Бвдгеж Зией Ев , ¡ ¦ ¥ ¢ Вбж and ¢ ¦!Еж" , Bonn, And
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

NORTH RHINE WESTPHALIA 10 REASONS YOU SHOULD VISIT in 2019 the Mini Guide
NORTH RHINE WESTPHALIA 10 REASONS YOU SHOULD VISIT IN 2019 The mini guide In association with Commercial Editor Olivia Lee Editor-in-Chief Lyn Hughes Art Director Graham Berridge Writer Marcel Krueger Managing Editor Tom Hawker Managing Director Tilly McAuliffe Publishing Director John Innes ([email protected]) Publisher Catriona Bolger ([email protected]) Commercial Manager Adam Lloyds ([email protected]) Copyright Wanderlust Publications Ltd 2019 Cover KölnKongress GmbH 2 www.nrw-tourism.com/highlights2019 NORTH RHINE-WESTPHALIA Welcome On hearing the name North Rhine- Westphalia, your first thought might be North Rhine Where and What? This colourful region of western Germany, bordering the Netherlands and Belgium, is perhaps better known by its iconic cities; Cologne, Düsseldorf, Bonn. But North Rhine-Westphalia has far more to offer than a smattering of famous names, including over 900 museums, thousands of kilometres of cycleways and a calendar of exciting events lined up for the coming year. ONLINE Over the next few pages INFO we offer just a handful of the Head to many reasons you should visit nrw-tourism.com in 2019. And with direct flights for more information across the UK taking less than 90 minutes, it’s the perfect destination to slip away to on a Friday and still be back in time for your Monday commute. Published by Olivia Lee Editor www.nrw-tourism.com/highlights2019 3 NORTH RHINE-WESTPHALIA DID YOU KNOW? Despite being landlocked, North Rhine-Westphalia has over 1,500km of rivers, 360km of canals and more than 200 lakes. ‘Father Rhine’ weaves 226km through the state, from Bad Honnef in the south to Kleve in the north. -

Sustainability Strategy for North Rhine-Westphalia
Ministry for Climate Protection, Environment, 1 Agriculture, Nature and Consumer Protection of the State of North Rhine-Westphalia Sustainability Strategy for North Rhine-Westphalia www.nachhaltigkeit.nrw.de www.umwelt.nrw.de 2 act now. working together towards sustainable development in NRW. ‹ to the table of contents 3 Inhalt Prime Minister Hannelore Kraft 4 C. Implementation of the NRW Act now – Minister Johannes Remmel 5 Sustainability Strategy 29 A. Fundamental Principles of Sustainable Development I. Structures for a Sustainable NRW 29 in North Rhine-Westphalia 6 II. Goals and indicators 30 I. Mission statement 6 III. Overarching implementation tools of the II. Sustainability as a guiding principle for NRW 6 NRW Sustainability Strategy 42 III. Specific challenges and state-specific policy areas D. Updates and Reporting 47 for North Rhine-Westphalia 8 I. Progress reports of the State Government on B. Current Focal Areas of Joint Sustainability the sustainability strategy 47 Policy in NRW 13 II. Sustainability indicator reports of IT.NRW 47 Focal area # 1: 13 III. Participatory mechanisms in the process of Climate Protection Plan 13 updating the strategy 47 Focal area # 2: 16 Green Economy Strategy 16 Annex to the Sustainability Strategy 48 Focal area # 3: 18 Biodiversity strategy 18 I. Indicator areas of the National Sustainability Focal area # 4: 19 Strategy (2014) 48 Sustainable financial policy 19 II. International goals for sustainable development – Focal area # 5: 20 Sustainable Development Goals (SDGs) 49 Sustainable development of urban areas and Communication around sustainability 49 neighborhoods and local mobility 20 Index Focal area # 6: 23 Demographic change and neighborhoods List of Abbreviations suited for the elderly 23 Focal area # 7: 27 State initiative „NRW hält zusammen … für ein Leben ohne Armut und Ausgrenzung“ [Together in NRW .. -

Germany Bonn Exchange
studyabroad University of Bonn Berlin Bonn, Germany Bonn The University of Florida’s College of Agriculture and Life Sciences welcomes all students to study in Bonn, Germany, for a semester or full academic year. Highlights • Students who have not completed at least two semesters of German language instruction must attend an intensive German language course Fast Facts before the start of the program. Founded: 1827 • This program is open to both undergraduates and graduates. Enrollment: 27,500, including • Languages of instruction: German and English (many electives are taught 3,800 international students in English) Schools: 7 • Required GPA: 3.0 Institutes and Centers: 11 Famous Alumni: Max Ernst, Karl Marx Location The Rhenish Friedrich-Wilhelms University of Bonn is considered to be one of Europe’s most important institutes of higher education. As a leading research university, the university has evolved into a truly prominent international institution. The birthplace of Beethoven, the University of Bonn has developed into a lively academic town and cultural center. The university’s alumni includes five Nobel Prize winners. Situated on the picturesque Rhine River, Bonn’s proximity to the centers of European politics enables residents to witness European history unfold before their eyes. Housing Students will be housed in single rooms in one of several student dorms located in different areas of town. Some rooms include a kitchenette and a private bathroom, while others have shared facilities. Residences are easily accessible by foot or public transportation. www.studyabroad.uni-bonn.de Contact Information UFIC Study Abroad Advisor: Program Coordinator: • See your assigned student Jess Mercier Dr. -

North Rhine-Westphalia (NRW) / India
Page 1 of 13 Consulate General of India Frankfurt *** General and Bilateral Brief- North Rhine-Westphalia (NRW) / India North Rhine-Westphalia, commonly shortened to NRW is the most populous state of Germany, with a population of approximately 18 million, and the fourth largest by area. It was formed in 1946 as a merger of the provinces of North Rhine and Westphalia, both formerly parts of Prussia, and the Free State of Lippe. Its capital is Düsseldorf; the largest city is Cologne. Four of Germany's ten largest cities—Cologne, Düsseldorf, Dortmund, and Essen— are located within the state, as well as the second largest metropolitan area on the European continent, Rhine-Ruhr. NRW is a very diverse state, with vibrant business centers, bustling cities and peaceful natural landscapes. The state is home to one of the strongest industrial regions in the world and offers one of the most vibrant cultural landscapes in Europe. Salient Features 1. Geography: The state covers an area of 34,083 km2 and shares borders with Belgium in the southwest and the Netherlands in the west and northwest. It has borders with the German states of Lower Saxony to the north and northeast, Rhineland-Palatinate to the south and Hesse to the southeast. Thinking of North Rhine-Westphalia also means thinking of the big rivers, of the grassland, the forests, the lakes that stretch between the Eifel hills and the Teutoburg Forest range. The most important rivers flowing at least partially through North Rhine-Westphalia include: the Rhine, the Ruhr, the Ems, the Lippe, and the Weser. -

The German Hans-Ertel Centre for Weather Research
HErZ The German Hans-Ertel Centre for Weather Research BY CLEMENS SIMMER, GERHARD ADRIAN, SARAH JONES, VOLKMAR WIRTH, MARTIN GÖBER, CATHY HOHENEggER, TIJANA JANJIC´, JAN KELLER, CHRISTIAN OHLWEIN, AXEL SEIFERT, SILKE TRÖMEL, THORSTEN ULBRICH, KATHRIN WAPLER, MARTIN WEISSMANN, JULIA KELLER, MATTHIEU MASBOU, STEFANIE MEILINGER, NICOLE RIß, ANNIKA SCHOMBURG, ARND VORMANN, AND CHRISTA WEINGÄRTNER German universities are partnering with the German Weather Service to more effectively link basic research and teaching in atmospheric sciences with the challenges of operational weather forecasting and climate monitoring. undamental research addressing the challenges www.dwd.de/ertel-zentrum) was established in 2011 of weather forecasting is required in order to as a virtual center that develops and organizes a last- Fsteadily improve the quality of weather forecasts ing cooperation along common research objectives and climate monitoring. The potential for such re- between the German Weather Service [Deutscher search to be translated into operational advances is Wetterdienst (DWD)] and German universities and increased significantly if carried out in collaboration research institutions. The focus of HErZ is on basic with the national meteorological and hydrometeo- research. The concept foresees that the knowledge rological service (NMHS; acronyms are listed in the and understanding gained through HErZ will be appendix) of the country in question. To this end, transitioned into operations over a time scale of about the Hans-Ertel Centre for Weather -
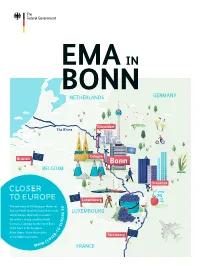
Closer to Europe — Tremendous Opportunities Close By: Germany Is Applying Interview – a Conversation with Bfarm Executive Director Prof
CLOSER TO EUROPE The new home of the European Medicines U E Agency (EMA) should be located centrally . E within Europe. Optimally accessible. P Set within a strong neigh bourhood. O R Germany is applying for the city of Bonn, U E at the heart of the European - O T Rhine Region, to be the location - R E of the EMA’s new home. S LO .C › WWW FOREWORD e — Federal Min öh iste Gr r o nn f H a e rm al e th CLOSER H TO EUROPE The German application is for a very European location: he EU 27 will encounter policy challenges Healthcare Products Regulatory Agency. The Institute Bonn. A city in the heart of Europe. Extremely close due to Brexit, in healthcare as in other ar- for Quality and Efficiency in Health Care located in T eas. A new site for the European Medicines nearby Cologne is Europe’s leading institution for ev- to Belgium, the Netherlands, France and Luxembourg. Agency (EMA) must be found. Within the idence-based drug evaluation. The Paul Ehrlich Insti- Situated within the tri-state nexus of North Rhine- EU, the organisation has become the primary centre for tute, which has 800 staff members and is located a mere drug safety – and therefore patient safety. hour and a half away from Bonn, contributes specific, Westphalia, Hesse and Rhineland-Palatinate. This is internationally acclaimed expertise on approvals and where the idea of a European Rhine Region has come to The EMA depends on close cooperation with nation- batch testing of biomedical pharmaceuticals and in re- life. -

Aircraft Noise-Induced Annoyance in the Vicinity of Cologne/Bonn Airport
Genehmigte Dissertation zur Erlangung des akademischen Grades Doctor rerum naturalium (Dr. rer. nat.) Fachbereich 3: Humanwissenschaften Institut für Psychologie Aircraft noise-induced annoyance in the vicinity of Cologne/Bonn Airport The examination of short-term and long-term annoyance as well as their major determinants vorgelegt von Dipl.-Psych. Susanne Bartels (geb. Stein) geboren in Burgstädt Darmstadt, 2014 Hochschulkennziffer: D 17 Eingereicht am 08. Juli 2014 Disputation am 15. September 2014 Referent: Prof. Dr. Joachim Vogt, Technische Universität Darmstadt Korreferent: Prof. Dr. Rainer Höger, Leuphana Universität Lüneburg Für Emil, meine liebste „Lärmquelle” Acknowledgment I would like to express my gratitude to all the people who were on hand with help and advice for me during my doctoral project in the past years. My thanks go to my doctorate supervisor Professor Joachim Vogt for his excellent mentoring, for the freedom in the choice of my research topics, and for his helpful advice during both the conduction of the studies and the writing of my dissertation. I thank Professor Rainer Höger of Leuphana University, Lüneburg for agreeing to serve as the second examiner of my thesis. Furthermore, I would like to express my appreciation to my (former) colleagues of the department of Flight Physiology of the German Aerospace Center (DLR) in Cologne. A thank you to Dr. Mathias Basner who appointed me as doctoral student and who, thereby, laid the foundation of this thesis. I also thank Dr. Uwe Müller for the good collaboration, his expertise and his merits as leader of the Work Package 2 in the COSMA-project. In addition, I would like to thank Eva Hennecke, Helene Majewski, Dr. -
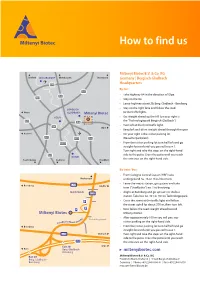
How to Find Us
How to find us Miltenyi Biotec B.V. & Co. KG Krefeld DÜSSELDORF Oberhausen Dortmund Germany | Bergisch Gladbach A 46 Headquarters By car: A 1 • Take highway A4 in the direction of Olpe. A 3 A 57 • Stay on the A4. • Leave highway at exit 20, Berg. Gladbach - Bensberg. • Stay on the right lane and follow the road BERGISCH Venlo GLADBACH Miltenyi Biotec to the traffic lights. KÖLN • Go straight ahead up the hill (on your right is A 61 the “Technologiepark Bergisch Gladbach”). A 4 • Turn left at the third traffic light. A 4 Olpe • Keep left and drive straight ahead through the gate. Aachen • On your right is the visitor parking lot A 1 A 59 A 3 (Besucherparkplatz). A 555 • From the visitor parking lot turn half left and go straight forward until you passed house 1. Turn right and take the steps on the right-hand A 61 side to the patio. Cross the patio until you reach BONN Saarbrücken Koblenz Frankfurt the entrance on the right-hand side. By train / bus: • From Cologne Central Station (HBF) take Herkenrath underground no. 16 or 18 to Neumarkt. • Leave the metro station, go upstairs and take Bensberg L 298 Lindlar tram (“Stadtbahn“) no. 1 to Bensberg. MOITZFELD L 195 • Alight at Bensberg and go upstairs to the bus station. Take bus no. 421 or 454 to Technologiepark. P • Cross the street at the traffic light and follow the street uphill for about 200 m, then turn left. P P • Now follow the road straight ahead toward Miltenyi Biotec Miltenyi Biotec. -

Bonn / Cologne / Düsseldorf
Information on the destination BONN / COLOGNE / DÜSSELDORF Bonn, Cologne & Düsseldorf invite you to enjoy an unforgettable trip to the Rhineland, a region which has not only a long cultural tradition, but has also achieved a global reputation in terms of both lifestyle and media. Bonn As the gateway to the romantic Rhine valley, the city of Bonn offers a unique blend of culture and nature, of Rhenish and international flair. The home of the UN in Germany, Bonn‘s historical sites dating from its years as the country‘s capital city today provide a unique conference infrastructure. The “museum mile“ combines German history, art and architecture in the form of highly regarded exhibitions, while the city centre, including the house where Beethoven was born, offers a relaxed atmosphere where visitors can shop, saunter and enjoy the culinary specialities. Cologne The cosmopolitan and dynamic media city on the Rhine is an international congress destination at the heart of Europe. Cologne‘s unique atmosphere is generated by its fascinating blend of Roman urban history and state-of-the-art conference facilities. Visitors can experience Cologne‘s warm welcome and be inspired by the attractive cultural offerings. The city boasts a world-class art scene, with over 40 museums, more than 110 galleries and countless ateliers. Düsseldorf Düsseldorf, the capital of the state of North Rhine-Westphalia, boasts the best quality of living in Germany and is a business destination with excellent transport connections. Experience the cosmopolitan charm, the famous Königsallee and the historical old town. The new MedienHafen offers a particularly cool and laid-back atmosphere. -

Download Programme
Language and Law in a World of Media, Globalisation and Social Conflicts Refounding the International Language and Law Association (ILLA) to make law more transparent September 7th – 9th, 2017, University of Freiburg, Germany Website: https://illa.online/relaunch-conference-2017 Conference Office: [email protected] Conference Programme (second draft, 27.04.2017) Wednesday, September 6th, 2017 (Pre-Conference Workshop) Time Subject 09:00 Workshop on “Forensic linguistics: new procedures and standards” - Chair: Carole E. Chaski (Georgetown, US), Victoria Guillén Nieto (Alicante, Spain), Hannes Kniffka (University of Bonn, Germany), Dieter Stein (Düsseldorf, Germany) 18:00 Location: “Liefmannhaus”, Goethestraße 33-35, 79100 Freiburg Paper presentation: Corpora 1) A Spanish Corpus for Forensic Linguistic Research Ángela Almela Sánchez-Lafuente (CUD-San Javier, Spain), Gema Alcaraz Mármol (Universidad de Castilla-La Mancha, Spain), Victoria Guillén Nieto (Universidad de Alicante, Spain), Arancha García Pinar (Universidad de Cartagena, Spain), Lourdes Cerezo García (Universidad de Murcia, Spain), Clara Pallejá López (Universidad de Murcia, Spain), Carole E. Chaski (Institute for Linguistic Evidence, US) 2) Differentiating the Language of Domestic Abusers Ángela Almela Sánchez-Lafuente (CUD-San Javier, Spain), Gema Alcaraz Mármol (Universidad de Castilla-La Mancha, Spain), Pascual Cantos Gomez (Universidad de Murcia, Spain), Carole E. Chaski (Institute for Linguistic Evidence, US) Style and Language 3) Style and Authorship Carole E. Chaski -

Global Trends Analysis
GLOBAL TRENDS ANALYSIS Michèle Roth & Cornelia Ulbert Cooperation in a Post-Western World: Challenges and future prospects 01 2018 DEAR READER, We are delighted to present this first issue in our new publication series GLOBAL TRENDS. ANALYSIS. The series links current developments to long- term trends, provides information about global interdependences and iden- tifies options for policy action. It thus follows on from GLOBAL TRENDS, published by the Development and Peace Foundation (sef:), Bonn, and the Uni- versity of Duisburg-Essen’s Institute for Development and Peace (INEF) from 1991 to 2015. Our contributors to this new series analyse the latest research findings and a wealth of facts and figures in order to fulfil our objective: to present complex issues in clear and readable text and graphics. IMPRINT GLOBAL TRENDS. ANALYSIS is our response to changing reading habits. It will appear more frequently, giving us a more visible presence, and will offer fresh Published by insights into a range of political topics in the fields of global governance, Stiftung Entwicklung und Frieden/ peace and security, sustainable development, the global economy and finance, Development and Peace Foundation (sef:) Dechenstr. 2, 53115 Bonn, Germany and the environment and natural resources. Bonn 2018 The series stands out for its openness to perspectives from different world Editorial Team regions. This is reflected in its international editorial team, which includes International members: Dr Adriana E. Abdenur (Instituto Igarapé, renowned academics and practitioners from Brazil, China, India, Lebanon and Rio de Janeiro), Professor Manjiao Chi (Xiamen University), South Africa. We are very pleased that they have kindly agreed to contribute. -

The Magellanic Clouds and Other Dwarf Galaxies
[0]USenglish german []austrian french []english USenglish german austrian french english german Bonn/Bochum-Graduiertenkolleg Workshop The Magellanic Clouds and Other Dwarf Galaxies Physikzentrum Bad Honnef, Germany 19th { 22nd January 1998 Edited by Tom Richtler & Jochen M. Braun Sternwarte der Universit¨at Bonn, Auf dem Hugel¨ 71, D–53121 Bonn, Federal Republic of Germany Shaker Verlag October 1998 Foreword by the Spokesman of the Graduiertenkolleg It is a great pleasure that the 25th meeting of our Graduate Working Group, which is being sup- ported now in its 6th year by the Deutsche Forschungsgemeinschaft, could become a significant international event. It is also gratifying to see this workshop as a harvest after 5 years of inten- sive work. The Graduate Working Group has seen a host of guest scientists who have visited in the framework of close collaboration, or gave lectures and seminars during the many previous meetings. This gathering of experts on galaxies, and particularly dwarf galaxies, represents a small milestone in the recent past of galaxy research at the Universities of Bonn and Bochum. Until the late 70’s, the investigation of dwarf galaxies was restricted to a few small groups. Although the Magellanic Clouds had been studied extensively due to their proximity, it took a while until the term dwarf galaxy became fashionable among astrophysicists. There are several reasons why dwarf galaxy research is one of today’s fastest growing branches of modern astro- physics. First, the Magellanic Clouds have always been appreciated as the ideal astrophysical laboratory in which one can study all kinds of processes without being hampered by distance and line-of-sight problems.