A Light-Weight Smartphone GPS Error Model for Simulation
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Nokia Lumia 521 User Manual
www.nokia.com Product and safety information Copyright © 2013 Nokia. All rights reserved. Nokia and Nokia Connecting People are trademarks or registered trademarks of Nokia Corporation. Other product and company names mentioned herein may be trademarks or trade names of their respective owners. The phone supplied in the sales package may differ from that shown. Specifications subject to change without notice. Printed in China. 9260765 Ver. 1.0 03/13 Quick Guide Psst... Nokia Lumia 521 This guide isn't all there is... For the online user guide, even more info, user Contents guides in another language, and Safety 3 troubleshooting help, go to www.nokia.com/ support. Keys and parts 4 Check out the videos at www.youtube.com/ Get started 5 NokiaSupportVideos. Get the basics 9 For info on Nokia Service terms and Privacy policy, go to www.nokia.com/privacy. Try out the touch screen 10 First start-up Take your friends with you 15 Your new phone comes with great features that will be installed when you start your phone Messages 17 for the first time. Allow some minutes for your Mail 21 phone to be ready. Take photos and share 25 HERE Maps 27 Browse the web 29 Feature-specific instructions 36 Product and safety information 38 2 Stop using the device until the glass is replaced by Safety qualified service personnel. Read these simple guidelines. Not following them may be dangerous or illegal. For further info, read the PROTECT YOUR HEARING complete user guide. To prevent possible hearing damage, do not listen at high volume levels for long periods. -

RADA Sense Mobile Application End-User Licence Agreement
RADA Sense Mobile Application End-User Licence Agreement PLEASE READ THESE LICENCE TERMS CAREFULLY BY CONTINUING TO USE THIS APP YOU AGREE TO THESE TERMS WHICH WILL BIND YOU. IF YOU DO NOT AGREE TO THESE TERMS, PLEASE IMMEDIATELY DISCONTINUE USING THIS APP. WHO WE ARE AND WHAT THIS AGREEMENT DOES We Kohler Mira Limited of Cromwell Road, Cheltenham, GL52 5EP license you to use: • Rada Sense mobile application software, the data supplied with the software, (App) and any updates or supplements to it. • The service you connect to via the App and the content we provide to you through it (Service). as permitted in these terms. YOUR PRIVACY Under data protection legislation, we are required to provide you with certain information about who we are, how we process your personal data and for what purposes and your rights in relation to your personal data and how to exercise them. This information is provided in https://www.radacontrols.com/en/privacy/ and it is important that you read that information. Please be aware that internet transmissions are never completely private or secure and that any message or information you send using the App or any Service may be read or intercepted by others, even if there is a special notice that a particular transmission is encrypted. APPLE APP STORE’S TERMS ALSO APPLY The ways in which you can use the App and Documentation may also be controlled by the Apple App Store’s rules and policies https://www.apple.com/uk/legal/internet-services/itunes/uk/terms.html and Apple App Store’s rules and policies will apply instead of these terms where there are differences between the two. -

Step 1(To Be Performed on Your Google Pixel 2 XL)
For a connection between your mobile phone and your Mercedes-Benz hands-free system to be successful, Bluetooth® must be turned on in your mobile phone. Please make sure to also read the operating and pairing instructions of the mobile phone. Please follow the steps below to connect your mobile phone Google Pixel 2 XL with the mobile phone application of your Mercedes-Benz hands-free system using Bluetooth®. Step 1(to be performed on your Google Pixel 2 XL) Step 2 To get to the telephone screen of your Mercedes-Benz hands-free system press the Phone icon on the homescreen. Step 3 Select the Phone icon in the lower right corner. Step 4 Select the “Connect a New Device” application. Page 1 of 3 Step 5 Select the “Start Search Function” Step 6 The system will now search for any Bluetooth compatible phones. This may take some time depending on how many devices are found by the system. Step 7 Once the system completes searching select your mobile phone (example "My phone") from the list. Step 8 The pairing process will generate a 6-digit passcode and display it on the screen. Verify that the same 6 digits are shown on the display of your phone. Step 9 (to be performed on your Google Pixel 2 XL) There will be a pop-up "Bluetooth Request: 'MB Bluetooth' would like to pair with your phone. Confirm that the code '### ###' is shown on 'MB Bluetooth'. " Select "Pair" on your phone if the codes match. Page 2 of 3 Step 10 After the passcode is verified on both the mobile and the COMAND, the phone will begin to be authorized. -
Supported Android Smartphone and Tablet Devices
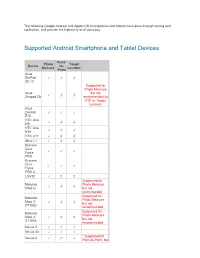
The following Google Android and Apple iOS smartphones and tablets have gone through testing and calibration, and provide the highest level of accuracy: Supported Android Smartphone and Tablet Devices Point- Photo Target Device to- Measure Location Point Asus ZenPad ✓ ✗ ✗ 3S 10 Supported for Photo Measure Asus but not ✓ ✗ ✗ Zenpad Z8 recommended for P2P or Target Location Asus Zenpad ✓ ✓ ✓ Z10 HTC One ✓ ✗ ✗ M8 HTC One ✓ ✗ ✗ Mini HTC U11 ✓ ✗ ✗ iNew L1 ✓ ✗ ✗ Kyocera Dura ✓ ✓ ✓ Force PRO Kyocera Dura ✓ ✓ ✓ Force PRO 2 LGV20 ✓ ✗ ✗ Supported for Motorola Photo Measure ✓ ✗ ✗ Moto G but not recommended Supported for Motorola Photo Measure Moto X ✓ ✗ ✗ but not XT1052 recommended Supported for Motorola Photo Measure Moto X ✓ ✗ ✗ but not XT1053 recommended Nexus 5 ✓ ✓ ✓ Nexus 5X ✓ ✓ ✓ * Supported for Nexus 6 ✓ ✓* ✓ Point-to-Point, but cannot guarantee +/-3% accuracy * Supported for Point-to-Point, but Nexus 6P ✓ ✓* ✓ cannot guarantee +/-3% accuracy * Supported for Point-to-Point, but Nexus 7 ✓ ✓* ✓ cannot guarantee +/-3% accuracy Samsung Galaxy ✓ ✓ ✓ A20 Samsung Galaxy J7 ✓ ✗ ✓ Prime * Supported for Samsung Point-to-Point, but GALAXY ✓ ✓* ✓ cannot guarantee Note3 +/-3% accuracy Samsung GALAXY ✓ ✓ ✓ Note 4 * Supported for Samsung Point-to-Point, but GALAXY ✓ ✓* ✓ cannot guarantee Note 5 +/-3% accuracy Samsung GALAXY ✓ ✓ ✓ Note 8 Samsung GALAXY ✓ ✓ ✓ Note 9 Samsung GALAXY ✓ ✓ ✓ Note 10 Samsung GALAXY ✓ ✓ ✓ Note 10+ Samsung GALAXY ✓ ✓ ✓ Note 10+ 5G Supported for Samsung Photo Measure GALAXY ✓ ✗ ✗ but not Tab 4 (old) recommended Samsung Supported for -

A Review of the 1.4 Μm Pixel Generation Ray Fontaine Technology Analysis Group Chipworks Inc
A Review of the 1.4 µm Pixel Generation Ray Fontaine Technology Analysis Group Chipworks Inc. 3685 Richmond Road, Suite 500 Ottawa, Ontario, Canada K2H 5B7 [email protected] Abstract – The first 1.4 µm pixel generation CMOS image sensors version of its internal reset control (IRC) pixels to reduce the (CIS) began appearing in consumer-grade downstream products number of interconnect lines in its FI pixels [9]. in early 2009 with the majority of small pixel CIS innovators mass producing 1.4 µm pixel devices by the end of 2010. As TABLE I. PIXEL ARCHITECTURE BY COMPANY 1.1 µm pixel generation devices have entered mass production in early 2011, it is worth reviewing the enabling technologies found 1.4 µm Pixel Device Pixel Architecture Application in real world examples of 1.4 µm pixel devices. Manufacturer Sharing Aptina 4-shared 1.75T effective, Mobile phone CIS developers faced a fundamental decision when scaling IRC down from the 1.75 µm pixel generation: whether to extend front-illuminated (FI) technology or to develop back-illuminated OmniVision/TSMC 2-shared 2T effective Mobile phone (BI, or BSI) sensors. In both cases, the trend for small pixel CIS (BIa) devices has been the use of more advanced silicon wafer foundries, and a remarkable increase in materials integration Panasonic 4-shared 1.5T effective DSC and packaging innovation. Samsung 2-shared 2.5T effective Mobile phone Chipworks, as a supplier of competitive intelligence to the Samsung (BIa) 2-shared 2.5T effective DVC semiconductor and electronics industries, monitors the evolution of image sensor technologies as they come into production. -

System Requirements
System Requirements The following standards are recommended for each client computer accessing the Chrome River application. The application runs entirely within the web browser and does not require any additional Chrome River application code. Most modern web browsers and operating systems will be able to access and operate the application. However, Chrome River recommends that the user’s preferred browser and operating system configuration be verified to work consistently with the Chrome River application. NOTE: You may notice that there is a Chrome River App available on Google Store, Apple Store or similar sites. This app is NOT to be used. The CBS Chrome River application is only available by using this URL: https://chromeriver.cbs.com. Web Browser While other web browsers may also operate the Chrome River application successfully, the following are recommended for use in their most recent versions: Microsoft Version 11.0 or higher www.microsoft.com/windows/products/winfamily/ie/default.mspx Internet Explorer Google Version 51.0 or higher www.google.com/chrome Chrome Safari Version 9.1 or higher* for supported mobile www.apple.com/safari devices *Chrome River does not currently support the Safari browser in “Private” mode. Users must turn off Private mode before logging in to the application. Recommended Operating Systems and Browsers ANDROID MOBILE DEVICES Operating System: Kitkat 4.4.2 or higher Browser: Chrome v.51 or higher APPLE MOBILE DEVICES Operating System: iOS 9 or higher Browser: Safari 9.1 or higher WINDOWS PC DESKTOP/NOTEBOOK Operating System: Any HTML 5-supporting browser Browsers: • Chrome v.51 or higher • Internet Explorer 11 or higher APPLE DESKTOP/NOTEBOOK: Operating System: Any HTML 5-supporting browser Browser: Safari 9.1 or higher CERTIFIED VS SUPPORTED DEVICES Devices listed as certified are those on which Chrome River has tested and fixed any bugs. -
View the Slides
Firmware Insider Bluetooth Randomness is Mostly Random RANDOMNESS IS MY PASSION Jörn Tillmanns, Jiska Classen, Felix Rohrbach, Matthias Hollick Technische Universität Darmstadt, Germany ??? 2 How to acquire randomness? A: 42 B: Random Access Memory C: Random Only Memory D: Hardware RNG 3 RNG Variants 2 and 3 Device Chip Date Variant HRNG Location PRNG Cache Google Nexus 5 Dec 11 2012 2 0x314004, 3 regs Yes (inline) No MacBook 2016 Oct 22 2015 2 0x314004, 3 regs Yes (inline) No CYW20735B1 Jan 18 2018 3 0x352600, 3 regs Yes (rbg_get_psrng), Yes, breaks after 32 elements 8 registers CYW20819A1 May 22 2018 3 0x352600, 3 regs Yes (rbg_get_psrng), Yes (with minor fixes) 5 registers 4 RNG Variant 2 ● HRNG mapped to 0x314004 ● Three 4 byte registers ● Inline PRNG fallback ● No cache As seen on the MacBook Pro 2016 (BCM20703A2) and more... 5 RNG Variant 2, PRNG Fallback ● HRNG mapped to 0x314004 ● Three 4 byte registers ● Inline PRNG fallback ● No cache As seen on the MacBook Pro 2016 (BCM20703A2) and more... 6 How random is the PRNG? PRNG measurements taken on a Google Nexus 5 (BCM4335C0). 7 CVE Time! ...got assigned CVE-2020-6616 :) 8 Responsible Disclosure We: Why would you introduce and maintain a PRNG if you had a proper HRNG? Broadcom: Why should we use a PRNG when there is a HRNG in all of our devices? ??? 9 10 Let’s take a look at a few more devices... 11 Measuring the HRNG @fxrh says that Dieharder requires at least 1GB of data... 12 Optimizations ● Find a large free memory chunk that is not used while the chip is idle. -

Comparison: Android Vs IOS for Mediography
Comparison: Android vs IOS for mediography 2016.12 Pure Android Google phone iPhone 6s and later (Nexus 5x, Nexus 6, (iPhone 6s, iPhone 6s Plus, Nexus 6p, Pixel, Pixel XL) iPhone 7, iPhone 7 Plus) Works with Project Fi? 100%, Officially, no... (see my related article) including seamless switching Unofficially yes... between WiFi, US Cellular, but only as well as an iPhone Sprint and T-Mobile, can work solely with T-Mobile, including WiFi and including WiFi and T-Mobile’s coveted T-Mobile’s coveted 700 MHz band 700 MHz band. (It can’t use the US Cellular and Sprint networks —until if and when— Apple and Google make it official.) Over 130 countries Yes! Yes! with data roaming at no With Project Fi With Project Fi extra cost or T-Mobile (Simple Choice) or T-Mobile (Simple Choice) as your primary carrier. as your primary carrier. Allows 5GHz personal Yes! No! hotspot? (See this article) What’s up with that Apple? It has been four generations since you added 5 GHz to the original iPhone 5. It’s about time you make it available for the personal hotspot. Allows WiFi Analyzer Yes! No! or equivalent (See this article) Still photos Tie Tie Video with FiLMiC Pro, Tie Tie including 4K UHD at 100 megabits per second Mono direct native Recording quality is a tie. Recording quality is a tie. 48 kHz audio recording from a single digital Regarding Regarding microphone, using my confidence monitoring: confidence monitoring: recommended apps Unless the digital mic has its Latency for live audio monitoring own latency-free monitoring from latest iPhone models is feature (i.e. -

List Compatible Smartphones
Produkt App iOS Android AS80/C iPhone 7 Plus Samsung Galaxy S7 iPhone 7 Samsung Galaxy S6 iPhone 6s Plus Samsung Galaxy S5 iPhone 6s Samsung Galaxy S4 iPhone 6 Plus Samsung Galaxy S4 mini iPhone 6 Samsung Galaxy S3 AS81 iPhone 5s LG Google Nexus 5 iPhone 5c LG L40 iPhone 5 iPhone 4s iPad (4th generation) AW85 iPad (3rd generation) iPad mini iPod touch (5th generation) BC57 BC85 BF700 BF710 BF800 BM57 1/6 Produkt App iOS Android BM75 iPhone 7 Plus Samsung Galaxy S7 iPhone 7 Samsung Galaxy S6 iPhone 6s Plus Samsung Galaxy S5 iPhone 6s Samsung Galaxy S4 iPhone 6 Plus Samsung Galaxy S4 mini iPhone 6 Samsung Galaxy S3 BM77 iPhone 5s LG Google Nexus 5 iPhone 5c LG L40 iPhone 5 iPhone 4s iPad (4th generation) BM 85 iPad (3rd generation) iPad mini iPod touch (5th generation) GL50EVO BLE GL50EVO NFC GS485 PO60 Systemvoraussetzung: Bluetooth® 4.0, iOS ab 8.0 Bluetooth® 4.0, Android™ ab 4.4 Android™ ab Version 4.1 mit NFC-Funktion (Near Field Communication) 2/6 Produkt App iOS Android KS800 iPhone 7 Plus iPhone 7 iPhone 6s Plus iPhone 6s iPhone 6 Plus iPhone 6 iPhone 5s iPhone 5c iPhone 5 iPhone 4s iPad (4th generation) iPad (3rd generation) iPad mini Systemvoraussetzung: Bluetooth® 4.0, iOS ab 8.0 Produkt App iOS Android AS80/C iPhone 7 Plus Samsung Galaxy S7 iPhone 7 Samsung Galaxy S6 iPhone 6s Plus Samsung Galaxy S5 iPhone 6s Samsung Galaxy S4 iPhone 6 Plus Samsung Galaxy S4 mini iPhone 6 Samsung Galaxy S3 AS81 iPhone 5s LG Google Nexus 5 iPhone 5c LG L40 iPhone 5 iPhone 4s iPad (4th generation) BF700 iPad (3rd generation) iPad mini iPod touch -

Nokia 7.2 Is Designed to Offer Fans Advanced Tools to Express Their Creativity with a Powerful 48MP Triple Camera Featuring ZEISS Optics
Key features Key specifications1 Nokia 7.2 is designed to offer fans advanced tools to express their creativity with a powerful 48MP triple camera featuring ZEISS Optics. The ITEM SPECIFICATION smartphone combines stunning PureDisplay screen technology with SKU 1 ROW: GSM: 850, 900, 1800, 1900; WCDMA: 1, 5, 8; LTE: 1, 3, 5, 7, 8, Nokia 7.2 20, 28, 38, 40, 41 (120MHz) timeless Nordic design, in a class-defining package. NETWORK SKU 2 LATAM+US: GSM: 850, 900, 1800, 1900; WCDMA: 1, 2, 4, 5, 8; LTE: 1, BANDS 2, 3, 4, 5, 7, 8, 12/17, 13, 28, 66 Get creative with ZEISS Optics and powerful AI SKU 3 INDIA: GSM 900, 1800; WCDMA: 1, 5, 8; LTE: 1, 3, 5, 8, 40, 41 48MP triple camera with ZEISS Create shareworthy memories with intricate detail in both well lit and dim (120MHz) NETWORK Optics combined with state-of-the- conditions with Nokia 7.2’s triple camera featuring a highly sensitive 48MP SKU 1 & 2 LTE CAT6, SKU 3 LTE CAT 4 art PureDisplay sensor with Quad Pixel technology and ZEISS Optics and powerful AI. SPEED OS Android 9 Pie Portrait mode with unique ZEISS bokeh styles - ZEISS Modern, ZEISS Swirl CPU Qualcomm SDM660 and ZEISS Smooth - that recreate the way legendary ZEISS lenses produce RAM 4/6GB LPPDDR4x high visual impact and signature blur. STORAGE ROM: 64/128GB2 e-MMC 5.1, uSD supports to 512GB. Google Drive SIM Dual SIM + SD card slots (3 in 3) AI powered Night mode with image fusion and exposure stacking can 6.3" FHD+ Waterdrop, PureDisplay, Brightness (typ.) 500nits, contrast ratio sense whether hand held or on a tripod, adjusting the number of DISPLAY 1:1500, NTSC ratio 96%, SDR to HDR, HDR10 support for Amazon, Corning® exposures accordingly. -
Browser Support and Mobile App Requirements
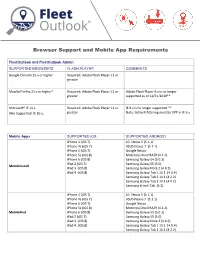
Browser Support and Mobile App Requirements FleetOutlook and FleetOutlook Admin SUPPORTED BROWSERS FLASH PLAYER COMMENTS Google Chrome 25.x or higher Required: Adobe Flash Player 11 or greater Mozilla Firefox 21.x or higher* Required: Adobe Flash Player 11 or Adobe Flash Player 9.x is no longer greater supported as of 12/31/2010** Microsoft® IE 11.x Required: Adobe Flash Player 11 or IE 9.x is no longer supported ** Also Supported: IE 10.x, greater Note: ActiveX Filtering must be OFF in IE 9.x Mobile Apps SUPPORTED iOS SUPPORTED ANDROID iPhone 4 (iOS 7) LG Nexus 5 (5.1.1) iPhone 4s (iOS 7) ASUS Nexus 7 (5.1.1) iPhone 5 (iOS 7) Google Nexus iPhone 5s (iOS 8) Motorola Droid RAZR (4.1.2) iPhone 6 (iOS 8) Samsung Galaxy S4 (5.0.1) iPad 2 (iOS 7) Samsung Galaxy S5 (5.0) MobileInstall iPad 3 (iOS 8) Samsung Galaxy Note 2 (4.4.2) iPad 4 (iOS 8) Samsung Galaxy Tab 1 10.1 (4.0.4) Samsung Galaxy Tab 2 10.1 (4.2.2) Samsung Galaxy Tab 3 10.1 (4.4.2) Samsung 8-inch Tab (4.2) iPhone 4 (iOS 7) LG Nexus 5 (5.1.1) iPhone 4s (iOS 7) ASUS Nexus 7 (5.1.1) iPhone 5 (iOS 7) Google Nexus iPhone 5s (iOS 8) Motorola Droid RAZR (4.1.2) MobileFind iPhone 6 (iOS 8) Samsung Galaxy S4 (5.0.1) iPad 2 (iOS 7) Samsung Galaxy S5 (5.0) iPad 3 (iOS 8) Samsung Galaxy Note 2 (4.4.2) iPad 4 (iOS 8) Samsung Galaxy Tab 1 10.1 (4.0.4) Samsung Galaxy Tab 2 10.1 (4.2.2) Samsung Galaxy Tab 3 10.1 (4.4.2) Samsung S3 (4.0.4) Samsung 8-inch Tab (4.2) iPhone 4 (iOS 6) LG Nexus 5 (5.1.1) iPhone 4s (iOS 6) ASUS Nexus 7 (5.1.1) iPhone 5 (iOS 7) Google Nexus iPhone 5s (iOS 8) Motorola Droid RAZR (4.1.2) iPhone 6 (iOS 8) Samsung Galaxy S4 (5.0.1) iPad 2 (iOS 7) Samsung Galaxy S5 (5.0) MobileNav iPad 3 (iOS 8) Samsung Galaxy Note 2 (4.4.2) iPad 4 (iOS 8) Samsung Galaxy Tab 1 10.1 (4.0.4) Samsung Galaxy Tab 2 10.1 (4.2.2) Samsung Galaxy Tab 3 10.1 (4.4.2) Samsung S3 (4.0.4) Samsung 8-inch Tab (4.2) ! Important: For all browsers you must enable JavaScript, cookies and SSL 3.0. -

These Phones Will Still Work on Our Network After We Phase out 3G in February 2022
Devices in this list are tested and approved for the AT&T network Use the exact models in this list to see if your device is supported See next page to determine how to find your device’s model number There are many versions of the same phone, and each version has its own model number even when the marketing name is the same. ➢EXAMPLE: ▪ Galaxy S20 models G981U and G981U1 will work on the AT&T network HOW TO ▪ Galaxy S20 models G981F, G981N and G981O will NOT work USE THIS LIST Software Update: If you have one of the devices needing a software upgrade (noted by a * and listed on the final page) check to make sure you have the latest device software. Update your phone or device software eSupport Article Last updated: Sept 3, 2021 How to determine your phone’s model Some manufacturers make it simple by putting the phone model on the outside of your phone, typically on the back. If your phone is not labeled, you can follow these instructions. For iPhones® For Androids® Other phones 1. Go to Settings. 1. Go to Settings. You may have to go into the System 1. Go to Settings. 2. Tap General. menu next. 2. Tap About Phone to view 3. Tap About to view the model name and number. 2. Tap About Phone or About Device to view the model the model name and name and number. number. OR 1. Remove the back cover. 2. Remove the battery. 3. Look for the model number on the inside of the phone, usually on a white label.