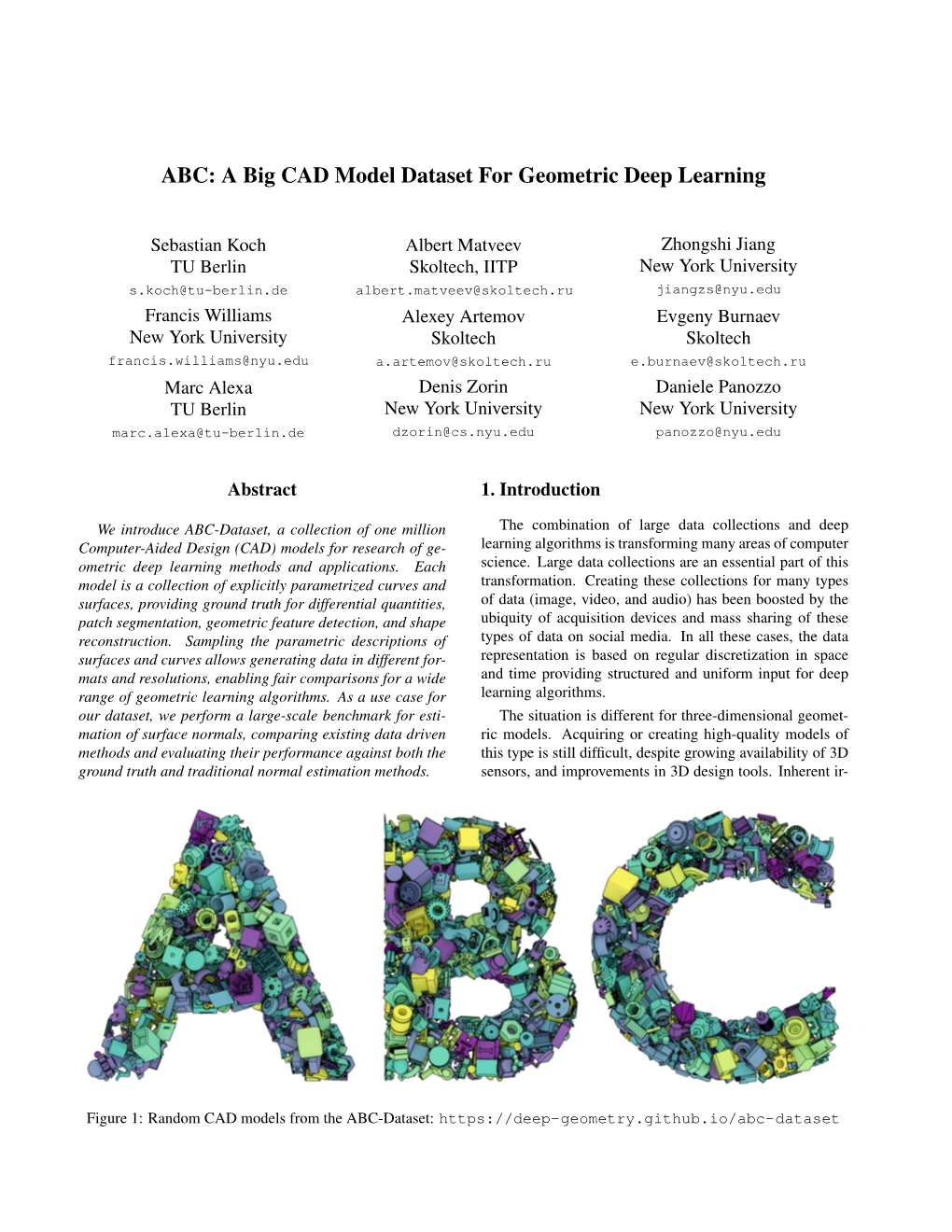
A Big CAD Model Dataset for Geometric Deep Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
CAD for College: Switching to Onshape for Engineering Design Tools
Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship Faculty & Staff Scholarship 6-2020 CAD for College: Switching to Onshape for Engineering Design Tools Kate N. Leipold Rochester Institute of Technology Follow this and additional works at: https://scholarworks.rit.edu/other Part of the Computer-Aided Engineering and Design Commons Recommended Citation Leipold, K. N. (2020, June), CAD for College: Switching to Onshape for Engineering Design Tools Paper presented at 2020 ASEE Virtual Annual Conference Content Access, Virtual On line. This Conference Paper is brought to you for free and open access by the Faculty & Staff Scholarship at RIT Scholar Works. It has been accepted for inclusion in Presentations and other scholarship by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Paper ID #30072 CAD for College: Switching to Onshape for Engineering Design Tools Ms. Kate N. Leipold, Rochester Institute of Technology (COE) Ms. Kate Leipold has a M.S. in Mechanical Engineering from Rochester Institute of Technology. She holds a Bachelor of Science degree in Mechanical Engineering from Rochester Institute of Technology. She is currently a senior lecturer of Mechanical Engineering at the Rochester Institute of Technology. She teaches graphics and design classes in Mechanical Engineering, as well as consulting with students and faculty on 3D solid modeling questions. Ms. Leipold’s area of expertise is the new product development process. Ms. Leipold’s professional experience includes three years spent as a New Product Development engineer at Pactiv Corporation in Canandaigua, NY. She holds 5 patents for products developed while working at Pactiv. -

CAD for VEX Robotics
CAD for VEX Robotics (updated 7/23/20) The question of CAD comes up from time to time, so here is some information and sources you can use to help you and your students get started with CAD. “COMPUTER AIDED DESIGN” OR “COMPUTER AIDED DOCUMENTATION”? First off, the nature of VEX in general, is a highly versatile prototyping system, and this leads to “tinkerbots” (for good or bad, how many robots are truly planned out down to the specific parts prior to building?). The team that actually uses CAD for design (that is, CAD is done before building), will usually be an advanced high school team, juniors or seniors (and VEX-U teams, of course), and they will still likely use CAD only for preliminary design, then future mods and improvements will be tinkered onto the original design. The exception is 3d printed parts (U-teams only, for now) which obviously have to be designed in CAD. I will say that I’m seeing an encouraging trend that more students are looking to CAD design than in the past. One thing that has helped is that computers don’t need to be so powerful and expensive to run some of the newer CAD software…especially OnShape. Here’s some reality: most VEX people look at CAD to document their design and create neat looking renderings of their robots. If you don't have the time to learn CAD, I suggest taking pictures. Seriously though, CAD stands for Computer Aided Design, not Computer Aided Documentation. It takes time to learn, which is why community colleges have 2-year degrees in CAD, or you can take weeks of training (paid for by your employer, of course). -
Onshape College Lesson 10: Design for Manufacturing: CNC Machining
Onshape College Lesson 10: Design for Manufacturing: CNC Machining ● Using the Hole Tool ● Using FeatureScript for spur gears ● Importing Solidworks Pack/Go files Concepts ● Direct editing an existing part (modify fillet, delete/move/replace face) ● An introduction to the Onshape App Store (through a look at a CAM app) Models ● Chopper - Drivetrain completed Mini Chopper Continued In this lesson, we are going to focus on the “guts” of our Chopper - the rotating motor drive assembly, the frame that it all mounts to, and all of the related gears, bushings, and shafts. In doing so, we will use the Hole Feature, and additional FeatureScript features to design the gear train, including a cool double gear. We will import new external files types, and then apply some Direct Modeling techniques to them. And finally, we will discuss design techniques for Computer Numerically Controlled (CNC) manufacturing processes, and then take a look at the Computer Aided Manufacturing (CAM) apps in the App Store. Design Intent Check: We’re going to start by making a Drivetrain Frame, highlighted below. The Drivetrain Frame houses the gears and hooks onto the Main Body. In the steps that follow, notice how we reference the Main Body when creating the Drivetrain Frame. 1. Start by creating a new sketch (rename it “Drivetrain Layout”) on the inside surface of the Main Body (highlighted in orange). The sketch is shown here twice, in the “Bottom” orientation; with and without the Main Body. Note the (blue) references between the screw bosses on the Main Body, and the circles in the sketch. -

Forrest Z. Shooster
Forrest Z. Shooster Phone: (954) 309-7960 Portfolio: https://portfolium.com/Argzero/portfolio Email: [email protected] Academics Rochester Institute of Technology – 3.76 GPA Magna Cum Laude » Majors: Biomedical Engineering & Game Design and Development Dean’s List every semester/quarter » Minors: Electrical Engineering & Japanese Student of the Honors Program Skills Software Tools Lab Skills or tools / Robot Control Experience » MATLAB, LabView, C#, python, C++, Ruby, Java, » Suspension, adherent, and 3D tissue growth, chicken embryo JavaScript, C, Apex, HTML/CSS, PHP, SQLite databases primary cell cultures (cardiomyocytes, neurons), mammalian » Unity and Unreal Game Engines, Qt (python and C++) cell transfection (CHO), western blotting, » Electronic and Mechanical CAD tools » Cell counting, hemocytometer, aseptic technique, E. coli (KiCAD, LTSPICE, Solidworks, OrCAD, OnShape) pGLO transformation, SDS/PAGE, DNA extraction, PCR, DNA » Microsoft Office (Excel, Word, Powerpoint), Overleaf, agarose gel electrophoresis, cell freezing Arduino, Energia, Visual Studio, Eclipse, Minitab, JMP » Light and fluorescent microscopy Hardware Design and Engineering Skills » Anatomy, quantitative physiology, histology, genetics » Machine Learning, Numerical Methods, and Biorobotics » Fluid mechanics, bioanalytical microfluidics, potentiostat » AC and DC circuit design and analysis, analog » Sensor characterization and evaluation, step response electronics, classical controls, analog and digital filters characterization, PID controllers, -

PRESS KIT Onshape
PRESS KIT Onshape ABOUT ONSHAPE (Brief) Onshape is the only company in the world 100% focused on cloud and mobile CAD, offering the first professional 3D CAD system that lets everyone on a design team work together using any web browser, phone, or tablet. Onshape was built from scratch for the way today’s engineers, designers and manufacturers really work, giving them secure and simultaneous access to a single master version of their CAD data without the hassles of software licenses or copying files. Based in Cambridge, Massachusetts, Onshape includes key members of the original SolidWorks team plus elite engineers from the cloud, data security and mobile industries. For more information, visit Onshape.com/press-room. ONSHAPE PRESS KIT 2 Onshape ABOUT ONSHAPE (Detailed) Onshape is the only company in the world 100% focused on cloud Companies worldwide rely on Onshape today to speed up the and mobile CAD, offering the first professional 3D CAD system that design of consumer electronics, mechanical machinery, medical lets everyone on a design team simultaneously work together using devices, machine parts, industrial equipment, and many other any web browser, phone, or tablet. Breaking away from the traditio- products. Onshape’s Free Plan also makes it the ideal CAD choice nal model of desktop-installed CAD, Onshape has data management for students and educators to collaborate inside and outside the and collaboration built in at its core. classroom. For the first time, the CAD system and CAD data live in one place Based in Cambridge, Massachusetts, Onshape includes key mem- in the cloud, and are never copied anywhere. -

Interactive Design Space Exploration and Optimization for CAD Models
Interactive Design Space Exploration and Optimization for CAD Models ADRIANA SCHULZ, JIE XU, and BO ZHU, Massachusetts Institute of Technology CHANGXI ZHENG and EITAN GRINSPUN, Columbia University WOJCIECH MATUSIK, Massachusetts Institute of Technology Precomputed Samples Interactive Exploration Parametric min stress Space CAD System Smooth interpolations Optimization Fig. 1. Our method harnesses data from CAD systems, which are parametric from construction and capture the engineer’s design intent, but require long regeneration times and output meshes with different combinatorics. We sample the parametric space in an adaptive grid and propose techniques to smoothly interpolate this data. We show how this can be used for shape optimization and to drive interactive exploration tools that allow designers to visualize the shape space while geometry and physical properties are updated in real time. Computer Aided Design (CAD) is a multi-billion dollar industry used by CCS Concepts: • Computing methodologies → Shape modeling; Shape almost every mechanical engineer in the world to create practically every analysis; Modeling and simulation; existing manufactured shape. CAD models are not only widely available Additional Key Words and Phrases: CAD, parametric shapes, simulation, but also extremely useful in the growing field of fabrication-oriented design because they are parametric by construction and capture the engineer’s precomputations, interpolation design intent, including manufacturability. Harnessing this data, however, ACM Reference format: is challenging, because generating the geometry for a given parameter Adriana Schulz, Jie Xu, Bo Zhu, Changxi Zheng, Eitan Grinspun, and Woj- value requires time-consuming computations. Furthermore, the resulting ciech Matusik. 2017. Interactive Design Space Exploration and Optimization meshes have different combinatorics, making the mesh data inherently dis- for CAD Models. -

Engineering Fundamentals 3D Modeling
Goals for today ● Overview of available design tools Engineering Fundamentals ● Conceptual Design vs Prototyping 3D Modeling vs Detail Design ● Learning to learn, investing Professor Will Schleter ● Whirlwind tour of OnShape April, 2019 EF 151 Workshop 3D Modeling Why Onshape? ● Parametric 3D Design ● Browser based, no software installation, cloud file storage ○ Onshape.com ● Created by group that left Solidworks ○ Autodesk Fusion 360 ● Sharing and collaboration ○ Autodesk Inventor ○ Solidworks ● Ease of use ○ OpenSCAD (scripting) ● Free educational license ● 3D Modeling ● Good online training ○ Blender ● Similar terminology and methodology to other systems ○ Sketchup ● Regular and frequent updates ○ 3D Builder (Windows) ○ Autocad Onshape Basics https://cad.onshape.com Invest in Yourself - Learn to learn ● Get an educational account ● Get excited about learning new things ● Viewing ● Continue to learn - ask questions, practice, be aware ● Sketching ● Teachers are guides ● Sketched Features ● Suggested online resource: ○ Extrude, Revolve, Sweep, Loft ○ Onshape Learning Center ● Combining Features ○ Self Paced ○ New, Add, Remove, Intersect ○ Learning Pathway ● Placed Features ○ CAD Fundamentals ■ Minimal - Navigating, Sketching, Part Design ○ Fillets, Chamfers, Shell, Draft, Rib, Patterns ■ Good info - Multi-parts, Assemblies ● Multiple Parts and Assemblies ■ Extra for certificate - Drawings ● Exporting for 3D Printing Frequently Used Keys and Mouse Commands Sketching Details Modifiers Dimensions ● alt-C - command search ● f - zoom to fit -
Infusing CAD and 3D Printing Into Curriculum to Enhance Instructional Strategy
Infusing CAD and 3D Printing into Curriculum to Enhance Instructional Strategy BY JOEL TOMLINSON AND ETAHE JOHNSON Department of Technology • Undergraduate Programs • Construction Management Technology • Electrical/Electronics Engineering Technology • Technology and Engineering Education • Graduate Programs • Career and Technology Education • Cybersecurity Engineering Technology Computer Aided Design (CAD) • CAD, or computer-aided design and drafting (CADD), is technology for design and technical documentation, which replaces manual drafting with an automated process. (AutoCAD, 2019) • There many different types of software packages aimed at specific users and target audience. • Selecting the right software to meet your needs is very important. Basic Design Process for Using a CAD Software and 3D Printing Idea Print Design Prepare Industry Applications of CAD • CAD software can be utilized in many different industry applications. • Construction, Architecture, and Building Information Modeling • Engineering Design, Organization, and Simulation • Product and production development • Virtual Reality • Fashion Merchandise • Health and Biological Sciences • Fine Arts and Graphics Design • Hobbyist and Entrepreneurs Examples of Infusing CAD and 3D Printing Into Curriculum • One doesn’t have to be an engineer to utilize CAD in curriculum. • The Departments of Technology and Human Ecology held a six week workshop with fashion merchandise students. • The goal of the workshop was to teach the fashion students to utilize CAD and 3D printing to design fashion accessories for a fashion show. The instructor was knowledgeable in CAD and 3D printing. 15 12 10 4 5 0 0 0 0 Strongly Disagree Neither Disagree Agree Strongly Agree Disagree Nor Agree Learning a CAD software program improved my undestanding of apparel construction. 8 7 7 7 6 5 4 3 2 1 1 1 0 0 Strongly Disagree Disagree Neither Disagree Nor Agree Strongly Agree Agree Computer Aided Design (CAD) is relevant in the Fashion Industry. -
Altair Simsolid Installation Guide P.2
Altair SimSolid 2019 Installation Guide Learn more at altairhyperworks.com Intellectual Property Rights Notice: Copyrights, Trademarks, Trade Secrets, Patents & Third Party Software Licenses Altair SimSolid™ Altair Engineering Canada LTD Copyright© 2014-2018. All Rights Reserved. Altair Engineering Copyright© 2018. All Rights Reserved. Special Notice: Pre-release versions of Altair software are provided ‘as is’, without warranty of any kind. Usage of pre-release versions is strictly limited to non-production purposes. solidThinking Platform: Altair INSPIRE™ 2019 ©2009-2018 including Altair INSPIRE Motion and Altair INSPIRE Structures Altair INSPIRE Extrude-Metal 2019 ©1996-2018 (formerly Click2Extrude®-Metal) Altair INSPIRE Extrude-Polymer 2019 ©1996-2018 (formerly Click2Extrude®-Polymer) Altair INSPIRE Cast 2019 ©2011-2018 (formerly Click2Cast®) Altair INSPIRE Form 2019 ©1998-2018 (formerly Click2Form®) Altair COMPOSE™ 2019 ©2007-2018 (formerly solidThinking Compose®) Altair ACTIVATE™ 2019 ©1989-2018 (formerly solidThinking Activate®) Altair EMBED™ 2019 ©1989-2018 (formerly solidThinking Embed®) o Altair EMBED SE 2019 ©1989-2018 (formerly solidThinking Embed® SE) o Altair EMBED/Digital Power Designer 2019 ©2012-2018 HyperWorks® Platform: HyperMesh® ©1990-2018; HyperCrash® ©2001-2018; OptiStruct® ©1996-2018; RADIOSS® ©1986- 2018; HyperView® ©1999-2018; HyperView Player® ©2001-2018; HyperMath® ©2007-2017; HyperStudy® ©1999-2018; HyperGraph® ©1995-2018; MotionView® ©1993-2018; MotionSolve® ©2002-2018; HyperForm® ©1998-2018; HyperXtrude® ©1999- 2018; Process Manager™ ©2003-2018; Templex™ ©1990-2018; TextView™ ©1996-2018; MediaView™ ©1999-2018; TableView™ ©2013-2018; BatchMesher™ ©2003-2018; HyperWeld® ©2009-2018; HyperMold® ©2009-2018; Manufacturing Solutions™ ©2005-2018; Durability Director™ ©2009-2018; Suspension Director™ ©2009-2018; AcuSolve® ©1997-2018; AcuConsole® ©2006-2018; SimLab® ©2004-2018; Virtual Wind Tunnel™ ©2012-2018; FEKO® (©1999-2014 Altair Development S.A. -
New Math the Hidden Cost of Swapping CAD Kernels
New Math The Hidden Cost of Swapping CAD Kernels Schnitger Corporation Schnitger Corporation Page 2 of 11 When we first wrote about the costs of switching CAD kernels a decade ago, we profiled a company that had twenty years’ worth of legacy designs to refresh. They could either find copies of the old software (and the hardware to run it on) or convert the parts to a new format and use a modern CAD system to move the designs forward. Old CAD on old hardware was a non-starter, leaving migrating everything to a new CAD system. But what to convert to? They already used SolidWorks in part of their business and considered moving the legacy parts to that platform. One big problem: Many of SolidWorks’ newest features rely on Dassault Systèmes’ 3DEXPERIENCE platform. The traditional desktop SolidWorks is built on the Parasolid kernel, while the 3DEXPERIENCE platform uses the CGM kernel. This reliance on two kernels leads many users to worry that building parts in SolidWorks will eventually mean a wholesale conversion from Parasolid to CGM. If you migrate everything today, will you have to do it again in a few years? As you’ll see later, converting from one kernel to another can be tricky so, if there is an opportunity to avoid a kernel change, you should investigate this possibility. The company we wrote about decided that it couldn’t afford the risk, disruption, and uncertainty an unclear future might cause. They chose Siemens Solid Edge, which also uses the Parasolid kernel. Sticking with the same kernel simplified moving their Parasolid-based models from one CAD tool to another. -

Designing New Age Disruptive Engineering Solutions
Designing New Age Disruptive Engineering Solutions Corporate Profile I January 2020 Copyright © 2020 nCircle Tech Pvt. Ltd. All Rights Reserved. www.ncircletech.com Envision. Enhance. Endure. Since 2012, nCircle Tech has empowered passionate innovators in the AEC and Manufacturing industry to create impactful 3D engineering & construction solutions. Leveraging our domain expertise in CAD-BIM, we provide disruptive solutions that reduce time to market and meet business goals. Our team of dedicated engineers, partner ecosystem and industry veterans are on a mission to redefine how you design, collaborate and visualize. 50+ Customers | 150+ Solutions I 15+ Countries Copyright © 2020 nCircle Tech Pvt. Ltd. All Rights Reserved. www.ncircletech.com Collaboration Embrace the power of many Robust ecosystem including experts from leaders in CAD, PLM, ML/AI Experience Impact Founded in 2012 with collective 5 million lines of code team of 130+ technologists and developed & 1 million hours of subject matter experts testing delivered with 30x Across CAD-BIM Lifecycle ROI Leading To An World of nfinite Disruptions www.ncircletech.com Step Into A World Of nfinite Possibilities Differentiating nCircle Copyright © 2020 nCircle Tech Pvt. Ltd. All Rights Reserved. www.ncircletech.com Industry Footprint Made in India | For Global Standards AEC Manufacturing 3D Visualization Copyright © 2020 nCircle Tech Pvt. Ltd. All Rights Reserved. www.ncircletech.com www.ncircletech.com Embracing The Power of Many Industry Partnerships Copyright © 2020 nCircle Tech Pvt. -

CAD for College: Switching to Onshape for Engineering Design Tools
Paper ID #30072 CAD for College: Switching to Onshape for Engineering Design Tools Ms. Kate N. Leipold, Rochester Institute of Technology Ms. Kate Leipold has a M.S. in Mechanical Engineering from Rochester Institute of Technology. She holds a Bachelor of Science degree in Mechanical Engineering from Rochester Institute of Technology. She is currently a senior lecturer of Mechanical Engineering at the Rochester Institute of Technology. She teaches graphics and design classes in Mechanical Engineering, as well as consulting with students and faculty on 3D solid modeling questions. Ms. Leipold’s area of expertise is the new product development process. Ms. Leipold’s professional experience includes three years spent as a New Product Development engineer at Pactiv Corporation in Canandaigua, NY. She holds 5 patents for products developed while working at Pactiv. Ms. Leipold’s focus at RIT is on CAD and design process instruction. c American Society for Engineering Education, 2020 Paper ID #30072 CAD for College: Switching to Onshape for Engineering Design Tools Ms. Kate N. Leipold, Rochester Institute of Technology (COE) Ms. Kate Leipold has a M.S. in Mechanical Engineering from Rochester Institute of Technology. She holds a Bachelor of Science degree in Mechanical Engineering from Rochester Institute of Technology. She is currently a senior lecturer of Mechanical Engineering at the Rochester Institute of Technology. She teaches graphics and design classes in Mechanical Engineering, as well as consulting with students and faculty on 3D solid modeling questions. Ms. Leipold’s area of expertise is the new product development process. Ms. Leipold’s professional experience includes three years spent as a New Product Development engineer at Pactiv Corporation in Canandaigua, NY.