Publication by Moretto Et Al. on Catena
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Stato Delle Acque Sotterranee Della Provincia Di Padova
STATO DELLE ACQUE SOTTERRANEE DELLA PROVINCIA DI PADOVA Anno 2017 ARPAV Commissario Straordinario Riccardo Guolo Direttore Tecnico Carlo Terrabujo Dipartimento Provinciale di Padova Alessandro Benassi Progetto e realizzazione: Servizio Monitoraggio e Valutazioni Claudio Gabrieli Redazione: Glenda Greca Gruppo di lavoro: Paola Baldan, Cinthia Lanzoni, Roberta Millini, Silvia Rebeschini, Daniele Suman Analisi di laboratorio: Dipartimento Regionale Laboratori Supporto e collaborazione del Servizio Acque Interne È consentita la riproduzione di testi, tabelle, grafici ed in genere del contenuto del presente rapporto esclusivamente con la citazione della fonte. 2 INDICE 1. Presentazione ............................................................................................................................. 4 2. Quadro normativo ....................................................................................................................... 4 3. Quadro territoriale di riferimento .................................................................................................. 5 3.1 Inquadramento idrogeologico ................................................................................................ 5 4. Le pressioni sul territorio ............................................................................................................. 9 5. La rete di monitoraggio delle acque sotterranee........................................................................ 11 5.1 Parametri e frequenze: monitoraggio qualitativo ................................................................. -

Istituti Comprensivi Della Provincia Di Padova
ISTITUTI COMPRENSIVI DELLA PROVINCIA DI PADOVA Istituzione scolastica comune tel mail web ICS 'Vittorino da Feltre' Abano Terme 049.8600360 [email protected] www.icabanoterme.edu.it ICS 'M. Valgimigli' Albignasego 049.710031 [email protected] www.icalbignasego.gov.it ICS 'E. De Amicis' Borgo Veneto 0429.89104 [email protected] www.icmegliadino.gov.it ICS 'Borgoricco' Borgoricco 049.5798016 [email protected] www.icborgoricco.net ICS 'Cadoneghe' Cadoneghe 049.700660 [email protected] www.iccadoneghe.gov.it ICS 'Campodarsego' Campodarsego 049.9299890 [email protected] www.scuolecampodarsego.edu.it ICS 'G. Parini' Camposampiero 049.5790500 [email protected] www.icscamposampiero.edu.it ICS 'Carmignano-Fontaniva' Carmignano di Brenta 049.5957050 [email protected] www.icscarmignanofontaniva.edu.it ICS 'Comuni della Sculdascia' Casale di Scodosia 0429.879113 [email protected] www.icsculdascia.gov.it ICS 'Casalserugo-Bovolenta' Casalserugo 049.643031 [email protected] www.ics-casalserugo.gov.it ICS 'Cervarese Santa Croce' Cervarese Santa Croce 049.9915871 [email protected] www.comprensivocervarese.it ICS 'di Cittadella' Cittadella 049.5970442 [email protected] www.iccittadella.edu.it www.istitutocomprensivodicodevigo. ICS 'Codevigo' Codevigo 049.5817860 [email protected] edu.it ICS 'N. Tommaseo' Conselve 049.9500870 [email protected] www.ictommaseo.edu.it ICS 'A. Manzoni' Correzzola 049.9760129 [email protected] www.icscorrezzola.it ICS 'Curtarolo -

POSTI PER Contratti a Tempo Determinato
Profilo Collaboratore scolastico: Posti disponibili per CONTRATTI A TEMPO DETERMINATO a.s. 2020/21 posti part- posti al posti al Scuola Comune time Ore Note 31/8/2021 30/6/2021 30/6/2021 IC DI ABANO TERME ABANO TERME 1 18 ore IIS ALBERTI ABANO TERME 1 30 ore IPSAR P.D'ABANO ABANO TERME 1 24 ore CTP ALBIGNASEGO ALBIGNASEGO 1 12 ore 18 ore IC DI ALBIGNASEGO ALBIGNASEGO 7 2 12 ore IC E. DE AMICIS BORGO VENETO 1 30 ore IC DI BORGORICCO BORGORICCO 1 1 12 ore IC DI CADONEGHE CADONEGHE 1 1 18 ore IC DI CAMPODARSEGO CAMPODARSEGO 1 1 24 ore I.C. DI CAMPOSAMPIERO "PARINI" CAMPOSAMPIERO 1 1 18 ore IIS I.NEWTON-PERTINI CAMPOSAMPIERO CAMPOSAMPIERO 2 1 18 ore IC CARMIGNANO-FONTANIVA CARMIGNANO DI BRENTA 6 1 30 ore 18 ore IC CASALE DI SCODOSIA CASALE DI SCODOSIA 2 12 ore IC DI CASALSERUGO CASALSERUGO 1 DI CERVARESE SANTA CROCE CERVARESE SANTA CROCE 1 1 1 18 ore CTP CITTADELLA CITTADELLA 1 I.I.S. "A MEUCCI" - CITTADELLA CITTADELLA 1 30 ore IC DI CITTADELLA CITTADELLA 9 1 IIS T.LUCREZIO CARO-CITTADELLA CITTADELLA 1 1 18 ore posti part- posti al posti al Scuola Comune time Ore Note 31/8/2021 30/6/2021 30/6/2021 ITE GIRARDI -CITTADELLA CITTADELLA 1 12 ore IC DI CODEVIGO CODEVIGO 2 2 1 18 ore IC DI CONSELVE CONSELVE 1 1 18 ore IC DI CORREZZOLA CORREZZOLA 3 1 24 ore IC DI CURTAROLO CURTAROLO 1 24 ore IC CARRARESE EUGANEO DUE CARRARE 1 1 30 ore IC PASCOLI ESTE 1 1 1 21 ore IIS "ATESTINO" ESTE 1 1 18 ore IIS "EUGANEO" ESTE 1 1 IIS "FERRARI" ESTE 1 2 12 ore; 12 ore; IC DI GALLIERA VENETA GALLIERA VENETA 1 1 1 24 ore 13 ore; 18 ore; IC GRANTORTO E S. -

BANDO SELEZIONE VOLONTARI 2017 CANDIDATI IDONEI NON SELEZIONATI Aggiornamento Al 25-10-2017
SERVIZIO CIVILE NAZIONALE - BANDO SELEZIONE VOLONTARI 2017 CANDIDATI IDONEI NON SELEZIONATI aggiornamento al 25-10-2017 nelle prime pagine si trovano le segnalazioni più recenti ENTE SEDE DI COMUNE PROV. N° CANDIDATI IDONEI CONTATTO DI RIFERIMENTO (TEL., MAIL) ATTUAZIONE NON SELEZIONATI Casa di Riposo di Casa di Riposo Pontelongo PD 5 Davide Schiavon 049/9775046 Pontelongo (PD) Via Ungheria, 340 [email protected] NZ03232 Università di Padova Pet Volunteer: il PADOVA 3 [email protected] benessere animale e il Chiediamo gentilmente, nel caso di subentri effettuati con ragazzi Servizio Civile di altri enti, di rendere noto all'ente "originario" dell'assegnazione Nazionale del candidato al nuovo progetto/ente, così da poter procedere per eventuali scorrimenti di graduatoria interna in maniera più agevole. Università di Padova I nostri diritti, le PADOVA 3 [email protected] nostre Chiediamo gentilmente, nel caso di subentri effettuati con ragazzi responsabilità di altri enti, di rendere noto all'ente "originario" dell'assegnazione del candidato al nuovo progetto/ente, così da poter procedere per eventuali scorrimenti di graduatoria interna in maniera più agevole. Università di Padova Quattro stagioni fra le PADOVA 8 [email protected] piante e l'uomo: l'Orto e il Chiediamo gentilmente, nel caso di subentri effettuati con ragazzi Giardino dell'Università di di altri enti, di rendere noto all'ente "originario" dell'assegnazione Padova del candidato al nuovo progetto/ente, così da poter procedere per eventuali scorrimenti di graduatoria interna in maniera più agevole. Università di Padova Biblioteche PADOVA 20 [email protected] dell'Università di Padova: Chiediamo gentilmente, nel caso di subentri effettuati con ragazzi tanti progetti, un unico di altri enti, di rendere noto all'ente "originario" dell'assegnazione Sistema! del candidato al nuovo progetto/ente, così da poter procedere per eventuali scorrimenti di graduatoria interna in maniera più agevole. -

Distretto Militare Di Padova- Ruoli Matricolari
Pe:.R K\C...M\Ei'6Efi!E. B,\JOl.0 ')\fì,8 O ... C\KE: 'b, \J\....'.) u fF1 �,R Lt-. o .::cl·-rn \ e P\\.E. 1 f<.IVoL�E.�..SI ?,F.,'f:.'5So L UFF1 -Gio- ----SICRI C ES(;..,:Zc., rio - \.J\� E1Rl)R 1� '1...:, o::d.8� Ro1if\ I lé.L. 06. 4-=f- ..55 �558 C'?. 4b 9-i 3-i 6 "::f ot0aR.1 F, ce� )tt:: \ \. J · �.,\ "Ft::.:.A CASE�MPt N�tAK O '......iA ' { · ,. U\f\ �?t'R\Ol?ì dLt RorlA o�. C..1- 3581.0b MINISTERO PER I BENI CULTURALI E AMBIENTALI ARCHIVIO DI STATO DI PADOVA UFFICIO LEVA DI PADOVA - DISTRETTO DI PADOVA Le liste di leva di Padova risultano divise per mandamento e per classe. Vi sono compresi anche i volumi relativi alle liste di revisioni dei riformati e rivedibili di Padova e provincia . 1 mandamenti (n.9) comprendono a loro volta un certo numero di comuni secondo la seguente suddivisione: 1. Mandamento di Camposampiero. Comprende i seguenti 15 comuni: · Borgoricco San Giorgio delle Pe1tiche Campo San Martino San Michele delle Badesse Campodarsego Sant'Eufemia Camposampiero Santa Giustina in Colle Cmtarolo Trebaseleghe · Loreggia Villa del Conte Massanzago Villanova di Camposampiero Piombino Dese - 2. Mandamento di Cittadella. Comprende i seguenti 10 comuni: Cittadella Gazzo Padovano Carmignano di Brenta San Giorgio in Bosco Fontaniva San Martino di Lupari Galliera Veneta San Pietro in Gù Grantorto Tombolo Classe 1857: Mandamento di CAMPOSAMPIERO n. 100 Mandamento di CITTADELLA n. 101 Mandamento di CONSELVE n. 102 Mandamento di ESTE n. 103 Mandamento di MONSELICE n. -
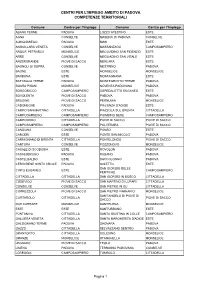
Centri Per L'impiego Ambito Di Padova Competenze Territoriali
CENTRI PER L'IMPIEGO AMBITO DI PADOVA COMPETENZE TERRITORIALI Comune Centro per l’Impiego Comune Centro per l’Impiego ABANO TERME PADOVA LOZZO ATESTINO ESTE AGNA CONSELVE MASERA' DI PADOVA CONSELVE ALBIGNASEGO PADOVA MASI ESTE ANGUILLARA VENETA CONSELVE MASSANZAGO CAMPOSAMPIERO ARQUA' PETRARCA MONSELICE MEGLIADINO SAN FIDENZIO ESTE ARRE CONSELVE MEGLIADINO SAN VITALE ESTE ARZERGRANDE PIOVE DI SACCO MERLARA ESTE BAGNOLI DI SOPRA CONSELVE MESTRINO PADOVA BAONE ESTE MONSELICE MONSELICE BARBONA ESTE MONTAGNANA ESTE BATTAGLIA TERME PADOVA MONTEGROTTO TERME PADOVA BOARA PISANI MONSELICE NOVENTA PADOVANA PADOVA BORGORICCO CAMPOSAMPIERO OSPEDALETTO EUGANEO ESTE BOVOLENTA PIOVE DI SACCO PADOVA PADOVA BRUGINE PIOVE DI SACCO PERNUMIA MONSELICE CADONEGHE PADOVA PIACENZA D'ADIGE ESTE CAMPO SAN MARTINO CITTADELLA PIAZZOLA SUL BRENTA CITTADELLA CAMPODARSEGO CAMPOSAMPIERO PIOMBINO DESE CAMPOSAMPIERO CAMPODORO CITTADELLA PIOVE DI SACCO PIOVE DI SACCO CAMPOSAMPIERO CAMPOSAMPIERO POLVERARA PIOVE DI SACCO CANDIANA CONSELVE PONSO ESTE CARCERI ESTE PONTE SAN NICOLO' PADOVA CARMIGNANO DI BRENTA CITTADELLA PONTELONGO PIOVE DI SACCO CARTURA CONSELVE POZZONOVO MONSELICE CASALE DI SCODOSIA ESTE ROVOLON PADOVA CASALSERUGO PADOVA RUBANO PADOVA CASTELBALDO ESTE SACCOLONGO PADOVA CERVARESE SANTA CROCE PADOVA SALETTO ESTE SAN GIORGIO DELLE CINTO EUGANEO ESTE CAMPOSAMPIERO PERTICHE CITTADELLA CITTADELLA SAN GIORGIO IN BOSCO CITTADELLA CODEVIGO PIOVE DI SACCO SAN MARTINO DI LUPARI CITTADELLA CONSELVE CONSELVE SAN PIETRO IN GU CITTADELLA CORREZZOLA PIOVE DI SACCO SAN PIETRO -
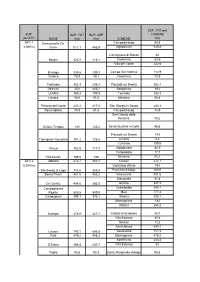
SUP. SUP. TOT Per COMUNE Per
SUP. TOT per SUP. SUP. TOT SUP. ASP COMUNE per ATC NOME (ha) (ha) COMUNE (ha) ATC 1Barrucchella Ca' Campodarsego 84,3 3.086 haFarini 611,1 456,9 Vigodarzere 526,8 Carmignano di Brenta 42 Boschi 125,9 115,1 Fontaniva 83,9 Villa del Conte 222,6 Busiago 335,5 299,3 Campo San Martino 112,9 Colonia 72,9 40,1 Fontaniva 72,9 Contarina 352,4 236,4 Piazzola sul Brenta 352,4 Desman 503 405,7 Borgoricco 503 La Mira 160,3 109,8 Tombolo 160,3 Lissaro 55,8 51,8 Mestrino 55,8 Palazzo del Conte 243,3 217,8 San Giorgio in Bosco 243,3 Reschigliano 74,5 61,8 Campodarsego 74,5 San Giorgio delle Pertiche 89,2 Guizze-Tergola 148 125,4 Santa Giustina in Colle 58,8 Piazzola sul Brenta 143 Tremignon Vaccarino 151,2 125,5 Limena 8,2 Curtarolo 109,6 Vanzo 142,5 117,3 Vigodarzere 32,9 Campodoro 17,7 Villa Kerian 109,8 106 Mestrino 92,1 ATC 2 Abbazia 272,7 252,1 Carceri 272,7 6.204 ha Vighizzolo d'Este 154 Barchessa al Lago 314,6 303,5 Piacenza d'Adige 160,6 Boara Pisani 481,6 463,2 Vescovana 481,6 Stanghella 57,4 Ca' Conti/2 404,6 383,5 Granze 347,2 Campagnazza Castelbaldo 348,1 Pajette 525,5 509,9 Masi 177,4 Campagnon 399,1 376,1 Urbana 399,1 Montagnana 182 Urbana 268,2 Grompe 478,9 427,1 Casale di Scodosia 28,7 Villa Estense 31,6 Granze 14,2 Sant'Urbano 540,1 Lavacci 743,1 696,8 Vescovana 157,2 Palù 475,2 448,3 Montagnana 475,2 Sant'Elena 233,4 S.Elena 298,4 287,7 Villa Estense 65 Taglie 95,8 93,3 Santa Margherita d'Adige 95,8 Tre Canne 218,4 216,8 Vighizzolo d'Este 218,4 Val Vecchia - Val Casale di Scodosia 348,8 Nuova 673 662,3 Merlara 324,2 Valli 202,8 197,3 -
Rapambpreliminrae
PIANO DI ASSETTO DEL TERRITORIO (P. A. T.) DEL COMUNE DI PONTE SAN NICOLÒ (PD) VALUTAZIONE AMBIENTALE STRATEGICA Art. 4 L. R. n°11/2004 “Norme per il governo del territorio” Ai sensi della direttiva 2001/42/CE del 27.06.2001 “Valutazione degli effetti di determinati piani e programmi sull’ambiente” e della D. G. R. 2988 del 01/10/2004 “Primi indirizzi operativi per la V. A. S. di piani e programmi della Regione del Veneto”. D. G. R. 3262 del 24/10/2006 - Guida metodologica per la Valutazione Ambientale Strategica. Procedure e modalità operative. D. G. R. 791 del 31/03/2009 “Adeguamento delle procedure di Valutazione Ambientale Strategica a seguito della modifica alla Parte Seconda del Decreto Legislativo 3 aprile 2006, n° 152, cd “Codice Ambiente”, apportata dal D. Lgs. 16 gennaio 2008, n° 4” D. G. C. n° ________ COMUNE DI PONTE SAN NICOLO’ del ___/___/_____ Coordinatore: Arch. Roberto Bettio Studio Leoni Settore Uso ed Assetto del Territorio dott. Maurizio Leoni - Agronomo Comune Ponte San Nicolò (Pd) via Donatori del Sangue, 20 31020 – Fontane di Villorba (TV) Progettista: Tel. e fax: 0422/423000 Arch. Roberto Cavallin E – mail: [email protected] Studio Cavallin associati Collaboratore: dott. Signori Alessio – Agronomo Vicolo Beato Crescenzio, 12/1 35012 – Camposampiero (PD) 1. RIFERIMENTI NORMATIVI 5 2. METODOLOGIA DI INDAGINE 6 3. INQUADRAMENTO TERRITORIALE 10 4. INDICATORI: GENERALITA’ 11 5. ANALISI PRELIMINARE (SCOPING) 12 5.1. COSTRUZIONE DEL QUADRO PIANIFICATORIO E PROGRAMMATICO 12 5.2. PIANO TERRITORIALE REGIONALE DI COORDINAMENTO (P. T. R. C.) 12 5.3. -

OGGETTO: Procedura Aperta Per L'affidamento Dei Lavori Di Ripristino
SEDE LEGALE: MONSELICE (PD) 35043 - Via C. Colombo, 29/A - Tel. 0429 787.611 - Fax 0429 783.747 E-mail: [email protected] - [email protected] - www.centrovenetoservizi.it Cod. Fisc. - P.IVA - Reg. Imprese CCIAA di Pd 00064780281 R.E.A. di Pd n. 256689 - Cap. Soc. € 200.465.044,00 i.v. Albo Naz. Gest. Rifiuti VE 0981/0 OGGETTO: procedura aperta per l’affidamento dei lavori di ripristino stradale nelle aree Est e Ovest dei Comuni gestiti da Centro Veneto Servizi S.p.A. Lotto Area Est: Comuni di Granze, Bagnoli di Sopra, Anguillara Veneta, Due Carrare, Agna, Pozzonovo e Casalserugo (Pd) – CIG: 7163637443 Importo a base d’asta Euro 466.330,00= oltre IVA comprensivo degli oneri per la sicurezza. Lotto Area Ovest: Comuni di Ponso, Ospedaletto Euganeo, Solesino, Baone, Carceri, Monselice e Saletto (Pd) – CIG: 7163646BAE Importo a base d’asta Euro 410.043,33= oltre IVA comprensivo degli oneri per la sicurezza. Comunicazione ex art. 29 e 76, comma 5, d.lgs. n. 50/16 Spettabili Concorrenti, si comunica che, all’esito della valutazione dei requisiti soggettivi, il Seggio di gara ha ammesso alla procedura i seguenti candidati: Fornitori Comune Provincia Codice Fiscale 1 Molon Graziano S.r.l. Arzignano Vicenza 00931430243 2 Delta Scavi S.r.l. Limena Padova 04428860284 3 Trentin Asfalti S.r.l. Conegliano Treviso 04287130266 4 Salima S.r.l. Limena Padova 00217440254 5 Tolomio S.r.l. Borgoricco Padova 02509140287 6 Nuova Geo.Mac. S.r.l. Cividale del Friuli Udine 01638870939 7 Impresa De Giuliani S.r.l. -

ALLEGATO G - ELENCO NON AMMESSI MISURA "A" (Nuove Caldaie a Gas Naturale O GPL)
ALLEGATO G - ELENCO NON AMMESSI MISURA "A" (nuove caldaie a Gas naturale o GPL) Progressivo in ordine PROTOCOLLO Data_Protocollo RICHIEDENTE COMUNE RESIDENZA NOTE alfabetico 1 0048736 01/08/2019 ADESSO NICOLA PADOVA DOMANDA DOPPIA 2 0048022 30/07/2019 ADI NABIL PADOVA INCOMPLETA COMPILAZIONE DEL MODELLO 3 0048661 01/08/2019 AGOSTINI PAOLO ALBIGNASEGO INCOMPLETA COMPILAZIONE DEL MODELLO 4 0049880 07/08/2019 ALBERTI CRISTIANA CADONEGHE INCOMPLETA COMPILAZIONE DEL MODELLO 5 0047910 29/07/2019 ALLEGRELLI DANIELE PADOVA INCOMPLETA COMPILAZIONE DEL MODELLO 6 0049592 06/08/2019 ANDOLFO GLORIA MONSELICE INCOMPLETA COMPILAZIONE DEL MODELLO 7 0048296 31/07/2019 BACELLE SARA PIOVE DI SACCO INCOMPLETA COMPILAZIONE DEL MODELLO 8 0048667 01/08/2019 BALDIN ELISA PONSO INCOMPLETA COMPILAZIONE DEL MODELLO 9 0048904 02/08/2019 BATTAGLIA GRAZIELLA FONTANIVA INCOMPLETA COMPILAZIONE DEL MODELLO 10 0050030 08/08/2019 BETTELLA FIORENZO VIGONZA INCOMPLETA COMPILAZIONE DEL MODELLO 11 0049369 05/08/2019 BIASIBETTI DANIELE CAMPODARSEGO INCOMPLETA COMPILAZIONE DEL MODELLO 12 0048108 30/07/2019 BRAGHETTO SIMONETTA CADONEGHE INCOMPLETA COMPILAZIONE DEL MODELLO 13 0050343 09/08/2019 BRUNO ANTONIO PADOVA INCOMPLETA COMPILAZIONE DEL MODELLO 14 0050317 09/08/2019 CANNARILE VITA ANTONIA PADOVA INCOMPLETA COMPILAZIONE DEL MODELLO 15 0048915 02/08/2019 CANTON CLAUDIO PADOVA INCOMPLETA COMPILAZIONE DEL MODELLO 16 0048607 01/08/2019 CASELLA MARCO CONSELVE MANCANZA REQUISITI AL MOMENTO DELLA DOMANDA 17 0049556 06/08/2019 CESTER MARIA ANNA CADONEGHE CARTA IDENTITA' MANCANTE 18 -

Elenco Strade Provinciali
Gennaio 2015 Provincia di Padova Limitazioni al traffico SP/Tr/Dir Denominazione Percorso Limiti di sagoma Carreggiata < 6m Carreggiata 6,00m – 7,00m Carreggiata ≥ 7,00 m 1/0/0 dell'Adige Ca' Morosini – Boara Pisani - Anguillara Veneta Km 0+000 – 23+245 2/0/0 Romana Padova - Montegrotto Km 4+400 – 7+287 2/0/1 Romana – dir. Abano dir. per Abano Terme Km 0+000 – 0+300 3/1/0 Pratiarcati S. Giacomo – Bovolenta Km 8+900 – 11+000 Km 8+070 – 8+900 Km 11+700 – 16+000 Km 11+000-11+700 3/2/0 Pratiarcati Bovolenta - Anguillara Veneta Km 16+000 – 29+500 Km 29+500 – 30+500 Km 30+500 – 38+298 3/3/0 Circonvallazione Circonvallazione Bovolenta Km 16+140 – 16+640 4/0/0 Porto Vigorovea – Brugine – Arzerello Km 5+900 – 6+300 Km 0+000 – 5+900 Km 6+300 – 7+410 4/0/0 Porto Arzerello – Arzergrande - Codevigo Km 19+906 – 20+900 Km 20+900 – 22+500 Km 22+500 – 25+000 Km 25+000 – 26+010 4/0/1 dir. Campagnola Campagnola – Piove di Sacco Km 0+000 – 2+900 5/0/0 Amnia Monselice – Tribano – Bagnoli di S. - Agna Km 0+690 – 0+750 Km 2+000 – 7+000 Km 0+750 – 2+000 Km 8+000 – 20+000 Km 7+000 – 8+000 Km 20+000 – 20+943 6/0/0 di Cà Borin Monselice - Baone - Este Km 4+200 - km 8+242 Km 2+500 – 4+200 Km 0+524 – 2+500 6/0/1 dir Arquà Arquà Petrarca Km 0+000 - 2+850 7/0/0 Balduina Cà Morosini - Balduina - Piacenza d'Adige Km 0+000 – 6+540 8/0/0 dei Bersaglieri S.Elena – Granze – Vescovana – Barbona Km 3+751 – 8+000 Km 8+000 – 10+500 Km 10+500 – 14+778 8/0/1 dei Bersaglieri - dir. -

Avvenimenti Accaduti a Fontaniva Nei Giorni Della Liberazione
ASSOCIAZIONE NAZIONALE COMBATTENTI E REDUCI FEDERAZIONE PROVINCIALE di PADOVA Sezione di FONTANIVA MICHELAZZO Remo AVVENIMENTI ACCADUTI A FONTANIVA NEI GIORNI DELLA LIBERAZIONE Edizione dicembre 2016 Con il contributo di BCC Roma Agenzia di Fontaniva Via Giovanni XXIII, 15/1 Patrocinio Con il contributo Comune di Fontaniva della Sezione FIDCA di Fontaniva Stampato in proprio nel mese di dicembre 2016 Riproduzione anche parziale vietata Associazione Nazionale Combattenti e Reduci Sezione di Fontaniva INDICE pagina Introduzione al testo del S.Ten Remo Michelazzo 9 Presentazione del Prof. Guerrino Citton 11 Memorie di Gino BATTISTELLA 13 Intervista a Emilio POZZATO 20 Intervista a Gina BATTISTELLA 22 Intervista ad Arrigo D’ALVISE 25 Intervista a Maria PASQUALE 33 Intervista a Mariolina POZZATO 35 Intervista a Elda REFFO 38 Intervista a Nazzarena VELO 43 Intervista a Giorgio DIDONÈ 47 Intervista a Cesarina IMPENATI 57 Intervista a Maria Rosa ZEN 68 Interista ad Antonio SPESSATO 70 Intervista a Luigina CERCHIARO 71 Intervista a Matteo ARTUSO 72 Intervista a Federico REFFO 74 Intervista a Sergio SPIGA 82 Intervista ad Antonio SPIGA 88 Intervista a Egidio BATTISTELLA 94 Elenco analitico dei nomi 101 INTRODUZIONE AL TESTO Il libro è il frutto (compendio) di una ricerca sui patrioti che hanno operato nel territorio di Fontaniva durante la Resistenza e sui valori che l’hanno ispirata. L’obiettivo del mio lavoro è attualizzare ciò che è stato per renderlo fruibile alle nuove generazioni. Il testo è stato scritto sulla falsariga dei miei precedenti lavori e ha avuto inizio il giorno in cui Gino BATTISTELLA, dopo avermene parlato, mi consegnò le sue me- morie.