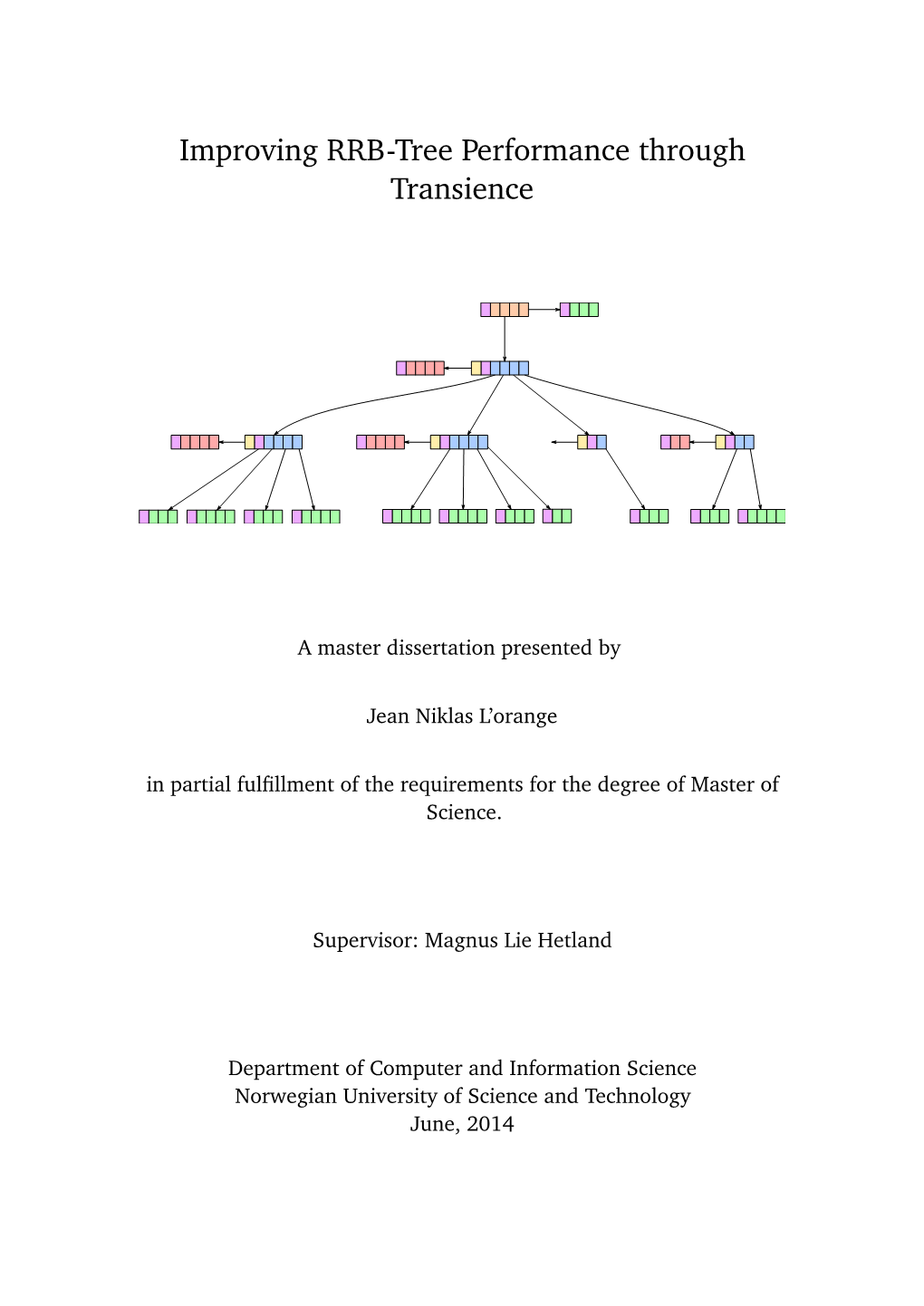
Improving RRB-Tree Performance Through Transience
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Advanced Data Structures
Advanced Data Structures PETER BRASS City College of New York CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521880374 © Peter Brass 2008 This publication is in copyright. Subject to statutory exception and to the provision of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published in print format 2008 ISBN-13 978-0-511-43685-7 eBook (EBL) ISBN-13 978-0-521-88037-4 hardback Cambridge University Press has no responsibility for the persistence or accuracy of urls for external or third-party internet websites referred to in this publication, and does not guarantee that any content on such websites is, or will remain, accurate or appropriate. Contents Preface page xi 1 Elementary Structures 1 1.1 Stack 1 1.2 Queue 8 1.3 Double-Ended Queue 16 1.4 Dynamical Allocation of Nodes 16 1.5 Shadow Copies of Array-Based Structures 18 2 Search Trees 23 2.1 Two Models of Search Trees 23 2.2 General Properties and Transformations 26 2.3 Height of a Search Tree 29 2.4 Basic Find, Insert, and Delete 31 2.5ReturningfromLeaftoRoot35 2.6 Dealing with Nonunique Keys 37 2.7 Queries for the Keys in an Interval 38 2.8 Building Optimal Search Trees 40 2.9 Converting Trees into Lists 47 2.10 -

Search Trees
Lecture III Page 1 “Trees are the earth’s endless effort to speak to the listening heaven.” – Rabindranath Tagore, Fireflies, 1928 Alice was walking beside the White Knight in Looking Glass Land. ”You are sad.” the Knight said in an anxious tone: ”let me sing you a song to comfort you.” ”Is it very long?” Alice asked, for she had heard a good deal of poetry that day. ”It’s long.” said the Knight, ”but it’s very, very beautiful. Everybody that hears me sing it - either it brings tears to their eyes, or else -” ”Or else what?” said Alice, for the Knight had made a sudden pause. ”Or else it doesn’t, you know. The name of the song is called ’Haddocks’ Eyes.’” ”Oh, that’s the name of the song, is it?” Alice said, trying to feel interested. ”No, you don’t understand,” the Knight said, looking a little vexed. ”That’s what the name is called. The name really is ’The Aged, Aged Man.’” ”Then I ought to have said ’That’s what the song is called’?” Alice corrected herself. ”No you oughtn’t: that’s another thing. The song is called ’Ways and Means’ but that’s only what it’s called, you know!” ”Well, what is the song then?” said Alice, who was by this time completely bewildered. ”I was coming to that,” the Knight said. ”The song really is ’A-sitting On a Gate’: and the tune’s my own invention.” So saying, he stopped his horse and let the reins fall on its neck: then slowly beating time with one hand, and with a faint smile lighting up his gentle, foolish face, he began.. -

The Random Access Zipper: Simple, Purely-Functional Sequences
The Random Access Zipper: Simple, Purely-Functional Sequences Kyle Headley and Matthew A. Hammer University of Colorado Boulder [email protected], [email protected] Abstract. We introduce the Random Access Zipper (RAZ), a simple, purely-functional data structure for editable sequences. The RAZ com- bines the structure of a zipper with that of a tree: like a zipper, edits at the cursor require constant time; by leveraging tree structure, relocating the edit cursor in the sequence requires log time. While existing data structures provide these time bounds, none do so with the same simplic- ity and brevity of code as the RAZ. The simplicity of the RAZ provides the opportunity for more programmers to extend the structure to their own needs, and we provide some suggestions for how to do so. 1 Introduction The singly-linked list is the most common representation of sequences for func- tional programmers. This structure is considered a core primitive in every func- tional language, and morever, the principles of its simple design recur througout user-defined structures that are \sequence-like". Though simple and ubiquitous, the functional list has a serious shortcoming: users may only efficiently access and edit the head of the list. In particular, random accesses (or edits) generally require linear time. To overcome this problem, researchers have developed other data structures representing (functional) sequences, most notably, finger trees [8]. These struc- tures perform well, allowing edits in (amortized) constant time and moving the edit location in logarithmic time. More recently, researchers have proposed the RRB-Vector [14], offering a balanced tree representation for immutable vec- tors. -

Design of Data Structures for Mergeable Trees∗
Design of Data Structures for Mergeable Trees∗ Loukas Georgiadis1; 2 Robert E. Tarjan1; 3 Renato F. Werneck1 Abstract delete(v): Delete leaf v from the forest. • Motivated by an application in computational topology, merge(v; w): Given nodes v and w, let P be the path we consider a novel variant of the problem of efficiently • from v to the root of its tree, and let Q be the path maintaining dynamic rooted trees. This variant allows an from w to the root of its tree. Restructure the tree operation that merges two tree paths. In contrast to the or trees containing v and w by merging the paths P standard problem, in which only one tree arc at a time and Q in a way that preserves the heap order. The changes, a single merge operation can change many arcs. merge order is unique if all node labels are distinct, In spite of this, we develop a data structure that supports which we can assume without loss of generality: if 2 merges and all other standard tree operations in O(log n) necessary, we can break ties by node identifier. See amortized time on an n-node forest. For the special case Figure 1. that occurs in the motivating application, in which arbitrary arc deletions are not allowed, we give a data structure with 1 an O(log n) amortized time bound per operation, which is merge(6,11) asymptotically optimal. The analysis of both algorithms is 3 2 not straightforward and requires ideas not previously used in 6 7 4 5 the study of dynamic trees. -

Bulk Updates and Cache Sensitivity in Search Trees
BULK UPDATES AND CACHE SENSITIVITY INSEARCHTREES TKK Research Reports in Computer Science and Engineering A Espoo 2009 TKK-CSE-A2/09 BULK UPDATES AND CACHE SENSITIVITY INSEARCHTREES Doctoral Dissertation Riku Saikkonen Dissertation for the degree of Doctor of Science in Technology to be presented with due permission of the Faculty of Information and Natural Sciences, Helsinki University of Technology for public examination and debate in Auditorium T2 at Helsinki University of Technology (Espoo, Finland) on the 4th of September, 2009, at 12 noon. Helsinki University of Technology Faculty of Information and Natural Sciences Department of Computer Science and Engineering Teknillinen korkeakoulu Informaatio- ja luonnontieteiden tiedekunta Tietotekniikan laitos Distribution: Helsinki University of Technology Faculty of Information and Natural Sciences Department of Computer Science and Engineering P.O. Box 5400 FI-02015 TKK FINLAND URL: http://www.cse.tkk.fi/ Tel. +358 9 451 3228 Fax. +358 9 451 3293 E-mail: [email protected].fi °c 2009 Riku Saikkonen Layout: Riku Saikkonen (except cover) Cover image: Riku Saikkonen Set in the Computer Modern typeface family designed by Donald E. Knuth. ISBN 978-952-248-037-8 ISBN 978-952-248-038-5 (PDF) ISSN 1797-6928 ISSN 1797-6936 (PDF) URL: http://lib.tkk.fi/Diss/2009/isbn9789522480385/ Multiprint Oy Espoo 2009 AB ABSTRACT OF DOCTORAL DISSERTATION HELSINKI UNIVERSITY OF TECHNOLOGY P.O. Box 1000, FI-02015 TKK http://www.tkk.fi/ Author Riku Saikkonen Name of the dissertation Bulk Updates and Cache Sensitivity in Search Trees Manuscript submitted 09.04.2009 Manuscript revised 15.08.2009 Date of the defence 04.09.2009 £ Monograph ¤ Article dissertation (summary + original articles) Faculty Faculty of Information and Natural Sciences Department Department of Computer Science and Engineering Field of research Software Systems Opponent(s) Prof. -

Biased Finger Trees and Three-Dimensional Layers of Maxima
Purdue University Purdue e-Pubs Department of Computer Science Technical Reports Department of Computer Science 1993 Biased Finger Trees and Three-Dimensional Layers of Maxima Mikhail J. Atallah Purdue University, [email protected] Michael T. Goodrich Kumar Ramaiyer Report Number: 93-035 Atallah, Mikhail J.; Goodrich, Michael T.; and Ramaiyer, Kumar, "Biased Finger Trees and Three- Dimensional Layers of Maxima" (1993). Department of Computer Science Technical Reports. Paper 1052. https://docs.lib.purdue.edu/cstech/1052 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. HlASED FINGER TREES AND THREE-DIMENSIONAL LAYERS OF MAXIMA Mikhnil J. Atallah Michael T. Goodrich Kumar Ramaiyer eSD TR-9J-035 June 1993 (Revised 3/94) (Revised 4/94) Biased Finger Trees and Three-Dimensional Layers of Maxima Mikhail J. Atallah" Michael T. Goodricht Kumar Ramaiyert Dept. of Computer Sciences Dept. of Computer Science Dept. of Computer Science Purdue University Johns Hopkins University Johns Hopkins University W. Lafayette, IN 47907-1398 Baltimore, MD 21218-2694 Baltimore, MD 21218-2694 mjalDcs.purdue.edu goodrich~cs.jhu.edu kumarlDcs . j hu. edu Abstract We present a. method for maintaining biased search trees so as to support fast finger updates (i.e., updates in which one is given a pointer to the part of the hee being changed). We illustrate the power of such biased finger trees by showing how they can be used to derive an optimal O(n log n) algorithm for the 3-dimcnsionallayers-of-maxima problem and also obtain an improved method for dynamic point location. -

December, 1990
DIMACS Technical Report 90-75 December, 1990 FULLY PERSISTENT LISTS WITH CATENATION James R. Driscolll Department of Mathematics and Computer Science Dartmouth College Hanover, New Hampshire 03755 Daniel D. K. Sleator2 3 School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Robert E. Tarjan4 5 Computer Science Department Princeton University Princeton, New Jersey 08544 and NEC Research Institute Princeton, New Jersey 08540 1 Supported in part by the NSF grant CCR-8809573, and by DARPA as monitored by the AFOSR grant AFOSR-904292 2 Supported in part by DIMACS 3 Supported in part by the NSF grant CCR-8658139 4 Permanent member of DIMACS 6 Supported in part by the Office of Naval Research contract N00014-87-K-0467 DIMACS is a cooperative project of Rutgers University, Princeton University, AT&T Bell Laboratories and Bellcore. DIMACS is an NSF Science and Technology Center, funded under contract STC-88-09648; and also receives support from the New Jersey Commission on Science and Technology. 1. Introduction In this paper we consider the problem of efficiently implementing a set of side-effect-free procedures for manipulating lists. These procedures are: makelist( d).- Create and return a new list of length 1 whose first and only element is d. first( X ) : Return the first element of list X. Pop(x): Return a new list that is the same as list X with its first element deleted. This operation does not effect X. catenate(X,Y): Return a new list that is the result of catenating list X and list Y, with X first, followed by Y (X and Y may be the same list). -

Handout 09: Suggested Project Topics
CS166 Handout 09 Spring 2021 April 13, 2021 Suggested Project Topics Here is a list of data structures and families of data structures we think you might find interesting topics for your research project. You're by no means limited to what's contained here; if you have another data structure you'd like to explore, feel free to do so! My Wish List Below is a list of topics where, each quarter, I secretly think “I hope someone wants to pick this topic this quarter!” These are data structures I’ve always wanted to learn a bit more about or that I think would be particularly fun to do a deep dive into. You are not in any way, shape, or form required to pick something from this list, and we aren’t offer- ing extra credit or anything like that if you do choose to select one of these topics. However, if any of them seem interesting to you, we’d be excited to see what you come up with over the quarter. • Bentley-Saxe dynamization (turning static data structures into dynamic data structures) • Bε-trees (a B-tree variant designed to minimize writes) • Chazelle and Guibas’s O(log n + k) 3D range search (fast range searches in 3D) • Crazy good chocolate pop tarts (deamortizing binary search trees) • Durocher’s RMQ structure (fast RMQ without the Method of Four Russians) • Dynamic prefix sum lower bounds (proving lower bounds on dynamic prefix parity) • Farach’s suffix tree algorithm (a brilliant, beautiful divide-and-conquer algorithm) • Geometric greedy trees (lower bounds on BSTs giving rise to a specific BST) • Ham sandwich trees (fast searches -

Data Structures and Algorithms for Data-Parallel Computing in a Managed Runtime
Data Structures and Algorithms for Data-Parallel Computing in a Managed Runtime THÈSE NO 6264 (2014) PRÉSENTÉE LE 1ER SEPTEMBRE 2014 À LA FACULTÉ INFORMATIQUE ET COMMUNICATIONS LABORATOIRE DE MÉTHODES DE PROGRAMMATION 1 PROGRAMME DOCTORAL EN INFORMATIQUE, COMMUNICATIONS ET INFORMATION ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE POUR L'OBTENTION DU GRADE DE DOCTEUR ÈS SCIENCES PAR Aleksandar PROKOPEC acceptée sur proposition du jury: Prof. O. N. A. Svensson, président du jury Prof. M. Odersky, directeur de thèse Prof. D. S. Lea, rapporteur Prof. V. Kuncak, rapporteur Prof. E. Meijer, rapporteur Suisse 2014 Go confidently in the direction of your dreams. Live the life you’ve imagined. — Thoreau To my parents and everything they gave me in this life. Acknowledgements Writing an acknowledgment section is a tricky task. I always feared omitting somebody really important here. Through the last few years, whenever I remembered a person that influenced my life in some way, I made a note to put that person here. I really hope I didn’t forget anybody important. And by important I mean: anybody who somehow contributed to me obtaining a PhD in computer science. So get ready – this will be a long acknowledgement section. If somebody feels left out, he should know that it was probably by mistake. Anyway, here it goes. First of all, I would like to thank my PhD thesis advisor Martin Odersky for letting me be a part of the Scala Team at EPFL during the last five years. Being a part of development of something as big as Scala was an amazing experience and I am nothing but thankful for it. -

Purely Functional Data Structures
Purely Functional Data Structures Kristjan Vedel November 18, 2012 Abstract This paper gives an introduction and short overview of various topics related to purely functional data structures. First the concept of persistent and purely functional data structures is introduced, followed by some examples of basic data structures, relevant in purely functional setting, such as lists, queues and trees. Various techniques for designing more efficient purely functional data structures based on lazy evaluation are then described. Two notable general-purpose functional data structures, zippers and finger trees, are presented next. Finally, a brief overview is given of verifying the correctness of purely functional data structures and the time and space complexity calculations. 1 Data Structures and Persistence A data structure is a particular way of organizing data, usually stored in memory and designed for better algorithm efficiency[27]. The term data structure covers different distinct but related meanings, like: • An abstract data type, that is a set of values and associated operations, specified independent of any particular implementation. • A concrete realization or implementation of an abstract data type. • An instance of a data type, also referred to as an object or version. Initial instance of a data structure can be thought of as the version zero and every update operation then generates a new version of the data structure. Data structure is called persistent if it supports access to all versions. [7] It's called partially persistent if all versions can be accessed, but only last version can be modified and fully persistent if every version can be both accessed and mod- ified. -

A Simplified and Dynamic Unified Structure
A Simpli¯ed and Dynamic Uni¯ed Structure Mihai B¸adoiu and Erik D. Demaine MIT Computer Science and Arti¯cial Intelligence Laboratory, 200 Technology Square, Cambridge, MA 02139, USA, fmihai,[email protected] Abstract. The uni¯ed property speci¯es that a comparison-based search structure can quickly ¯nd an element nearby a recently accessed element. Iacono [Iac01] introduced this property and developed a static search structure that achieves the bound. We present a dynamic search struc- ture that achieves the uni¯ed property and that is simpler than Iacono's structure. Among all comparison-based dynamic search structures, our structure has the best proved bound on running time. 1 Introduction The classic splay conjecture says that the amortized performance of splay trees [ST85] is within a constant factor of the optimal dynamic binary search tree for any given request sequence. This conjecture has motivated the study of sublog- arithmic time bounds that capture the performance of splay trees and other comparison-based data structures. For example, it is known that the perfor- mance of splay trees satis¯es the following two upper bounds. The working- set bound [ST85] says roughly that recently accessed elements are cheap to access again. The dynamic-¯nger bound [CMSS00,Col00] says roughly that it is cheap to access an element that is nearby the previously accessed element. These bounds are incomparable: one does not imply the other. For example, the access sequence 1; n; 1; n; 1; n; : : : has a small working-set bound (constant amortized time per access) because each accessed element was accessed just two time units ago. -

Suggested Final Project Topics
CS166 Handout 10 Spring 2019 April 25, 2019 Suggested Final Project Topics Here is a list of data structures and families of data structures we think you might find interesting topics for a final project. You're by no means limited to what's contained here; if you have another data structure you'd like to explore, feel free to do so! If You Liked Range Minimum Queries, Check Out… Range Semigroup Queries In the range minimum query problem, we wanted to preprocess an array so that we could quickly find the minimum element in that range. Imagine that instead of computing the minimum of the value in the range, we instead want to compute A[i] ★ A[i+1] ★ … ★ A[j] for some associative op- eration ★. If we know nothing about ★ other than the fact that it's associative, how would we go about solving this problem efficiently? Turns out there are some very clever solutions whose run- times involve the magical Ackermann inverse function. Why they're worth studying: If you really enjoyed the RMQ coverage from earlier in the quarter, this might be a great way to look back at those topics from a different perspective. You'll get a much more nuanced understanding of why our solutions work so quickly and how to adapt those tech- niques into novel settings. Lowest Common Ancestor and Level Ancestor Queries Range minimum queries can be used to solve the lowest common ancestors problem: given a tree, preprocess the tree so that queries of the form “what node in the tree is as deep as possible and has nodes u and v as descendants?” LCA queries have a ton of applications in suffix trees and other al- gorithmic domains, and there’s a beautiful connection between LCA and RMQ that gave rise to the first ⟨O(n), O(1)⟩ solution to both LCA and RMQ.