Lecture Notes Collection
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 22 Fundamentalfundamental Propertiesproperties Ofof Antennasantennas
ChapterChapter 22 FundamentalFundamental PropertiesProperties ofof AntennasAntennas ECE 5318/6352 Antenna Engineering Dr. Stuart Long 1 .. IEEEIEEE StandardsStandards . Definition of Terms for Antennas . IEEE Standard 145-1983 . IEEE Transactions on Antennas and Propagation Vol. AP-31, No. 6, Part II, Nov. 1983 2 ..RadiationRadiation PatternPattern (or(or AntennaAntenna Pattern)Pattern) “The spatial distribution of a quantity which characterizes the electromagnetic field generated by an antenna.” 3 ..DistributionDistribution cancan bebe aa . Mathematical function . Graphical representation . Collection of experimental data points 4 ..QuantityQuantity plottedplotted cancan bebe aa . Power flux density W [W/m²] . Radiation intensity U [W/sr] . Field strength E [V/m] . Directivity D 5 . GraphGraph cancan bebe . Polar or rectangular 6 . GraphGraph cancan bebe . Amplitude field |E| or power |E|² patterns (in linear scale) (in dB) 7 ..GraphGraph cancan bebe . 2-dimensional or 3-D most usually several 2-D “cuts” in principle planes 8 .. RadiationRadiation patternpattern cancan bebe . Isotropic Equal radiation in all directions (not physically realizable, but valuable for comparison purposes) . Directional Radiates (or receives) more effectively in some directions than in others . Omni-directional nondirectional in azimuth, directional in elevation 9 ..PrinciplePrinciple patternspatterns . E-plane . H-plane Plane defined by H-field and Plane defined by E-field and direction of maximum direction of maximum radiation radiation (usually coincide with principle planes of the coordinate system) 10 Coordinate System Fig. 2.1 Coordinate system for antenna analysis. 11 ..RadiationRadiation patternpattern lobeslobes . Major lobe (main beam) in direction of maximum radiation (may be more than one) . Minor lobe - any lobe but a major one . Side lobe - lobe adjacent to major one . -

A Technical Assessment of Aperture-Coupled Antenna Technology
Running head: APERTURE-COUPLED ANTENNA TECHNOLOGY 1 A Technical Assessment of Aperture-coupled Antenna Technology Justin Obenchain A Senior Thesis submitted in partial fulfillment of the requirements for graduation in the Honors Program Liberty University Spring 2014 APERTURE-COUPLED ANTENNA TECHNOLOGY 2 Acceptance of Senior Honors Thesis This Senior Honors Thesis is accepted in partial fulfillment of the requirements for graduation from the Honors Program of Liberty University. ______________________________ Carl Pettiford, Ph.D. Thesis Chair ______________________________ Kyung K. Bae, Ph.D. Committee Member ______________________________ James Cook, Ph.D. Committee Member ______________________________ Brenda Ayres, Ph.D. Honors Director ______________________________ Date APERTURE-COUPLED ANTENNA TECHNOLOGY 3 Abstract Aperture coupling refers to a method of construction for patch antennas, which are specific types of microstrip antennas. These antennas are used in a variety of applications including cellular telephones, military radios, and other communications devices. The purpose of this thesis is to assess the benefits and drawbacks of aperture- coupled antenna technology. To develop a successful analysis of the patch antenna construction technique known as aperture coupling, this assessment begins by examining basic antenna theory and patch antenna design. After uncovering some of the fundamental principles that govern aperture-coupled antenna technology, a hypothesis is created and assessed based on the positive and negative aspects -

Radiometry and the Friis Transmission Equation Joseph A
Radiometry and the Friis transmission equation Joseph A. Shaw Citation: Am. J. Phys. 81, 33 (2013); doi: 10.1119/1.4755780 View online: http://dx.doi.org/10.1119/1.4755780 View Table of Contents: http://ajp.aapt.org/resource/1/AJPIAS/v81/i1 Published by the American Association of Physics Teachers Related Articles The reciprocal relation of mutual inductance in a coupled circuit system Am. J. Phys. 80, 840 (2012) Teaching solar cell I-V characteristics using SPICE Am. J. Phys. 79, 1232 (2011) A digital oscilloscope setup for the measurement of a transistor’s characteristic curves Am. J. Phys. 78, 1425 (2010) A low cost, modular, and physiologically inspired electronic neuron Am. J. Phys. 78, 1297 (2010) Spreadsheet lock-in amplifier Am. J. Phys. 78, 1227 (2010) Additional information on Am. J. Phys. Journal Homepage: http://ajp.aapt.org/ Journal Information: http://ajp.aapt.org/about/about_the_journal Top downloads: http://ajp.aapt.org/most_downloaded Information for Authors: http://ajp.dickinson.edu/Contributors/contGenInfo.html Downloaded 07 Jan 2013 to 153.90.120.11. Redistribution subject to AAPT license or copyright; see http://ajp.aapt.org/authors/copyright_permission Radiometry and the Friis transmission equation Joseph A. Shaw Department of Electrical & Computer Engineering, Montana State University, Bozeman, Montana 59717 (Received 1 July 2011; accepted 13 September 2012) To more effectively tailor courses involving antennas, wireless communications, optics, and applied electromagnetics to a mixed audience of engineering and physics students, the Friis transmission equation—which quantifies the power received in a free-space communication link—is developed from principles of optical radiometry and scalar diffraction. -

W5GI MYSTERY ANTENNA (Pdf)
W5GI Mystery Antenna A multi-band wire antenna that performs exceptionally well even though it confounds antenna modeling software Article by W5GI ( SK ) The design of the Mystery antenna was inspired by an article written by James E. Taylor, W2OZH, in which he described a low profile collinear coaxial array. This antenna covers 80 to 6 meters with low feed point impedance and will work with most radios, with or without an antenna tuner. It is approximately 100 feet long, can handle the legal limit, and is easy and inexpensive to build. It’s similar to a G5RV but a much better performer especially on 20 meters. The W5GI Mystery antenna, erected at various heights and configurations, is currently being used by thousands of amateurs throughout the world. Feedback from users indicates that the antenna has met or exceeded all performance criteria. The “mystery”! part of the antenna comes from the fact that it is difficult, if not impossible, to model and explain why the antenna works as well as it does. The antenna is especially well suited to hams who are unable to erect towers and rotating arrays. All that’s needed is two vertical supports (trees work well) about 130 feet apart to permit installation of wire antennas at about 25 feet above ground. The W5GI Multi-band Mystery Antenna is a fundamentally a collinear antenna comprising three half waves in-phase on 20 meters with a half-wave 20 meter line transformer. It may sound and look like a G5RV but it is a substantially different antenna on 20 meters. -

A Polarization Approach to Determining Rotational Angles of a Mortar
A POLARIZATION APPROACH TO DETERMINING ROTATIONAL ANGLES OF A MORTAR by Muhammad Hassan Chishti A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the requirements for the degree of Master of Science in Electrical and Computer Engineering Summer 2010 Copyright 2010 Muhammad Chishti All Rights Reserved A POLARIZATION APPROACH TO DETERMINING ROTATIONAL ANGLES OF A MORTAR by Muhammad Hassan Chishti Approved: __________________________________________________________ Daniel S. Weile, Ph.D Professor in charge of thesis on behalf of the Advisory Committee Approved: __________________________________________________________ Kenneth E. Barner, Ph.D Chair of the Department Electrical and Computer Engineering Approved: __________________________________________________________ Michael J. Chajes, Ph.D Dean of the College of Engineering Approved: __________________________________________________________ Debra Hess Norris, M.S Vice Provost for Graduate and Professional Education This thesis is dedicated to, My Sheikh Hazrat Maulana Mufti Muneer Ahmed Akhoon Damat Barakatuhum My Father Muhammad Hussain Chishti My Mother Shahida Chishti ACKNOWLEDGMENTS First and foremost, my all praise and thanks be to the Almighty Allah, The Beneficent, Most Gracious, and Most Merciful. Without His mercy and favor I would have been an unrecognizable speck of dust. I am exceedingly thankful to my advisor Professor Daniel S. Weile. It is through his support, guidance, generous heart, and mentorship that steered me through this Masters Thesis. Definitely one of the smartest people I have ever had the fortune of knowing and working. I am really indebted to him for all that. I would like to thank the Army Research Labs (ARL) in Aberdeen, MD for providing me the funding support to perform the research herein. -
Smith Chart Calculations
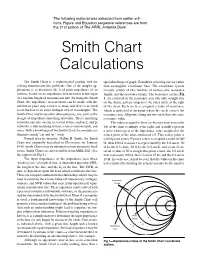
The following material was extracted from earlier edi- tions. Figure and Equation sequence references are from the 21st edition of The ARRL Antenna Book Smith Chart Calculations The Smith Chart is a sophisticated graphic tool for specialized type of graph. Consider it as having curved, rather solving transmission line problems. One of the simpler ap- than rectangular, coordinate lines. The coordinate system plications is to determine the feed-point impedance of an consists simply of two families of circles—the resistance antenna, based on an impedance measurement at the input family, and the reactance family. The resistance circles, Fig of a random length of transmission line. By using the Smith 1, are centered on the resistance axis (the only straight line Chart, the impedance measurement can be made with the on the chart), and are tangent to the outer circle at the right antenna in place atop a tower or mast, and there is no need of the chart. Each circle is assigned a value of resistance, to cut the line to an exact multiple of half wavelengths. The which is indicated at the point where the circle crosses the Smith Chart may be used for other purposes, too, such as the resistance axis. All points along any one circle have the same design of impedance-matching networks. These matching resistance value. networks can take on any of several forms, such as L and pi The values assigned to these circles vary from zero at the networks, a stub matching system, a series-section match, and left of the chart to infinity at the right, and actually represent more. -
Path Loss and Shadowing 2017
Path-loss and Shadowing (Large-scale Fading) PROF. MICHAEL TSAI 2017/10/23 Friis Formula TX Antenna RX Antenna �"�"�- × � ⇒ � = � - 0 4��+ EIRP=�"�" % Power spatial density &' 1 × 4��+ 2 � � � � = � � - Antenna Aperture � 4��+ • Antenna Aperture=Effective Area �� • Isotropic Antenna’s effective area � ≐ �,��� �� • Isotropic Antenna’s Gain=1 �� • � = � �� � � � � �� � � � • Friis Formula becomes: � = � � � = � � � � ��� � ���� 3 � � � �� Friis Formula � = � � � � ��� � �� • is often referred as “Free-Space Path Loss” (FSPL) ��� � • Only valid when d is in the “far-field” of the transmitting antenna • Far-field: when � > ��, Fraunhofer distance ��� • � = , and it must satisfies � ≫ � and � ≫ � � � � � • D: Largest physical linear dimension of the antenna • �: Wavelength • We often choose a �� in the far-field region, and smaller than any practical distance used in the system � � • Then we have � � = � � � � � � � 4 Received Signal after Free-Space Path Loss phase difference due to propagation distance ���� � ������� − � � � = �� �N � ��� ���� � ��� � Free-Space Path Loss Carrier (sinusoid) Complex envelope 5 Example: Far-field Distance • Find the far-field distance of an antenna with maximum dimension of 1m and operating freQuency of 900 MHz (GSM 900) • Ans: • Largest dimension of antenna: D=1m • Operating FreQuency: f=900 MHz � �×��� • Wavelength: � = = = �. �� � ���×��� ��� � • � = = = �. �� (m) � � �.�� 6 Example: FSPL • If a transmitter produces 50 watts of power, express the transmit power in units of (a) dBm and (b) dBW. • If 50 watts -

Optimum Partitioning of a Phased-MIMO Radar Array Antenna
Optimum Partitioning of a Phased-MIMO Radar Array Antenna Ahmed Alieldin, Student Member, IEEE; Yi Huang, Senior Member, IEEE; and Walid M. Saad as it can significantly improve system identification, target Abstract—In a Phased-Multiple-Input-Multiple-Output detection and parameters estimation performance when (Phased-MIMO) radar the transmit antenna array is divided into combined with adaptive arrays. It can also enhance transmit multiple sub-arrays that are allowed to be overlapped. In this beam pattern design and use available space efficiently which paper a mathematical formula for optimum partitioning scheme is most suitable for airborne or ship-borne radars [7]. is derived to determine the optimum division of an array into sub-arrays and number of elements in each sub-array. The main However, because the antennas are collocated, the main concept of this new scheme is to place the transmit beam pattern drawback is the loss of space diversity that is needed to nulls at the diversity beam pattern peak side lobes and place the mitigate the effect of target fluctuations. This problem could diversity beam pattern nulls at the transmit beam pattern peak be solved using phased-MIMO radar [3]. But the main side lobes. This is compared with other equal and unequal question is how to divide array elements into sub-arrays to schemes. It is shown that the main advantage of this optimum achieve the optimum performance. partitioning scheme is the improvement of the main-to-side lobe levels without reduction in beam pattern directivity. Also signal- This paper proposes an optimum partitioning scheme for to-noise ratio is improved using this optimum partitioning phased-MIMO radar and is organized as follows: Section II scheme. -

Resolving Interference Issues at Satellite Ground Stations
Application Note Resolving Interference Issues at Satellite Ground Stations Introduction RF interference represents the single largest impact to robust satellite operation performance. Interference issues result in significant costs for the satellite operator due to loss of income when the signal is interrupted. Additional costs are also encountered to debug and fix communications problems. These issues also exert a price in terms of reputation for the satellite operator. According to an earlier survey by the Satellite Interference Reduction Group (SIRG), 93% of satellite operator respondents suffer from satellite interference at least once a year. More than half experience interference at least once per month, while 17% see interference continuously in their day-to-day operations. Over 500 satellite operators responded to this survey. Satellite Communications Overview Satellite earth stations form the ground segment of satellite communications. They contain one or more satellite antennas tuned to various frequency bands. Satellites are used for telephony, data, backhaul, broadcast, community antenna television (CATV), internet, and other services. Depending on the application, each satellite system may be receive only or constructed for both transmit and receive operations. A typical earth station is shown in figure 1. Figure 1. Satellite Earth Station Each satellite antenna system is composed of the antenna itself (parabola dish) along with various RF components for signal processing. The RF components comprise the satellite feed system. The feed system receives/transmits the signal from the dish to a horn antenna located on the feed network. The location of the receiver feed system can be seen in figure 2. The satellite signal is reflected from the parabolic surface and concentrated at the focus position. -

Two- and Three-Loop Superdirective Receiving Antennas Elwin W
JOURNAL OF RESEARCH of the National Bureau of Standards-D. Radio Propagation Vol. 67D, No. 2, March- April 1963 Two- and Three-Loop Superdirective Receiving Antennas Elwin W. Seeley Contribution from U .S. Naval Ordnance Laboratory, Corona, California (R eceived June 11 , 1962; revised August 2, 1962) The characteristics of two- and three-loop superdirect ive a ntenn a arrays arc presenled . At VLF, t his type of array appears to h ave m any d esirab le qua li t ies, and the usua l dctr'i mental ch a racteristics associated wi th superdirectivity are less in evidence. It is shown that the beamwidth is n arrowest, the front-to-back voltage and power ratios m' e greatest, a nd the position of t he back lobes and nulls are most invaria nt whf'n closel.v spaeed loops are used . Inequalities in signals from the individua l loops tend to obscure t he fr ont a nd back lobe' and limit t he proxim ity of the loops. List of Symbols E q,= relalive volLtLge received frorn di rec tion </> compared to voltage Crolll one loop. </> = angle of received sign<Ll in the horizontal plane f!"om the vertical phtll e in ",hiclt th e loops are located. 2'/fD cos rf> 1/; =- A D = distal1ce beLween loops A= free space wavelength - il = phase delay between loop </>0 = null position </>l= position of side lobe maximum R1= ratio of front lobe to side lobe ampliLude Ro= ratio of Jront lobe to back lobe amplitud e Rp=ratio of power collected by the fronL lobe to thaL colleeled b ~- the back lobes I = current in the loop antenna 77 = 1207r, intrinsic impedance of space A = area of loop {3 = 27r/A 8= angle in the plane of the loop r = radius of loop ro = radius of wire used to maIm loop ZL= input impedance of loop VL = loop voltage E,=free space radiation field. -

A THEORETICAL STUDY of LOW SIDE LOBE ANTENNA ARRAYS By
A THEORETICAL STUDY OF LOW SIDE LOBE ANTENNA ARRAYS by Brian Robert Gladman A thesis submitted to the University of London for Examination for the degree of Doctor of Philosophy (September 1975)• Work carried out at the Admiralty Surface Weapons Establishment. -1- ABSTRACT This thesis presents theoretical work undertaken in support of a research programme on low side lobe antenna arrays. In particular it presents results on the effects of mutual coupling on the performance of microwave arrays that consist of a number of identical radiating elements fed by a wide-band power dividing network. Low side lobe distributions are reviewed and the effects of various types of distributional error are derived. A simplified but representative array geometry is described for which a detailed analysis of mutual coupling is possible. Results are given for the element patterns in a finite array which clearly show the influence of mutual coupling and also the distortion in the patterns for elements close to the array edges. Array patterns obtained from low side lobe distri- butions are given. In studying the effects of inter-action between the array and its feed network, a set of 'aperture modes' are discovered that are orthogonal and uncoupled. These modes have a number of interesting properties and are shown to provide a pattern synthesis technique that can take account of the effects of mutual coupling between the array elements. The synthesis of multiple beam networks for producing these modes is covered. A number of potential wide-band feed networks are considered using both directional couplers and shunt coaxial junctions for power division. -

Exp-1: Understand the Pathloss Prediction Formula
Exp-1: Understand the pathloss prediction formula. Aim To understand the pathloss prediction formula Objectives 1. Calculation of received signal strength as a function of distance of separation between transmitter and receiver. 2. To understand the impact of the following parameters on received signal strength. (a) Transmitter Power (b) Path loss exponent, (c) Carrier frequency, (d) Receiver antenna height, (e) Transmitter antenna height. 1 Theory for Experiment 1:-Understand the pathloss prediction formula. The design of a communication system involves selection of values for several parameters. One of the important parameter is the transmit power. Higher transmit power ensures large allowable separation distance between the transmitter (Tx) and receiver(Rx). Of course the loss in signal power per unit distance depends on the properties of the medium. In case of wireless communication on one hand it is desired to have a very large coverage (large allowable separation between Txand Rx) on the other hand it is also desired that co-channel interference be as low as possible.An understanding of the large scale propagation effects is very important for design of suitable communication system. In terrestrial mobile communication system, electro-magnetic wave propagation is affected by reflection, diffraction and scattering. These lead to dynamic variation of signal strength as a function of time, frequency, distance of separation, antenna height, antenna configuration, local scattering environment etc. Propagation models are necessary in order to predict the received signal strength for a given set of parameters as mentioned above. These models can be broadly considered under:- • Large scale Fading Model. • Small Scale Fading Model.