Human Trafficking Interdiction with Decision Dependent Success
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Rupani Rural Municipality Executive Office of Rural Municipal Rupani, Saptari
Rupani Rural Municipality Executive Office of Rural Municipal Rupani, Saptari BID DOCUMENT FOR SUPPLY AND DELIVERY OF JEEP(4WD) CONTRACT NO.: 01/2074/075 TENDER SUBMITTED BY: ................................................................. Abbreviations BDS...................... Bid Data Sheet BD ....................... Bidding Document DCS...................... Delivery and Completion Schedule DoR……………....Department of Roads DP ……………….Development Partner EQC ..................... Evaluation and Qualification Criteria GCC ..................... General Conditions of Contract GoN ..................... Government of Nepal ICC....................... International Chamber of Commerce IFB ....................... Invitation for Bids Incoterms.............. International Commercial Terms ITB ....................... Instructions to Bidders LGRS ................... List of Goods and Related Services NCB ……………. National Competitive Bidding PAN ……………..Permanent Account Number PPMO ……………Public Procurement Monitoring Office SBD...................... Standard Bidding Document SBQ...................... Schedule of Bidder Qualifications SCC……………. Special Conditions of Contract SR ...................... Schedule of Requirements TS......................... Technical Specifications UNCITRAL …….United Nations Commission on International Trade Law VAT …………… Value Added Tax Table of Contents Invitation for Bids…………………………………………………………………………2 PART 1 – Bidding Procedures Section I. Instructions to Bidders ............................................................................................... -

Coordinated Interconnection Transmission Planning and Operation: for Secure Reliable Grid Interconnection Between India- Nepal
South Asia Regional Initiative for Energy Integration (SARI/EI) Coordinated interconnection transmission planning and operation: For secure reliable Grid interconnection between India- Nepal by Mr. Vinod Kumar Agrawal, Technical Director and Rajiv Ratna Panda, Technical-Head SARI/EI/IRADe Workshop with Nepal stakeholders on “Enhancing Energy Cooperation between India- Nepal” 11.30 AM - 12.00 PM, 24th July 2019 at Nepal Electricity Authority, Kathmandu, Nepal Theme Presentation/Session-2/“Policies/Regulations and Institutional Mechanisms for Promoting Energy Cooperation & Cross Border Electricity Trade in South Asia”/ Regional Conference on Energy cooperation & Integration in South Asia-30th-31stAugust’20181Rajiv/Head-Technical/SARI/EI/IRADE Outline Hydro Power Potential and future Plan in Nepal. South Asia Cross Border Transmission Capacity by the year 2036/2040. RE capacity Deployment in India. Renewable Integration and Grid Balancing India-Nepal : Existing Cross Border Transmission Line and Future Plan Current Institutional Mechanisms for Coordination System Planning and operation. Regional Coordinated system planning –Institutional Mechanism Theme Presentation/Session-2/“Policies/Regulations and Institutional Mechanisms for Promoting Energy Cooperation & Cross Border Electricity Trade in South Asia”/ Regional Conference on Energy cooperation & Integration in South Asia-30th-31stAugust’2018Rajiv/Head-Technical/SARI/EI/IRADE Hydro Power Potential and future Plan in Nepal Theme Presentation/Session-2/“Policies/Regulations and Institutional -

Hospital (GNSH) Nepal
M Gajendra N Hospital (GNSH) Nepal -2 RT-PCR As Date: 2078 1. 6th 202',l. Age Refd. s.N. Case Name Gender District Municipality Ward Contact No. Lab lD Created At Result (Yrs) Hospital T 26 Female Saptari Saptakoshi 8 9848201584 Saptakoshi GNSH734AA 2O27-O7-14 12:56 Negative Shyam Kri. Dhamala Khaatri 2 Devika Ghimire 19 Female Saptari Saptakoshi 8 9842801584 Saptakoshi GNSH733AA 2O21-07-L4 12:38 Fn$lffi#d:, rN .=. ..,_.:uiiil 3 Roshni Kumari Malaha 12 Female Saptari Saptakoshi 10 9805909873 Saptakoshi GNSH732AA 2O2t-07-t4 12:04 Fdg1tl#s 4 Tanka Maya Dahal 62 Female Saptari Saptakoshi 1. 9852835451 Saptakoshi GNSH731AA 2O2L-O7-14 1.2:Ol F,$ iH 5 Dilli Prasad Acharya 35 Male Saptari Saptakoshi 4 9843007249 Saptakoshi GNSHT3OAA 2021,-O7 -L411.:59 Es-*iti+e: 6 Omkar Acharya 29 Male Saptari Saptakoshi 4 9843007249 Saptakoshi GNSH729AA 2O21,-07-L41.1.:57 f{}$itrv ,! ll 1 7 Bishwas Rai 17 Male Udayapur Belaka 9825794L8L Saptakoshi GNSH728AA 2O21,-07-L4 Ll:55 Negative 8 Junu Shrestha 28 Female Saptari Saptakoshi 1 9863908839 Saptakoshi GNSH727AA 2021-07-14 1l:47 Negative 9 Sher Bahadur Bista 73 Male Saptari Saptakoshi t 9819945811 Saptakoshi GNSH7264A 2021.-07-14 t1:44 10 Gita Raya 32 Female Saptari Saptakoshi L 9842282041, Saptakoshi GNSH725AA 2O2L-O7-L4 tL:41 Negative 1,L Rikha Thapa 55 Female Saptari Saptakoshi 1 9803895455 Saptakoshi GNSH724AA 2O2t-O7-14 11:39 72 Kritika Ghimire 20 Female Saptari Saptakoshi L 9862963895 Saptakoshi GNSH723AA 2O2t-O7-14'J.t:36 F.*'*1 -.$ ,,'.:ri 13 Susila ioshi 42 Female Saptari Saptakoshi 2 9a42a5331.2 Saptakoshi GNSH722AA 2OZT-O7-L4 tl:34 ffirX # iriri 'ii:' L4 Chandra Maya Magar 6L Female Sa pta ri Saptakoshi 2 9841500413 Saptakoshi GNSH721AA 2O21,-O7-141L:32 S, $ifit,C L5 Punam Karki Niraula 37 Female Saptari Saptakoshi L 9841688108 Saptakoshi GN5H72OAA 2027-O7-1411.:2L Negative 16 Aashma Basnet 22 Female Sa ptari Saptakoshi 1 9813053433 Saptakoshi GNSH719AA 2O21,-07-L4 LL:!S FsaiftC 17 Mahawati Sada 45 Female Saptari Saptakoshi 2 9808077816 Saptakoshi GNSH718AA 2O2\-O7-1.4 77:09 Sample Type:- Nasopharyngeal & Oropharyngeal Refd. -

Written Statement Submitted by the Asian Legal Resource Centre, A
United Nations A/HRC/32/NGO/54 General Assembly Distr.: General 2 June 2016 English only Human Rights Council Thirty-second session Agenda item 3 Promotion and protection of all human rights, civil, political, economic, social and cultural rights, including the right to development Written statement* submitted by the Asian Legal Resource Centre, a non-governmental organization in general consultative status The Secretary-General has received the following written statement which is circulated in accordance with Economic and Social Council resolution 1996/31. [30 May 2016] * This written statement is issued, unedited, in the language(s) received from the submitting non- governmental organization(s). GE.16-08925(E) A/HRC/32/NGO/54 NEPAL: Protests and extrajudicial executions still haunt Nepal’s Terai 1. The Asian Legal Resource Centre (ALRC) wishes to draw the attention of the UN Human Rights Council (UNHRC) to the excessive force used by the security forces in Nepal during the anti-Constitution protests from 16 August 2015 to 5 February 2016, in which over 40 people died. 2. The Asian Human Rights Commission (AHRC), sister organization to the ALRC, as well as the Terai Human Rights Defenders Alliance (THRD Alliance) investigated the protests and deaths in Tikapur (District Kailali), Birgunj (District Parsa), Janakpur (District Dhanusha), Jaleshwar (District Mahottari), Rajbiraj and Bhardaha (District Saptari), and Rangeli and Dainiya (District Morang). While not investigating two incidents in Tikapur (District Kailali) and Bhagawanpur (District Mahottari) in which protestors were responsible for the killing of 8 police personnel and one Armed Police Force (APF) officer, the AHRC/ALRC and THRD Alliance condemn these killings in the strongest terms. -
Food Insecurity and Undernutrition in Nepal
SMALL AREA ESTIMATION OF FOOD INSECURITY AND UNDERNUTRITION IN NEPAL GOVERNMENT OF NEPAL National Planning Commission Secretariat Central Bureau of Statistics SMALL AREA ESTIMATION OF FOOD INSECURITY AND UNDERNUTRITION IN NEPAL GOVERNMENT OF NEPAL National Planning Commission Secretariat Central Bureau of Statistics Acknowledgements The completion of both this and the earlier feasibility report follows extensive consultation with the National Planning Commission, Central Bureau of Statistics (CBS), World Food Programme (WFP), UNICEF, World Bank, and New ERA, together with members of the Statistics and Evidence for Policy, Planning and Results (SEPPR) working group from the International Development Partners Group (IDPG) and made up of people from Asian Development Bank (ADB), Department for International Development (DFID), United Nations Development Programme (UNDP), UNICEF and United States Agency for International Development (USAID), WFP, and the World Bank. WFP, UNICEF and the World Bank commissioned this research. The statistical analysis has been undertaken by Professor Stephen Haslett, Systemetrics Research Associates and Institute of Fundamental Sciences, Massey University, New Zealand and Associate Prof Geoffrey Jones, Dr. Maris Isidro and Alison Sefton of the Institute of Fundamental Sciences - Statistics, Massey University, New Zealand. We gratefully acknowledge the considerable assistance provided at all stages by the Central Bureau of Statistics. Special thanks to Bikash Bista, Rudra Suwal, Dilli Raj Joshi, Devendra Karanjit, Bed Dhakal, Lok Khatri and Pushpa Raj Paudel. See Appendix E for the full list of people consulted. First published: December 2014 Design and processed by: Print Communication, 4241355 ISBN: 978-9937-3000-976 Suggested citation: Haslett, S., Jones, G., Isidro, M., and Sefton, A. (2014) Small Area Estimation of Food Insecurity and Undernutrition in Nepal, Central Bureau of Statistics, National Planning Commissions Secretariat, World Food Programme, UNICEF and World Bank, Kathmandu, Nepal, December 2014. -

Nepal: the Maoists’ Conflict and Impact on the Rights of the Child
Asian Centre for Human Rights C-3/441-C, Janakpuri, New Delhi-110058, India Phone/Fax: +91-11-25620583; 25503624; Website: www.achrweb.org; Email: [email protected] Embargoed for: 20 May 2005 Nepal: The Maoists’ conflict and impact on the rights of the child An alternate report to the United Nations Committee on the Rights of the Child on Nepal’s 2nd periodic report (CRC/CRC/C/65/Add.30) Geneva, Switzerland Nepal: The Maoists’ conflict and impact on the rights of the child 2 Contents I. INTRODUCTION ................................................................................................... 4 II. EXECUTIVE SUMMARY AND RECOMMENDATIONS .................. 5 III. GENERAL PRINCIPLES .............................................................................. 15 ARTICLE 2: NON-DISCRIMINATION ......................................................................... 15 ARTICLE 6: THE RIGHT TO LIFE, SURVIVAL AND DEVELOPMENT .......................... 17 IV. CIVIL AND POLITICAL RIGHTS............................................................ 17 ARTICLE 7: NAME AND NATIONALITY ..................................................................... 17 Case 1: The denial of the right to citizenship to the Badi children. ......................... 18 Case 2: The denial of the right to nationality to Sikh people ................................... 18 Case 3: Deprivation of citizenship to Madhesi community ...................................... 18 Case 4: Deprivation of citizenship right to Raju Pariyar........................................ -
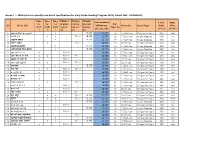
Annex 1 : - Srms Print Run Quantity and Detail Specifications for Early Grade Reading Program 2019 ( Cohort 1&2 : 16 Districts)
Annex 1 : - SRMs print run quantity and detail specifications for Early Grade Reading Program 2019 ( Cohort 1&2 : 16 Districts) Number Number Number Titles Titles Titles Total numbers Cover Inner for for for of print of print of print # of SN Book Title of Print run Book Size Inner Paper Print Print grade grade grade run for run for run for Inner Pg (G1, G2 , G3) (Color) (Color) 1 2 3 G1 G2 G3 1 अनारकल�को अꅍतरकथा x - - 15,775 15,775 24 17.5x24 cms 130 gms Art Paper 4X0 4x4 2 अनौठो फल x x - 16,000 15,775 31,775 28 17.5x24 cms 80 gms Maplitho 4X0 1x1 3 अमु쥍य उपहार x - - 15,775 15,775 40 17.5x24 cms 80 gms Maplitho 4X0 1x1 4 अत� र बु饍�ध x - 16,000 - 16,000 36 21x27 cms 130 gms Art Paper 4X0 4x4 5 अ쥍छ�को औषधी x - - 15,775 15,775 36 17.5x24 cms 80 gms Maplitho 4X0 1x1 6 असी �दनमा �व�व भ्रमण x - - 15,775 15,775 32 17.5x24 cms 80 gms Maplitho 4X0 1x1 7 आउ गन� १ २ ३ x 16,000 - - 16,000 20 17.5x24 cms 130 gms Art Paper 4X0 4x4 8 आज मैले के के जान� x x 16,000 16,000 - 32,000 16 17.5x24 cms 130 gms Art Paper 4X0 4x4 9 आ굍नो घर राम्रो घर x 16,000 - - 16,000 20 21x27 cms 130 gms Art Paper 4X0 4x4 10 आमा खुसी हुनुभयो x x 16,000 16,000 - 32,000 20 21x27 cms 130 gms Art Paper 4X0 4x4 11 उप配यका x - - 15,775 15,775 20 14.8x21 cms 130 gms Art Paper 4X0 4X4 12 ऋतु गीत x x 16,000 16,000 - 32,000 16 17.5x24 cms 130 gms Art Paper 4X0 4x4 13 क का �क क� x 16,000 - - 16,000 16 14.8x21 cms 130 gms Art Paper 4X0 4x4 14 क दे�ख � स륍म x 16,000 - - 16,000 20 17.5x24 cms 130 gms Art Paper 2X0 2x2 15 कता�तर छौ ? x 16,000 - - 16,000 20 17.5x24 cms 130 gms Art Paper 2X0 2x2 -

The Abolition of Monarchy and Constitution Making in Nepal
THE KING VERSUS THE PEOPLE(BHANDARI) Article THE KING VERSUS THE PEOPLE: THE ABOLITION OF MONARCHY AND CONSTITUTION MAKING IN NEPAL Surendra BHANDARI Abstract The abolition of the institution of monarchy on May 28, 2008 marks a turning point in the political and constitutional history of Nepal. This saga of constitutional development exemplifies the systemic conflict between people’s’ aspirations for democracy and kings’ ambitions for unlimited power. With the abolition of the monarchy, the process of making a new constitution for the Republic of Nepal has started under the auspices of the Constituent Assembly of Nepal. This paper primarily examines the reasons or causes behind the abolition of monarchy in Nepal. It analyzes the three main reasons for the abolition of monarchy. First, it argues that frequent slights and attacks to constitutionalism by the Nepalese kings had brought the institution of the monarchy to its end. The continuous failures of the early democratic government and the Supreme Court of Nepal in bringing the monarchy within the constitutional framework emphatically weakened the fledgling democracy, but these failures eventually became fatal to the monarchical institution itself. Second, it analyzes the indirect but crucial role of India in the abolition of monarchy. Third, it explains the ten-year-long Maoist insurgency and how the people’s movement culminated with its final blow to the monarchy. Furthermore, this paper also analyzes why the peace and constitution writing process has yet to take concrete shape or make significant process, despite the abolition of the monarchy. Finally, it concludes by recapitulating the main arguments of the paper. -

Forest Cover Map of Province 2, Nepal 84°30'0"E 85°0'0"E 85°30'0"E 86°0'0"E 86°30'0"E 87°0'0"E ± India
FOREST COVER MAP OF PROVINCE 2, NEPAL 84°30'0"E 85°0'0"E 85°30'0"E 86°0'0"E 86°30'0"E 87°0'0"E ± INDIA Province-7 Province-6 CHINA µ Province-4 Province-5 Province-3 INDIA Province-1 Province-2 INDIA N N " " 0 0 ' ' 0 0 3 3 ° ° 7 7 2 District Forest ('000 Ha) Forest (%) Other Land ('000 Ha) Other Land (%) 2 Bara 46.63 36.64 80.64 63.36 Dhanusha 27.15 22.84 91.70 77.16 Chitwan Mahottari 22.24 22.23 77.81 77.77 National Parsa 76.23 54.19 64.45 45.81 Park Parsa Rautahat 26.29 25.32 77.53 74.68 Wildlife Reserve Parsa Saptari 21.14 16.50 106.95 83.50 Subarnapur Wildlife Sarlahi 25.77 20.40 100.55 79.60 Reserve PROVINCE 3 Siraha 18.19 15.97 95.70 84.03 PARSA S K h Total 263.63 27.49 695.34 72.51 a h k o t la i Nijgadh Jitpur Paterwasugauli Simara a h i a d s a a N Parsagadhi P B SakhuwaPrasauni a i N k Chandrapur a n Jagarnathpur a a i d y y a a a l i o D h K Lalbandi Belwa Kolhabi e i hi Dhobini b d a a a d l n i Hariwan a N BARA h T ndhi ak ola Lokha L Kh Bahudaramai Khola Pokhariya RAUTAHAT Bagmati Parwanipur Bardibas Chhipaharmai Gujara Pakahamainpur Bindabasini Karaiyamai Phatuwa r tu Birgunj injo a i Kal d Bijayapur R a Kalaiya ola N im Kh N h la N " Prasauni J o " 0 Haripur h 0 ' K ' 0 Katahariya Birndaban 0 ° Baragadhi ° 7 Mithila 7 2 Pheta a i 2 iy n Ishworpur a i Barahathawa a im k a h Mahagadhimai d p l J a i a a o d B a N l h h N a C K S L e K la ho r la Garuda Gaushala o Ganeshman Adarshkotwal Gadhimai t i Devtal Dewahhi d K Maulapur Kabilasi a a a Chandranagar a l m R Charnath a a N i la Gonahi m d N SARLAHI a a a Ka K N di ma -

Table of Province 02, Preliminary Results, Nepal Economic Census
Number of Number of Persons Engaged District and Local Unit establishments Total Male Female Saptari District 16,292 44,341 28,112 16,229 20101SAPTAKOSHI MUNICIPALITY 940 1,758 1,248 510 20102KANCHANRUP MUNICIPALITY 1,335 3,157 2,135 1,022 20103 AGMISAIR KRISHNA SABARAN RURAL MUNICIPALITY 774 2,261 1,255 1,006 20104RUPANI RURAL MUNICIPALITY 552 2,184 1,319 865 20105SHAMBHUNATH MUNICIPALITY 960 1,844 1,093 751 20106KHADAK MUNICIPALITY 1,124 5,083 2,808 2,275 20107SURUNGA MUNICIPALITY 1,264 5,462 3,094 2,368 20108 BALAN-BIHUL RURAL MUNICIPALITY 433 1,048 720 328 20109BODE BARSAIN MUNICIPALITY 1,013 2,598 1,801 797 20110DAKNESHWORI MUNICIPALITY 949 2,171 1,456 715 20111 BELHI CHAPENA RURAL MUNICIPALITY 615 999 751 248 20112 BISHNUPUR RURAL MUNICIPALITY 406 766 460 306 20113RAJBIRAJ MUNICIPALITY 2,485 7,116 4,507 2,609 20114 MAHADEWA RURAL MUNICIPALITY 593 1,213 855 358 20115TIRAHUT RURAL MUNICIPALITY 614 1,207 828 379 20116 HANUMANNAGAR KANKALINI MUNICIPALITY 1,143 2,836 1,911 925 20117TILATHI KOILADI RURAL MUNICIPALITY 561 1,462 1,011 451 20118 CHHINNAMASTA RURAL MUNICIPALITY 531 1,176 860 316 Siraha District 13,163 43,902 28,989 14,913 20201LAHAN MUNICIPALITY 2,127 6,201 4,244 1,957 20202DHANGADHIMAI MUNICIPALITY 931 2,268 1,535 733 20203GOLBAZAR MUNICIPALITY 1,293 7,687 5,120 2,567 20204MIRCHAIYA MUNICIPALITY 1,567 5,322 2,559 2,763 20205KARJANHA MUNICIPALITY 551 1,230 802 428 20206KALYANPUR MUNICIPALITY 799 1,717 1,064 653 20207 NARAHA RURAL MUNICIPALITY 390 1,390 1,038 352 20208 BISHNUPUR RURAL MUNICIPALITY 599 1,236 915 321 20209 ARNAMA -

4.1.2 Nepal Province 2 Government Contact List
4.1.2 Nepal Province 2 Government Contact List Ministry National/Provincial/District City/Town Street Email Phone Phone No (Mobile) Fax Web site Authority /Physical No (Offi Numb Address ce) er Office of the Chief Ministry Province Janakpur Mills Area, N/A N/A N/A N/A N/A Janakpur - (Mohammad Lalbabu Raut) Nepal Ministry internal affairs and Province Janakpur Mills Area, N/A N/A N/A N/A N/A Law Janakpur - (Gyanendra Kumar Yadav) Nepal Ministry of Social Province Janakpur Mills Area, N/A N/A N/A N/A N/A Development Janakpur - (Nawal Kishor Sah) Nepal Ministry of Industry Province Janakpur Mills Area, N/A N/A N/A N/A N/A Tourism, Forest and Janakpur - Environment (Ram Naresh Rae) Nepal Ministry of Land Province Janakpur Mills Area, N/A N/A N/A N/A N/A Management, Agriculture Janakpur - and Co-operative (Shailendra Prasad Sah) Nepal Ministry of Physical Province Janakpur Mills Area, N/A N/A N/A N/A N/A Infrastructure and Janakpur - Development (Jitendra Sonal) Nepal Ministry of Economic Province Janakpur Mills Area, N/A N/A N/A N/A N/A Affairs and Planning Janakpur - (Bijay Kumar Yadav) Nepal District Administration Bed Prasad Aryal /Arling Bab Janakpur-Dhanu Janakpur - daodhanusha 986934 9851093686 N/A http://daodhanusha.moha.gov. Office - Dhanusa a Cheettri/Dev Chandra Gaot sa CDO office 20@gmail. 3495 np/ aula road com dcgartaula@g mail.com District Administration Siraha municipali 033-520121 N/A NA N/A N/A N/A Office - Siraha ty Siraha Municipality Suresh Chorhar-DRR focal Goal Bazar-Siraha N/A sureshchorbar 985283 NA N/A http://sirahamun.gov.np/en person Municipality @gmail.com 2976 Siraha Madar Custom Sumit Gupta Siraha Municipali N/A N/A 984903 N/A N/A N/A Office ty- Khairtoka- 2942 Madar District Administration Surendra Poudyal Rajbiraj Rajbiraj Mun paudelsurendr 985285 031-523762 N/A N/A Office - Saptari icipality [email protected] 7777 Rajbiraj municipality Shambhu Prasad Yadav N/A Rajbiraj Mun rajbirajmunsa 985284 +977031520703/ N/A http://www.rajbirajmun.gov.np/ icipality ptari@gmail. -

SQUEAC REPORT Saptari DISTRICT, NEPAL February/March
SQUEAC REPORT SAPTARI DISTRICT SQUEAC INVESTIGATION Saptari DISTRICT, NEPAL February/March 2013 1 SAPTARI DISTRICT SQUEAC INVESTIGATION 2 SAPTARI DISTRICT SQUEAC INVESTIGATION ACKNOWLEDGEMENTS CMN would like to thank the following organizations and persons without whose support the objectives would not have been achieved: . ECHO and OFDA for financial assistance and ACF Nepal for supporting in logistics and management . DPHO/MOHP for their on-going support and facilitation of the SQUEAC evaluation in Saptari district . Saptari community for allowing the investigation to be carried out on their territory. Special thanks go to the local authority, parents, Female community Health Volunteers (FCHVs), drivers, and community guides for their valuable information and time. The entire assessment team for their high level of commitment and cooperation in all stages of the training and investigation process. 3 SAPTARI DISTRICT SQUEAC INVESTIGATION Executive Summary Nepal is a land locked country with approximately 30 million inhabitants and 75 districts. Saptari District is located in the eastern part of Nepal with total population of 639,284 with 85,876 being children under 5 years. There are 13 OTP running through government health system with the support of ACF since June/July 2012. The objectives of SQUEAC were to evaluate the CMAM program in Saptari District and build capacity in SQUEAC methodology so that the tool can be adopted and used to improve nutrition programs. Findings from the assessment indicated a period coverage estimate of 40.9% (27.8%- 55.4%).This estimate lies below the Sphere standard of 50% in rural program areas. The table below indicates a summary of the barriers to be overcome and recommendations in order to enhance program coverage in Saptari district.