style keyboard and dynamics are controlled by blowing into CCS Concepts a mouthpiece attached to the side of the instrument. •Applied computing ! Sound and music comput- The use of a keyboard as a pitch controller rather than the ing; Performing arts; •Hardware ! Sensor devices more common woodwind-key-inspired designs aims to be and platforms; accessible to users who may not have prior experience with the specialized fingerings required for wind instruments, as 1. -

Monterey Jazz Festival
DECEMBER 2018 VOLUME 85 / NUMBER 12 President Kevin Maher Publisher Frank Alkyer Editor Bobby Reed Reviews Editor Dave Cantor Contributing Editor Ed Enright Creative Director ŽanetaÎuntová Assistant to the Publisher Sue Mahal Bookkeeper Evelyn Oakes ADVERTISING SALES Record Companies & Schools Jennifer Ruban-Gentile Vice President of Sales 630-359-9345 [email protected] Musical Instruments & East Coast Schools Ritche Deraney Vice President of Sales 201-445-6260 [email protected] Advertising Sales Associate Grace Blackford 630-359-9358 [email protected] OFFICES 102 N. Haven Road, Elmhurst, IL 60126–2970 630-941-2030 / Fax: 630-941-3210 http://downbeat.com [email protected] CUSTOMER SERVICE 877-904-5299 / [email protected] CONTRIBUTORS Senior Contributors: Michael Bourne, Aaron Cohen, Howard Mandel, John McDonough Atlanta: Jon Ross; Austin: Kevin Whitehead; Boston: Fred Bouchard, Frank- John Hadley; Chicago: John Corbett, Alain Drouot, Michael Jackson, Peter Margasak, Bill Meyer, Mitch Myers, Paul Natkin, Howard Reich; Denver: Norman Provizer; Indiana: Mark Sheldon; Iowa: Will Smith; Los Angeles: Earl Gibson, Todd Jenkins, Kirk Silsbee, Chris Walker, Joe Woodard; Michigan: John Ephland; Minneapolis: Robin James; Nashville: Bob Doerschuk; New Orleans: Erika Goldring, David Kunian, Jennifer Odell; New York: Alan Bergman, Herb Boyd, Bill Douthart, Ira Gitler, Eugene Gologursky, Norm Harris, D.D. Jackson, Jimmy Katz, Jim Macnie, Ken Micallef, Dan Ouellette, Ted Panken, Richard Seidel, Tom Staudter, Jack Vartoogian, Michael Weintrob; -

Eolos: a Wireless MIDI Wind Controller
Eolos: a wireless MIDI wind controller Juan Mariano Ramos Desarrollos Tecnológicos Aplicados a las Artes Escuela Universitaria de Artes – Universidad Nacional de Quilmes Buenos Aires, Argentina [email protected] ABSTRACT wireless operation, but retail at $8301 and $11302 (USD) This paper presents a description of the design and usage of respectively. Eolos' estimated total cost is less than $200 Eolos, a wireless MIDI wind controller. The main goal of Eolos (USD), although it's difficult to establish a precise value due to is to provide an interface that facilitates the production of music component availability, or even the fact that some parts were for any individual, regardless of their playing skills or previous hand crafted. musical knowledge. Its features are: open design, lower cost There are also many well documented non-commercial, open than commercial alternatives, wireless MIDI operation, or DIY related electronic wind instruments. An early initiative rechargeable battery power, graphical user interface, tactile which predates the MIDI era is the Electronic Valve Instrument keys, sensitivity to air pressure, left-right reversible design and (EVI) [3], created by Nyle Steiner in the 1970's, who later two FSR sensors. There is also a mention about its participation helped to design the Akai EWI. in the 1st Collaborative Concert over the Internet between Other more recent products include the Epipe [4] (which Argentina and Cuba "Tradición y Nuevas Sonoridades". features continuous tonehole coverage capacitive sensing), MiniWI3 (based on the EWI), or the CyberWhistle [2]. Eolos, in addition to common characteristics such as breath and finger Author Keywords sensing, features an open design that focuses on the ease of use NIME, Eolos, Wind, Wireless, MIDI Controller, Digital (both for novices and experienced wind players), a low building Musical Instrument cost, and offers a wireless MIDI communication. -

Making Music
Name: Date: Brass Instruments Quiz Class: 1. What do all brass instruments have in common? 6. What do the trumpet, tuba, and French horn have in a. They all have valves or keys common? b. They're all capable of reaching very high notes a. They're all considered natural brass instruments c. They're all made of brass b. They're rarely, if ever, made of brass d. They're all played by vibrating the lips c. They all originated in France d. They all have valves 2. Which of the following is a wind instrument? a. b. 7. How is a concert tuba different from a sousaphone? a. A tuba sits on a musician's lap; a sousaphone wraps around her b. A sousaphone sits on a musician's lap, a tuba wraps around her c. d. c. A sousaphone is played with a slide; a tuba is played with three valves d. A tuba is played with a slide; a sousaphone is played with three valves 3. Why do brass instruments have so many curves and 8. The tuba is considered a "bass instrument." What twists? can you infer about the meaning of this term? a. They allow players to hit different pitches a. It refers to any instrument whose pitch can be b. They make brass instruments easier to handle changed c. They prevent brass instruments from being played too b. It refers to any instrument that plays very low notes loudly c. It refers to any instrument that is very large d. They make brass instruments easier to master d.