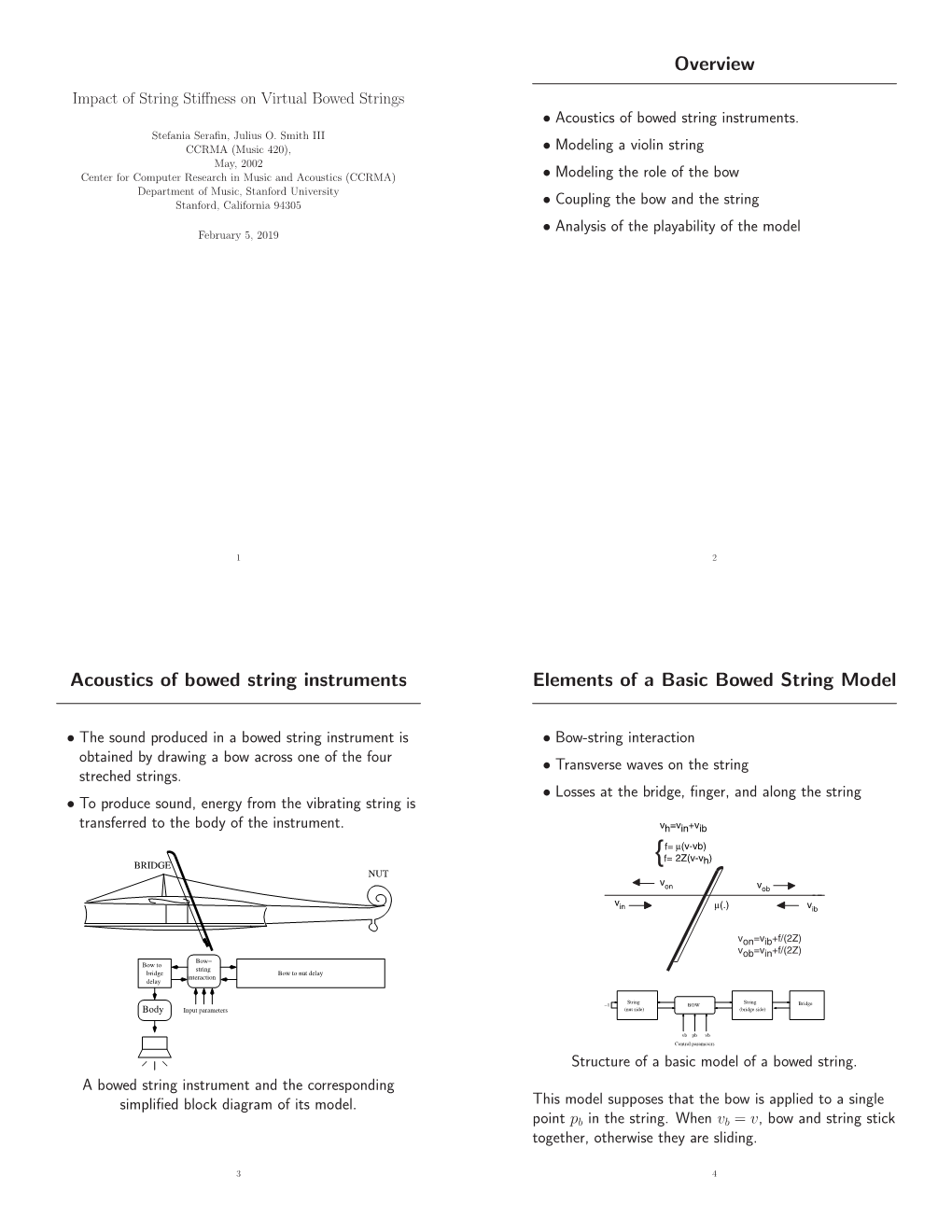
Overview Acoustics of Bowed String Instruments Elements of a Basic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rotational and Translational Waves in a Bowed String Eric Bavu, Manfred Yew, Pierre-Yves Pla•Ais, John Smith and Joe Wolfe
Proceedings of the International Symposium on Musical Acoustics, March 31st to April 3rd 2004 (ISMA2004), Nara, Japan Rotational and translational waves in a bowed string Eric Bavu, Manfred Yew, Pierre-Yves Pla•ais, John Smith and Joe Wolfe School of Physics, University of New South Wales, Sydney Australia [email protected] relative motion of the bow and string, and therefore the Abstract times of commencement of stick and slip phases, We measure and compare the rotational and transverse depends on both the transverse and torsional velocity velocity of a bowed string. When bowed by an (Fig 2). Consequently, torsional waves can introduce experienced player, the torsional motion is phase-locked aperiodicity or jitter to the motion of the string. Human to the transverse waves, producing highly periodic hearing is very sensitive to jitter [9]. Small amounts of motion. The spectrum of the torsional motion includes jitter contribute to a sound's being identified as 'natural' the fundamental and harmonics of the transverse wave, rather than 'mechanical'. Large amounts of jitter, on the with strong formants at the natural frequencies of the other hand, sound unmusical. Here we measure and torsional standing waves in the whole string. Volunteers compare translational and torsional velocities of a with no experience on bowed string instruments, bowed bass string and examine the periodicity of the however, often produced non-periodic motion. We standing waves. present sound files of both the transverse and torsional velocity signals of well-bowed strings. The torsional y string signal has not only the pitch of the transverse signal, but kink it sounds recognisably like a bowed string, probably because of its rich harmonic structure and the transients and amplitude envelope produced by bowing. -

The Science of String Instruments
The Science of String Instruments Thomas D. Rossing Editor The Science of String Instruments Editor Thomas D. Rossing Stanford University Center for Computer Research in Music and Acoustics (CCRMA) Stanford, CA 94302-8180, USA [email protected] ISBN 978-1-4419-7109-8 e-ISBN 978-1-4419-7110-4 DOI 10.1007/978-1-4419-7110-4 Springer New York Dordrecht Heidelberg London # Springer Science+Business Media, LLC 2010 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer ScienceþBusiness Media (www.springer.com) Contents 1 Introduction............................................................... 1 Thomas D. Rossing 2 Plucked Strings ........................................................... 11 Thomas D. Rossing 3 Guitars and Lutes ........................................................ 19 Thomas D. Rossing and Graham Caldersmith 4 Portuguese Guitar ........................................................ 47 Octavio Inacio 5 Banjo ...................................................................... 59 James Rae 6 Mandolin Family Instruments........................................... 77 David J. Cohen and Thomas D. Rossing 7 Psalteries and Zithers .................................................... 99 Andres Peekna and Thomas D. -

Standing Waves and Sound
Standing Waves and Sound Waves are vibrations (jiggles) that move through a material Frequency: how often a piece of material in the wave moves back and forth. Waves can be longitudinal (back-and- forth motion) or transverse (up-and- down motion). When a wave is caught in between walls, it will bounce back and forth to create a standing wave, but only if its frequency is just right! Sound is a longitudinal wave that moves through air and other materials. In a sound wave the molecules jiggle back and forth, getting closer together and further apart. Work with a partner! Take turns being the “wall” (hold end steady) and the slinky mover. Making Waves with a Slinky 1. Each of you should hold one end of the slinky. Stand far enough apart that the slinky is stretched. 2. Try making a transverse wave pulse by having one partner move a slinky end up and down while the other holds their end fixed. What happens to the wave pulse when it reaches the fixed end of the slinky? Does it return upside down or the same way up? Try moving the end up and down faster: Does the wave pulse get narrower or wider? Does the wave pulse reach the other partner noticeably faster? 3. Without moving further apart, pull the slinky tighter, so it is more stretched (scrunch up some of the slinky in your hand). Make a transverse wave pulse again. Does the wave pulse reach the end faster or slower if the slinky is more stretched? 4. Try making a longitudinal wave pulse by folding some of the slinky into your hand and then letting go. -

University of California Santa Cruz the Vietnamese Đàn
UNIVERSITY OF CALIFORNIA SANTA CRUZ THE VIETNAMESE ĐÀN BẦU: A CULTURAL HISTORY OF AN INSTRUMENT IN DIASPORA A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in MUSIC by LISA BEEBE June 2017 The dissertation of Lisa Beebe is approved: _________________________________________________ Professor Tanya Merchant, Chair _________________________________________________ Professor Dard Neuman _________________________________________________ Jason Gibbs, PhD _____________________________________________________ Tyrus Miller Vice Provost and Dean of Graduate Studies Table of Contents List of Figures .............................................................................................................................................. v Chapter One. Introduction ..................................................................................................................... 1 Geography: Vietnam ............................................................................................................................. 6 Historical and Political Context .................................................................................................... 10 Literature Review .............................................................................................................................. 17 Vietnamese Scholarship .............................................................................................................. 17 English Language Literature on Vietnamese Music -

Instrument Descriptions
RENAISSANCE INSTRUMENTS Shawm and Bagpipes The shawm is a member of a double reed tradition traceable back to ancient Egypt and prominent in many cultures (the Turkish zurna, Chinese so- na, Javanese sruni, Hindu shehnai). In Europe it was combined with brass instruments to form the principal ensemble of the wind band in the 15th and 16th centuries and gave rise in the 1660’s to the Baroque oboe. The reed of the shawm is manipulated directly by the player’s lips, allowing an extended range. The concept of inserting a reed into an airtight bag above a simple pipe is an old one, used in ancient Sumeria and Greece, and found in almost every culture. The bag acts as a reservoir for air, allowing for continuous sound. Many civic and court wind bands of the 15th and early 16th centuries include listings for bagpipes, but later they became the provenance of peasants, used for dances and festivities. Dulcian The dulcian, or bajón, as it was known in Spain, was developed somewhere in the second quarter of the 16th century, an attempt to create a bass reed instrument with a wide range but without the length of a bass shawm. This was accomplished by drilling a bore that doubled back on itself in the same piece of wood, producing an instrument effectively twice as long as the piece of wood that housed it and resulting in a sweeter and softer sound with greater dynamic flexibility. The dulcian provided the bass for brass and reed ensembles throughout its existence. During the 17th century, it became an important solo and continuo instrument and was played into the early 18th century, alongside the jointed bassoon which eventually displaced it. -

The Nonlinear Physics of Musical Instruments
Rep. Prog. Phys. 62 (1999) 723–764. Printed in the UK PII: S0034-4885(99)65724-4 The nonlinear physics of musical instruments N H Fletcher Research School of Physical Sciences and Engineering, Australian National University, Canberra 0200, Australia Received 20 October 1998 Abstract Musical instruments are often thought of as linear harmonic systems, and a first-order description of their operation can indeed be given on this basis, once we recognise a few inharmonic exceptions such as drums and bells. A closer examination, however, shows that the reality is very different from this. Sustained-tone instruments, such as violins, flutes and trumpets, have resonators that are only approximately harmonic, and their operation and harmonic sound spectrum both rely upon the extreme nonlinearity of their driving mechanisms. Such instruments might be described as ‘essentially nonlinear’. In impulsively excited instruments, such as pianos, guitars, gongs and cymbals, however, the nonlinearity is ‘incidental’, although it may produce striking aural results, including transitions to chaotic behaviour. This paper reviews the basic physics of a wide variety of musical instruments and investigates the role of nonlinearity in their operation. 0034-4885/99/050723+42$59.50 © 1999 IOP Publishing Ltd 723 724 N H Fletcher Contents Page 1. Introduction 725 2. Sustained-tone instruments 726 3. Inharmonicity, nonlinearity and mode-locking 727 4. Bowed-string instruments 731 4.1. Linear harmonic theory 731 4.2. Nonlinear bowed-string generators 733 5. Wind instruments 735 6. Woodwind reed generators 736 7. Brass instruments 741 8. Flutes and organ flue pipes 745 9. Impulsively excited instruments 750 10. -

Five Late Baroque Works for String Instruments Transcribed for Clarinet and Piano
Five Late Baroque Works for String Instruments Transcribed for Clarinet and Piano A Performance Edition with Commentary D.M.A. Document Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Musical Arts in the Graduate School of the The Ohio State University By Antoine Terrell Clark, M. M. Music Graduate Program The Ohio State University 2009 Document Committee: Approved By James Pyne, Co-Advisor ______________________ Co-Advisor Lois Rosow, Co-Advisor ______________________ Paul Robinson Co-Advisor Copyright by Antoine Terrell Clark 2009 Abstract Late Baroque works for string instruments are presented in performing editions for clarinet and piano: Giuseppe Tartini, Sonata in G Minor for Violin, and Violoncello or Harpsichord, op.1, no. 10, “Didone abbandonata”; Georg Philipp Telemann, Sonata in G Minor for Violin and Harpsichord, Twv 41:g1, and Sonata in D Major for Solo Viola da Gamba, Twv 40:1; Marin Marais, Les Folies d’ Espagne from Pièces de viole , Book 2; and Johann Sebastian Bach, Violoncello Suite No.1, BWV 1007. Understanding the capabilities of the string instruments is essential for sensitively translating the music to a clarinet idiom. Transcription issues confronted in creating this edition include matters of performance practice, range, notational inconsistencies in the sources, and instrumental idiom. ii Acknowledgements Special thanks is given to the following people for their assistance with my document: my doctoral committee members, Professors James Pyne, whose excellent clarinet instruction and knowledge enhanced my performance and interpretation of these works; Lois Rosow, whose patience, knowledge, and editorial wonders guided me in the creation of this document; and Paul Robinson and Robert Sorton, for helpful conversations about baroque music; Professor Kia-Hui Tan, for providing insight into baroque violin performance practice; David F. -

Chapter 5 Waves I: Generalities, Superposition & Standing Waves
Chapter 5 Waves I: Generalities, Superposition & Standing Waves 5.1 The Important Stuff 5.1.1 Wave Motion Wave motion occurs when the mass elements of a medium such as a taut string or the surface of a liquid make relatively small oscillatory motions but collectively give a pattern which travels for long distances. This kind of motion also includes the phenomenon of sound, where the molecules in the air around us make small oscillations but collectively give a disturbance which can travel the length of a college classroom, all the way to the students dozing in the back. We can even view the up–and–down motion of inebriated spectators of sports events as wave motion, since their small individual motions give rise to a disturbance which travels around a stadium. The mathematics of wave motion also has application to electromagnetic waves (including visible light), though the physical origin of those traveling disturbances is quite different from the mechanical waves we study in this chapter; so we will hold off on studying electromagnetic waves until we study electricity and magnetism in the second semester of our physics course. Obviously, wave motion is of great importance in physics and engineering. 5.1.2 Types of Waves In some types of wave motion the motion of the elements of the medium is (for the most part) perpendicular to the motion of the traveling disturbance. This is true for waves on a string and for the people–wave which travels around a stadium. Such a wave is called a transverse wave. This type of wave is the easiest to visualize. -

Class Summer Vacation, 2021-22 Subject
HOLIDAY HOMEWORK: Class 10 IG Summer Vacation, 2021-22 Subject : English Literature Time to be Spent One hour for fifteen days (Hours per day for ___ Days) : Work Read the text of Shakespeare’s Othello. Specification : Materials Hard copy or soft copy of the text of the drama Othello Required : Read the original text and the paraphrase. Make a presentation in about 15 slides . Some online resources are shared below: https://www.youtube.com/watch?v=2aRr6-XXAD8 Instructions / https://www.youtube.com/watch?v=95Vfcb7VvCA Guidelines : https://www.youtube.com/watch?v=Bp6LqSgukOU https://www.youtube.com/watch?v=lN4Kpj1PFKM https://www.youtube.com/watch?v=5z19M1A8MtY Any other Information: 1. List of the characters. 2. Theme of the drama 3. Act wise summary Date of Submission: 30th June 2021 ( you have to present your research in classroom) Head of the Department HOLIDAY HOMEWORK: Class 10 IG Summer Vacation, 2021-22 Subject : BUSINESS STUDIES (0450) Time to be Spent 6 Hours (1 ½ Hours per day for 4 Days) : Past papers for both components. Work Specification : Materials BUSINESS STUDIES (0450) TEXT BOOK Required : Students are expected to take printout of papers using the link: https://drive.google.com/file/d/1RJO1dBuq2eceLwKZ3ptolKL5JZP76rKW/view?usp=sharing Student should strictly avoid copying the answers from the books/ marking Instructions / scheme for their own benefit and well- being. Guidelines: Students are expected to take a print of all the papers given, get them spiral-bind and solve them in the space provided in the question paper itself and avoid taking extra sheet. Any other Information: Answers must fulfill all the criteria of assessment objectives. -
Basic String Instrument Care
Basic String Instrument Care When you get out the instrument: • When setting down a violin or viola, place the instrument on its back. Cellos should be laid on their side. Never place an instrument face-down, lying on the bridge. • Always hold the bow at the bottom or by the stick only. Do not touch the bow hair. When you put away the instrument: • Loosen the bow; failure to do this will warp the stick and wear out the bow hair faster. • Remove the sponge or shoulder rest from violins and violas; failure to do this could cause the bridge to fall or even crush the instrument • Always put away the instrument and bow when done practicing, making sure case is zipped/latched closed. Instruments stored safely are much less likely to suffer accidental damage. In general: • Never leave an instrument in an extreme environment. Rather than leaving your instrument in a car, even for a short period, take the instrument inside with you, no matter where you are. Excessive heat, cold, humidity, and dryness are all damaging to the wood string instruments are made of and the glue holding them together. They will crack, warp, and lose tone quality. • Unless you have prior skill, consult your teacher before attempting to tune the instrument. If you suspect a maintenance issue: • Always notify your teacher before taking action, even for simple cleaning or broken strings. They will recommend the best next steps. • Please do not attempt your own repairs. • We do not recommend any music shops in Seguin for repairs to CMA instruments. -

FOMRHI Quarterly 2 BULLETIN 43 15 Bulletin Supplement 17 Plans: Edinburgh University Collection 18 Plans and Books'
Elena Dal Coriivo No. 43 April 1986 FOMRHI Quarterly 2 BULLETIN 43 15 Bulletin Supplement 17 Plans: Edinburgh University collection 18 Plans and books'. S.A.M.I., Paris 20 Plan! Eerens tr aver so 23 Plan! Vienna quint bass recorder The Harley Foundation, Welbeck 24 COMMUNICATIONS 688- REVIEWS! The Sound of the Fortepiano! A Discography, by A. Basardj 695 Musical Instruments Through The Ages, ed M. Hamber & L. Stanners^ Music for Oboe 1650-1800, by B. Haynes? ...Maultrommel..,2, ed. F. Crane*, A Treatise...violin playing, by L. Mozart, trans. E. Knocker (paperback reissue)! Un Musee Aujourd'hui (exhibition cat.)! The Art of Fingering the Harpsichord, by N. Pasquali (facs. of 1757 print)? Musical and Poetical Relicks of the Welsh Bards, by E. Jones (facs. of 1784 print) J. Montagu 26 726 Changes at Prague G. Lyndon-Jones 16 696 Review! Piano i Norge, by P A Kjeldsberg O. Aanstad 34 697 New Grove DoMI! JM no. 4! further detailed comments J. Montagu 35 698 New Grove DoMI! ES no. 4! Ca to Ci entries E. Segerman 39 699 Are computers anything for us? C. Karp 46 700 (Computer Comms) M. Lyndon-Jones 52 701 On computers, typewriters etc. M. Champollion 53 702 (Non-keyboard baroque temperament) B. Haynes 56 703 A matter of temperament M. Hodgson 69 704 The proportional compass R. Gug 71 705 A simple and cheap hygrometer T. Bergstrrim 87 706 Digital and other calipers B. van Leeuwen 88 707 Modification and sharpening of twist drills B. van Leeuwen 89 708 De humidifiers H.Hope 89 709 ...Chitarra battente H.Hope 90 710 Vihuela H.Hope 90 711 An experimental method N. -
Primary—The Animated Orchestra Study Guide
17 Primary 18 Study Guide The Toronto Symphony Orchestra’s School Concerts are generously supported by Mrs. Gert Wharton and an anonymous donor. Table of Contents Concert Overview Concert Preparation Program Notes 3 4 - 6 7 - 10 Lesson Plans Artist Biographies Musical Terms Glossary 11 - 19 20 - 23 24 - 25 Instruments in Musicians Teacher & Student the Orchestra of the TSO Evaluation Forms 26 - 37 38 - 41 42 - 43 The Toronto Symphony Orchestra gratefully acknowledges Robin Malach for preparing the lesson plans included in this guide Concert Overview The Animated Orchestra Primary: Suitable for students in grades K–4 Dina Gilbert, conductor Greg Smith, narrator Join the TSO on an adventure where students discover the magic of music. Through storytelling and one-of-a-kind characters, students will be introduced to orchestral favourites that allow their imagination to soar. Meet a creative ferret named Ari who will tell the story of The Animated Orchestra with narrator Greg Smith. There will even be an audience sing-along where students get to perform alongside the TSO! Program to include excerpts from*: Georges Bizet Aragonaise from Carmen Suite No. 1 Traditional Mister Sun Audience Sing-Along Georges Bizet Les Toréadors from Carmen Suite No. 1 Greg Smith The Animated Orchestra *Program subject to change 3 Concert Preparation Let's Get Ready! Your class is coming to Roy Thomson Hall to see and hear the Toronto Symphony Orchestra! Here are some suggestions of what to do before, during, and after the performance. Whether it’s your first symphony concert or you’re a seasoned audience member, there’s always something new to learn and experience! Before Listen and Read Listen to the pieces of music • Have you heard any of these pieces before? • Which one is your favourite and why? • Do you hear anything new or interesting? • Try out one of our listening journals and record your observations.