Xenuspluscompact Ethercat
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Literature Review in the Fields of Standards, Projects, Industry and Science
LITERATURE REVIEW IN THE FIELDS OF STANDARDS, PROJECTS, INDUSTRY AND SCIENCE DOCUMENT TYPE: DELIVERABLE DELIVERABLE N0: D1.1 DISTRIBUTION LEVEL: PUBLIC DATE: 11/07/2016 VERSION: FINAL AUTHOR(S): LEONID LICHTENSTEIN, FLORIAN RIES, MICHAEL VÖLKER, JOS HÖLL, CHRISTIAN KÖNIG (TWT); JOSEF ZEHETNER (AVL); OLIVER KOTTE, ISIDRO CORAL, LARS MIKELSONS (BOSCH); NICOLAS AMRINGER, STEFFEN BERINGER, JANEK JOCHHEIM, STEFAN WALTER (DSPACE); CORINA MITROHIN, NATARAJAN NAGARAJAN (ETAS); TORSTEN BLOCHWITZ (ITI); DESHENG FU (LUH); TIMO HAID (PORSCHE); JEAN- MARIE QUELIN (RENAULT); RENE SAVELSBERG, SERGE KLEIN (RWTH); PACOME MAGNIN, BRUNO LACABANNE (SIEMENS); VIKTOR SCHREIBER (TU-IL); MARTIN KRAMMER, NADJA MARKO, MARTIN BENEDIKT, STEFAN THONHOFER, GEORG STETTINGER, MARKUS TRANNINGER (VIF); THIES FILLER (VW) REVIEWED: BRUNO LACABANNE (SIEMENS), JEAN-MARIE QUELIN (RENAULT), VALENTIN IVANOV (TUIL), JOSEF ZEHETNER (AVL), NADJA MARKO (VIF) APPROVED: LEONID LICHTENSTEIN (TWT), MARTIN BENEDIKT (VIF) D1.1 ACOSAR PROJECT ACRONYM: ACOSAR PROJECT TITLE: ADVANCED CO-SIMULATION OPEN SYSTEM ARCHITECTURE ITEA PROJECT N0: 14004 CHALLENGE: ENGINEERING PROJECT DURATION: 01/09/2015 - 31/08/2018 PROJECT WEBSITE: WWW.ACOSAR.EU COORDINATION: VIRTUAL VEHICLE RESEARCH CENTER (AT) PROJECT LEADER: DR. MARTIN BENEDIKT 14004 – Deliverable D1.1 – Distribution Level: Public 2 / 126 D1.1 ACOSAR 14004 – Deliverable D1.1 – Distribution Level: Public 3 / 126 D1.1 ACOSAR 1 Contents 1 Contents....................................................................................................................... -

Protingų Namų Kūrimas Naudojant Daiktų Interneto Sistemas
VILNIAUS UNIVERSITETAS MATEMATIKOS IR INFORMATIKOS FAKULTETAS INFORMATIKOS INSTITUTAS KOMPIUTERINIO IR DUOMENŲ MODELIAVIMO KATEDRA Bakalauro baigiamasis darbas Protingų namų kūrimas naudojant daiktų interneto sistemas Atliko: Katalyna Aniščenkienė parašas Vadovas: lekt. Eduardas Kutka Vilnius 2019 Turinys Sutartinis terminų žodynas 3 Santrauka 4 Summary 5 Įvadas 6 1. Išmaniųjų namų technologijos 7 1.1. Protingi namai . 7 1.2. Daiktų internetas . 9 1.3. Įrenginiai ir kiti sprendimai . 11 2. Naudojamos technologijos 14 2.1. Vienos plokštės kompiuteris . 14 2.2. Komponentai . 16 3. Prototipo kūrimas 18 3.1. Elektrinių grandinių prototipavimas . 18 3.2. Komponentų integravimas į vienos plokštės kompiuterį . 19 3.3. Sistemos struktūra ir funkcionalumas . 21 Išvados ir rekomendacijos 23 2 Sutartinis terminų žodynas 1. Bluetooth - mažo nuotolio belaidė technologija, suteikianti galimybę be laidų perduoti duo- menis iš vieno skaitmeninio įrenginio į kitą. 2. Wi-Fi - belaidžio ryšio technologija. 3. Ethernet - kompiuterių tinklų technologija lokaliems tinklams. 4. RS232 - nuoseklioji sąsaja, kurioje duomenys yra perduodami bipoliariais įtampos impul- sais, tam kad sujungti kompiuterį ir su juo susijusį įrenginį. 5. RS485 - diferencialinė sąsaja veikianti pusiau dvipusiu režimu, kur duomenų perdavimas ir priėmimas vyksta skirtingais laiko momentais viena laidų pora. 6. IPv6 - interneto protokolas, kuris naudoja 128-ių bitų adresą ir gali apdoroti didesnį kiekį adresų nei IPv4. 7. 6LowPAN - IPv6 per mažos galios belaidis asmeninės zonos tinklas. Tai vienintelė vietinė technologija, padedanti aplikacijai pereiti į daiktų internetą. 8. Cisco - JAV tarptautinė kompanija, kuri kuria ir pardavinėja tinklo bei duomenų perdavimo ir telekomunikacijų įrangą. 9. BLE - mažos galios Bluetooth (angl. Bluetooth Low Energy), tai asmeninio tinklo tech- nologija, sukurta taip, kad išlaikytų tokį patį ryšį, tuo pačiu gerokai sumažinant energijos suvartojimą ir kainą. -

SIPART PS2 with PROFIBUS PA (6DR55..)
SIPART Electropneumatic positioners SIPART PS2 with PROFIBUS PA (6DR55..) Operating Instructions Edition 02/2016 Answers for industry. Introduction 1 Safety information 2 3 SIPART Description Installing/mounting 4 Electropneumatic positioner SIPART PS2 with PROFIBUS PA Connect 5 Operation 6 Operating Instructions Commissioning 7 Functional safety 8 Parameter assignment 9 Functions/operations using PROFIBUS PA 10 Alarm, fault and system messages 11 Service and maintenance 12 Technical data 13 Dimension drawings 14 6DR55.. Spare parts / accessories / scope of delivery 15 Appendix A 02/2016 B A5E00127926-AB Abbreviations Legal information Warning notice system This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are graded according to the degree of danger. DANGER indicates that death or severe personal injury will result if proper precautions are not taken. WARNING indicates that death or severe personal injury may result if proper precautions are not taken. CAUTION indicates that minor personal injury can result if proper precautions are not taken. NOTICE indicates that property damage can result if proper precautions are not taken. If more than one degree of danger is present, the warning notice representing the highest degree of danger will be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property damage. Qualified Personnel The product/system described in this documentation may be operated only by personnel qualified for the specific task in accordance with the relevant documentation, in particular its warning notices and safety instructions. -

Remote Home Automation
Remote Home Automation A PROJECT REPORT submitted by Anindya Maiti (08BCE042) in partial fulfillment for the award of B. Tech degree in Computer Science and Engineering School of Computing Science and Engineering May - 2012 School of Computing Science and Engineering DECLARATION I hereby declare that the project entitled “Remote Home Automation” submitted by me to the School of Computing Science and Engineering, VIT University, Vellore-14 in partial fulfillment of the requirements for the award of the degree of Bachelor of Technology in Computer Science and Engineering is a record of bonafide work carried out by me under the supervision of Prof. S. Sivanesan. I further declare that the work reported in this project has not been submitted and will not be submitted, either in part or in full, for the award of any other degree or diploma of this institute or of any other institute or university. Anindya Maiti (08BCE042) ii School of Computing Science and Engineering CERTIFICATE The project report entitled “Remote Home Automation” is prepared and submitted by Anindya Maiti (Register No: 08BCE042). It has been found satisfactory in terms of scope, quality and presentation as partial fulfillment of the requirements for the award of the degree of Bachelor of Technology in Computer Science and Engineering in VIT University, India. ____________________________________________ Prof. S. Sivanesan School of Computing Science and Engineering Examined by: Internal Examiner External Examiner iii iv ACKNOWLEDGEMENT I would like to express my earnest gratitude to my project guide Prof. S. Sivanesan, School of Computing Science and Engineering, for giving me the opportunity to undertake the project under his supervision. -
Remotely Connected Secure Remote Monitoring for Internet of Things Applications Table of Contents
WHITE PAPER REMOTELY CONNECTED SECURE REMOTE MONITORING FOR INTERNET OF THINGS APPLICATIONS TABLE OF CONTENTS INTRODUCTION 3 ANATOMY OF AN IOT SECURE REMOTE MONITORING SOLUTION 4 ARUBA IOT REMOTE MONITORING SOLUTIONS 8 USE CASES 14 CONCLUSION 20 REFERENCES 20 WHITE PAPER REMOTELY CONNECTED INTRODUCTION Once data visibility and security have been achieved we can In a provocative 2015 report, Gartner analysts Karamouzis, begin to reap the business benefits of IoT.5 For example, IoT Jivan, and Notardonato opined that the rise of smart data can drive profitability by helping merchants better machines, cognitive technologies, and algorithmic business understand customers and their preferences. IoT can also models could render obsolete the competitive advantage of enhance productivity through process improvement, and the offshoring.1 Hyper-automation, the analysts argued, will trump empowerment of the people who run them.6 labor arbitrage in driving profitability and enhancing The Internet of Things Value Cycle (Figure 1) shows the interplay productivity. Smart machines will accomplish this by between visibility, security, profitability, and productivity. classifying content, finding patterns, and extrapolating Achieving adequate visibility and security are critical challenges generalizations from those patterns. The eyes and ears of for most IoT deployments and organizations. smart machines will be the Internet of Things (IoT), the so-called “digital mesh,” which will be given voice by secure A simple case in point shows why. Operational technology connectivity infrastructure.2, 3 (OT) data are rich with insights about processes and device performance. Having access to these data could enhance a Labor arbitrage aside, there is no denying the central role of variety of applications and services including, among others, IoT on the journey to run businesses more efficiently, supply chain efficiency, inventory management, and predictive productively, and profitably. -
Estudio De Una Aplicación Domótica Para La Gestión De Una Vivienda Vía Satélite
Proyecto Fin de Carrera Estudio de una aplicación domótica para la gestión de una vivienda vía satélite Autor Alexandra Ubau Rubio Director Jean-Claude Patalano Ponente Jesús Alastruey Benedé Escuela de Ingeniería y Arquitectura Zaragoza, Febrero de 2014 Agradecimientos A Jean-Claude Patalano, a todo el departamento de RF/AR del CNES y a Jesús Alastruey Benedé por su ayuda, seguimiento y dedicación durante el desarrollo del proyecto. A mi familia, especialmente a mis padres y a mi hermana por estar a mi lado en los momentos más difíciles a lo largo de todos estos años. A mis amigos y compañeros de carrera por acompañarme durante todo este tiempo lleno de buenos y no tan buenos momentos. Resumen La proliferación de dispositivos tecnológicos para el hogar y su rápida evolución ha aumentado el interés de conectar todos ellos en red para integrarlos en un sistema de monitorización y control y poder gestionarlos de forma centralizada. En este trabajo se estudia el control de una vivienda desde cualquier parte del mundo. En este contexto, el organismo gubernamental francés CNES (Centro Nacional de Estudios Espaciales), encargado del desarrollo espacial en Francia, propone el estudio del envío de la información necesaria para la gestión de una vivienda a través del enlace vía satélite. Es evidente que no se trata del medio óptimo para ello, pero hay casos en los que, aunque el retardo sea elevado, lo verdaderamente importante es que exista la posibilidad de comunicarse, siendo éste el objetivo último de los estudios que se realizan dentro del departamento de Radiofrecuencias y Aplicaciones Telemáticas en el que tuvo lugar mi estancia en dicha empresa. -

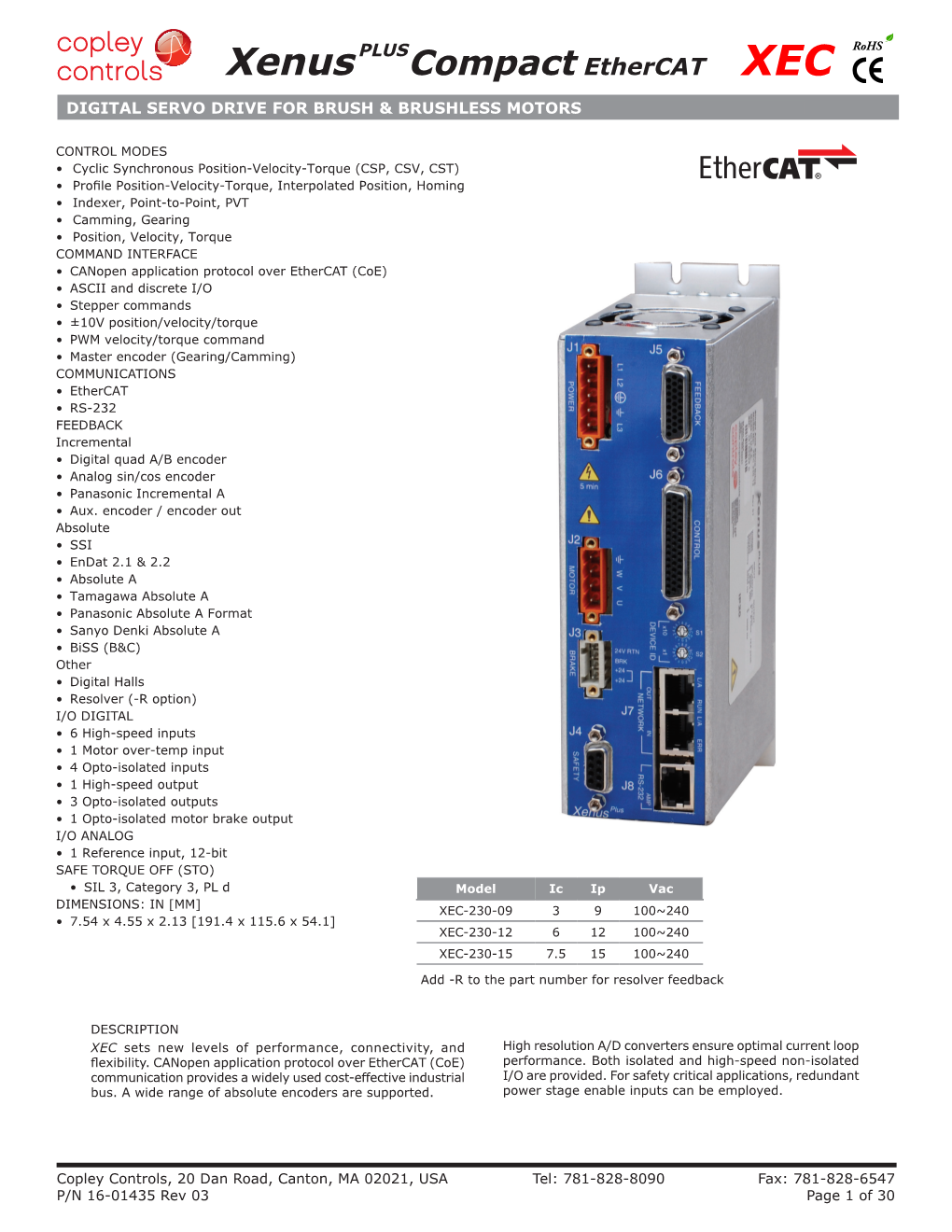
Xenuspluscompact Ethercat
PLUS Xenus Compact EtherCAT XEC DIGITAL SERVO DRIVE FOR BRUSH & BRUSHLESS MOTORS CONTROL MODES • Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST) • Profile Position-Velocity-Torque, Interpolated Position, Homing • Indexer, Point-to-Point, PVT • Camming, Gearing • Position, Velocity, Torque COMMAND INTERFACE • CANopen application protocol over EtherCAT (CoE) • ASCII and discrete I/O • Stepper commands • ±10V position/velocity/torque • PWM velocity/torque command • Master encoder (Gearing/Camming) COMMUNICATIONS • EtherCAT • RS-232 FEEDBACK Incremental • Digital quad A/B encoder • Analog sin/cos encoder • Panasonic Incremental A • Aux. encoder / encoder out Absolute • SSI • EnDat 2.1 & 2.2 • Absolute A • Tamagawa Absolute A • Panasonic Absolute A Format • Sanyo Denki Absolute A • BiSS (B&C) Other • Digital Halls • Resolver (-R option) I/O DIGITAL • 6 High-speed inputs • 1 Motor over-temp input • 4 Opto-isolated inputs • 1 High-speed output • 3 Opto-isolated outputs • 1 Opto-isolated motor brake output I/O ANALOG • 1 Reference input, 12-bit SAFE TORQUE OFF (STO) • SIL 3, Category 3, PL d Model Ic Ip Vac DIMENSIONS: IN [MM] XEC-230-09 3 9 100~240 • 7.54 x 4.55 x 2.13 [191.4 x 115.6 x 54.1] XEC-230-12 6 12 100~240 XEC-230-15 7.5 15 100~240 Add -R to the part number for resolver feedback DESCRIPTION XEC sets new levels of performance, connectivity, and High resolution A/D converters ensure optimal current loop flexibility. CANopen application protocol over EtherCAT (CoE) performance. Both isolated and high-speed non-isolated communication provides a widely used cost-effective industrial I/O are provided. -

A Resource-Efficient IP-Based Network Architecture for In-Vehicle
Technische Universitat¨ Munchen¨ Lehrstuhl fur¨ Medientechnik A Resource-Efficient IP-based Network Architecture for In-Vehicle Communication Dipl.-Ing. Univ. Mehrnoush Rahmani Vollstandiger¨ Abdruck der von der Fakultat¨ fur¨ Elektrotechnik und Informationstechnik der Technischen Universitat¨ Munchen¨ zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr. sc. techn. Andreas Herkersdorf Prufer¨ der Dissertation: 1. Univ.-Prof. Dr.-Ing. Eckehard Steinbach 2. Prof. Dr. rer. nat. Ernst W. Biersack Grande Ecole Telecom Paris/ Frankreich Die Dissertation wurde am 16.03.2009 bei der Technischen UniversitatM¨ unchen¨ eingereicht und durch die Fakultat¨ fur¨ Elektrotechnik und Informationstechnik am 19.06.2009 angenommen. Acknowledgment This dissertation was written during my time as PhD student and research member in the network archi- tecture group at BMW Research and Technology and at the Institute for Media Technology at Technische Universitat¨ Munchen¨ (TUM). I am grateful to both institutes to give me the opportunity for this work. This thesis is the result of three years of work whereby I have been accompanied and supported by many people. It is a pleasure to have the opportunity to express my gratitude to all of them. First, I would like to thank my PhD adviser Prof. Dr.-Ing. Eckehard Steinbach for accepting to supervise me as an external PhD student and for his continuous support. I am grateful to him for his many sugges- tions and for being available whenever I needed his advise. His constructive way of work taught me how to carry on in all difficult situations. I owe him lots of gratitude for challenging me and showing me how to progress. -

Protocol Analysis
1 2 3 4 5 6 7 8 9 This Specification is provided for future development work within oneM2M only. The Partners accept no 10 liability for any use of this Specification. 11 The present document has not been subject to any approval process by the oneM2M Partners Type 1. 12 Published oneM2M specifications and reports for implementation should be obtained via the oneM2M 13 Partners' Publications Offices. 14 15 16 © oneM2M Partners Type 1 (ARIB, ATIS, CCSA, ETSI, TIA, TTA, TTC) Page 1 of 107 This is a draft oneM2M document and should not be relied upon; the final version, if any, will be made available by oneM2M Partners Type 1. 17 About oneM2M 18 The purpose and goal of oneM2M is to develop technical specifications which address the 19 need for a common M2M Service Layer that can be readily embedded within various 20 hardware and software, and relied upon to connect the myriad of devices in the field with 21 M2M application servers worldwide. 22 More information about oneM2M may be found at: http//www.oneM2M.org 23 Copyright Notification 24 No part of this document may be reproduced, in an electronic retrieval system or otherwise, 25 except as authorized by written permission. 26 The copyright and the foregoing restriction extend to reproduction in all media. 27 © 2014, oneM2M Partners Type 1 (ARIB, ATIS, CCSA, ETSI, TIA, TTA, TTC). 28 All rights reserved. 29 Notice of Disclaimer & Limitation of Liability 30 The information provided in this document is directed solely to professionals who have the 31 appropriate degree of experience to understand and interpret its contents in accordance with 32 generally accepted engineering or other professional standards and applicable regulations. -

Download Non-Standard Schemas from the URL of the Description of Those Non-Standard Devices, Or Else Use Standard Schemas; 4
future internet Article Improvements of the xAAL Home Automation System Christophe Lohr * and Jérôme Kerdreux IMT Atlantique, Lab-STICC, UMR CNRS 6285, F-29238 Brest, France; [email protected] * Correspondence: [email protected]; Tel.: +33-(0)2-29-00-14-05 Received: 30 April 2020; Accepted: 10 June 2020; Published: 12 June 2020 Abstract: The xAAL home automation system has been designed on the basis of distributed systems principles with messages passing and home network communications over IP. The proposal makes extensive use of standards and provides a clear separation of roles along the distributed system with no predominant actor. This allows openness and interoperability. This objective can be reached once all parts are convinced: consumers, manufacturers, service providers, etc. To get a broad adoption, the proposal comes with fine-tuned communication, architecture, security, and simplicity. Tests and experiments in the long term have led us to optimize the protocol, adjust the architecture, and rearrange device descriptions. This paper provides a full description of the improved system, with all details to make feasible compatible alternative implementations. It also discusses alternatives and all aspects that led us to make structuring choices: CBOR messages on an IP multicast channel, intranet communication, ciphering with Poly1305/Chacha20, structured and extensible abstract device description, and a distributed system architecture. Keywords: home automation; internet of things; interoperability; comfort and wellbeing; ambient assisted living 1. Introduction Ambient Assisted Living (AAL) technologies aim to use digital products and services to ensure that dependents and seniors at home stay safe, healthy, active and independent. It includes smart devices, communication networks and software applications. -

Xenus XPL Datasheet
PLUS Xenus CANopen XPL RoHS Control Modes DIGITAL SERVO DRIVE • Profile Position-Velocity-Torque, Interpolated Position, Homing FOR BRUSH/BRUSHLESS MOTORS • Camming, Gearing • Indexer Command Interface R • CANopen • ASCII and discrete I/O • Stepper commands • ±10V position/velocity/torque (2 inputs) • PWM velocity/torque command • Master encoder (Gearing/Camming) Communications • CANopen DS-402 • RS-232 Feedback Incremental Incremental Encoders • Digital quad A/B Analog Sin/Cos Panasonic Incremental A Format • Aux. quad A/B encoder / encoder out Absolute Encoders • SSI, EnDat, Absolute A, Tamagawa & Panasonic Absolute A Sanyo Denki Absolute A, BiSS (B & C) Resolver (-R option) • Brushless Resolver Other • Digital Halls Accessories • External regen resistors • External edge filter Motor Torque Off (MTO) • Two active inputs enable power stage • One output confirms power stage status I/O Digital • 15 inputs, 6 outputs Model Vac Ic Ip I/O Analog XPL-230-18 100 - 240 6 18 • 2, 16-bit inputs • 1, 12-bit input XPL-230-36 100 - 240 12 36 • 1, 12-bit output XPL-230-40 100 - 240 20 40 Dimensions: in [mm] Add -R for resolver feedback option • 7.92 x 5.51 x 2.31 in (201.2 x 139.9 x 58.7 mm) DESCRIPTION Xenus Plus set new levels of performance, connectivity, and flexibility. CANopen communication provides a widely used cost-effective industrial bus. A wide range of absolute interfaces are built-in including EnDat, Hiperface, and BiSS. High resolution A/D converters ensure optimal current loop performance. Both isolated and high- speed non-isolated I/O are provided. For safety critical applications, redundant power stage enable inputs can be employed. -
Nomos Documentation Release 1.1.73
nomos Documentation Release 1.1.73 October 03, 2016 Contents 1 Introduction 2 2 Basic Configuration, Licensing and Control4 2.1 Basic Configuration......................................5 2.2 Licensing............................................ 16 2.3 Controlling the nomos - Service................................ 21 2.4 Scripting Client Tool...................................... 30 3 The nomos Command Set 53 3.1 Terminology / Types...................................... 53 3.2 Syntax (Structure of the Protocol)............................... 55 3.3 Answering Sequence...................................... 57 3.4 Formatting Options, Parsing Options, Status Port....................... 58 3.5 Command Classes....................................... 69 3.6 Standard Command Set.................................... 70 3.7 Dynamic Classes........................................ 103 3.8 Keyboard Layout (special keys)................................ 111 4 Expanded Functions (AddOn’s) 112 4.1 CommandServer Extension.................................. 114 4.2 GIRA Homserver KO-Gateway, KNXnet/IP Support..................... 132 4.3 Event Server.......................................... 147 4.4 Airport Support (Airfoil).................................... 152 4.5 eyeTV - Streaming Support.................................. 153 4.6 Apple Remote Support..................................... 155 4.7 Sonos Streaming Player Support................................ 163 4.8 Z-Wave Support........................................ 167 4.9 Philips HUE Support.....................................