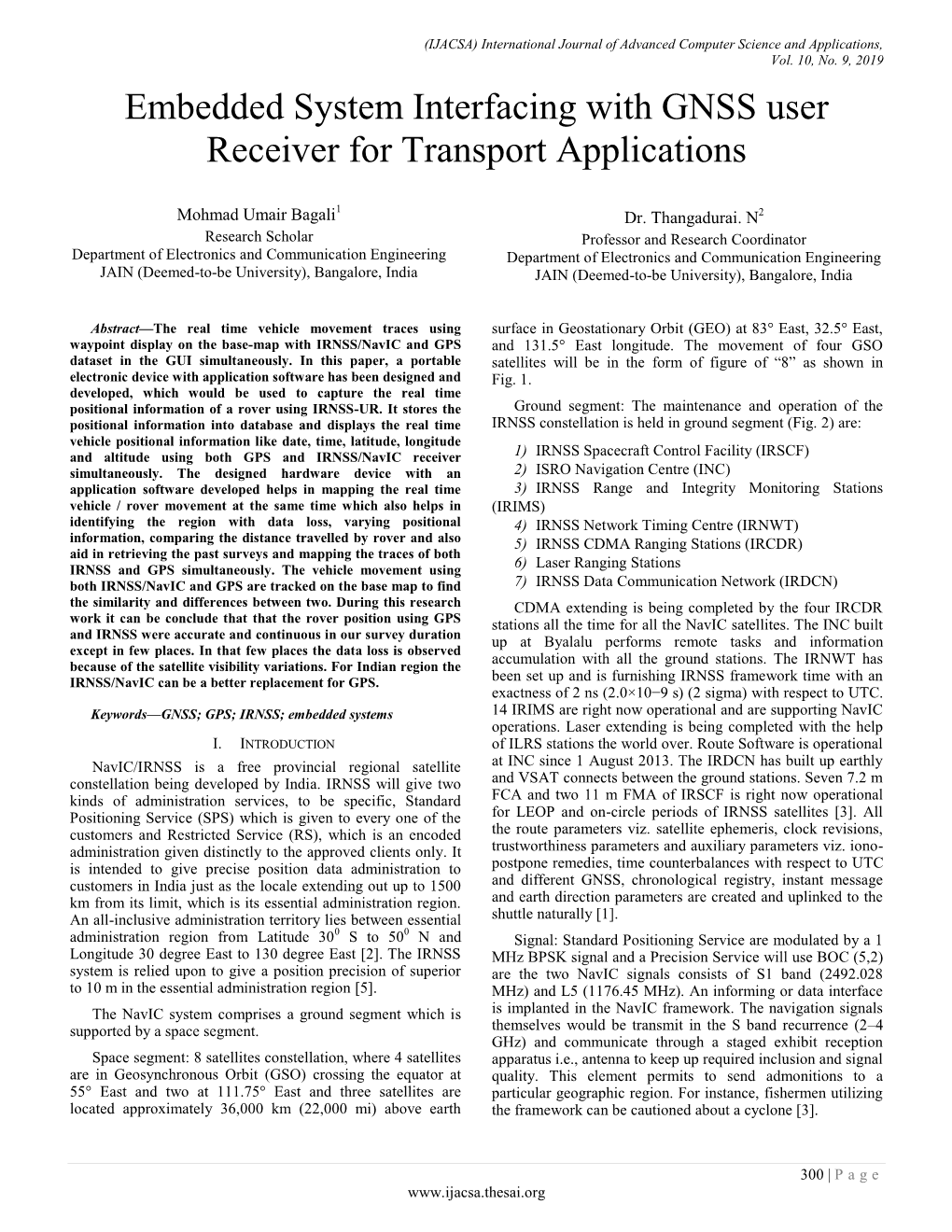
Embedded System Interfacing with GNSS User Receiver for Transport Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Volume 20, Issue 1, January 2017
CSSTEAP Newsletter JANUARY, 2017 l VOLUME 20 l ISSUE 1 Centre for Space Science & Technology Education in Asia & the Pacific (CSSTEAP) (Affiliated to the United Nations) on a mission of capacity building, the initiative of the United nations, for Asia and the Pacific Region in Space Science and Technologym through Excellence in Education, Training and Research. CSSTEAP Governing Board Chairman Shri A.S. Kiran Kumar India Members Mr. Hari Odari Nepal Dr. Hong Yong IL DPR Korea H.E. (Mrs.) Ma. Teresita C. Daza Philippines Dr. Thomas Djamaluddin Indonesia Mr. Ok-Kyu Lee Republic of Korea Mr. Ali Sadeghi Naeini Iran Mr. S. Panawennage Sri Lanka H.E. Mr. Bulat Sergazievich Sarsenbayev Executive Director, GISTDA Kazakhstan Thailand Prof. Abdykalykov A. Abdykalykovich Dr. Kamol M. Muminov Kyrgyzstan Uzbekistan H.E. Ybhg Datuk Naimun Ashakli Mohammad Observers Malaysia Dr. (Ms.) Simonetta Di Pippo UN-OOSA, Austria Dr. Batbold Enkhtuvshin Mongolia Prof. Dr. Ir. A. (Tom) Veldkamp ITC (The Netherlands) Dr. Kyi Thwin Myanmar Secretary Dr. A Senthil Kumar Mr. Kartar Singh Bhalla Director CSSTEAP Nauru Participants of 21st CSSTEAP Governing Board In this issue.. P08 P43 20th Post Graduate Course on Remote Performance Report of CSSTEAP Sensing & Geographic Information System P44 P10 Recent launches 21st Post Graduate Course on Remote Sensing & Geographic Information System (RS&GIS) P45 Indian Regional Navigation P12 Satellite System (IRNSS) 10th Post Graduate Diploma Course in Satellite Communications (SATCOM-10) and First Post Graduate Diploma Course -

Government of Karnataka RURAL O/O Commissioner for Public Instruction
Government of Karnataka RURAL O/o Commissioner for Public Instruction, Nrupatunga Road, Bangalore - 560001 Habitation wise Neighbourhood Schools - 2016 Habitation Name School Code Management type Lowest Highest class Entry class class Habitation code / Ward code School Name Medium Sl.No. District : Ramnagara Block : CHANNAPATNA Habitation : KADARAMANGALA 29320700101 29320700101 Govt. 1 7 Class 1 KADARAMANGALA G HPS KADARAMANGALA 05 - Kannada 1 Habitation : MAKALI PLANTATION 29320700201 29320700202 Govt. 1 5 Class 1 MAKALI PLANTATION G LPS ILLIGARADODDI 05 - Kannada 2 Habitation : MAKALI 29320700301 29320700301 Govt. 1 7 Class 1 MAKALI G HPS MAKALI 05 - Kannada 3 29320700301 29320700303 Govt. 1 5 Class 1 MAKALI G LPS PLANTATION DODDI 05 - Kannada 4 Habitation : MAKALI HOSAHALLI 29320700302 29320700302 Govt. 1 7 Class 1 MAKALI HOSAHALLI GHPS MAKALI HOSAHALLI 05 - Kannada 5 Habitation : RAMANARASIMRAJAPURA 29320700303 29320700304 Govt. 1 7 Class 1 RAMANARASIMRAJAPURA G HPS RAMANARASIMHARAJAPURA 05 - Kannada 6 Habitation : NAYEE DOLLE 29320700401 29320700401 Govt. 1 5 Class 1 NAYEE DOLLE G LPS NAYEEDOLLE 05 - Kannada 7 Habitation : DASHAVARA 29320700501 29320700501 Govt. 1 7 Class 1 DASHAVARA G HPS DASHAVARA 05 - Kannada 8 Habitation : PATELARADODDI 29320700502 29320700502 Govt. 1 5 Class 1 PATELARADODDI G LPS PATELARADODDI 05 - Kannada 9 Habitation : KELAGERE 29320700601 29320700602 Govt. 1 7 Class 1 KELAGERE GHPS KELAGERE 05 - Kannada 10 Habitation : HAROHALLIDODDI 29320700701 29320700701 Govt. 1 5 Class 1 HAROHALLIDODDI G LPS HAROHALLIDODDI 05 - Kannada 11 Habitation : BHYRANAYAKANAHALLI 29320700801 29320700801 Govt. 1 5 Class 1 BHYRANAYAKANAHALLI G LPS BHYRANAYAKANAHALLI 05 - Kannada 12 Habitation : GOWDAGERE 29320701001 29320701001 Govt. 1 7 Class 1 GOWDAGERE G HPS GOWDAGERE 05 - Kannada 13 Habitation : MAGNURU 29320701002 29320701002 Govt. -

1991 Census for the Bl:Ndil of Data Users
CENSUS OF INDIA 1991 Serie~ - II KARNATAKA DISTRICT CENSUS HANDBOOK RANGALORE RURAL DISTRICT PART XIJ-A VILLA(~i': ANI) TOWN lllRECTOkY SOBHA NAMBISAN Oirt'ctor 0" Cel1l'1ult OI)eralioJ1~. Karnauaka CONTENTS Page No. FOREWORD v-vi PREFACE vii-viii IMPORTANT STATISTICS ix-xii ANAL¥TICAL NOTE xv-xlv , Section-' - Village Directory - Explanatory Note 1-9 AlphabeLical List of Villages - ChannapaLna C.D.Block 13-16 Village Directory Statement - Channapalna C.D.Block 18-41 Alphabelical Li~1 of Villages - Dcvanhalli C.D.Block 45-50 Village Directory Statement - Dcvanhalli C.D.Block 52-89 Alphabetical List of Villages - Dod Ballapur C.D.Block 93-100 Village Directory Statement • Dod Ballapur C.D.Block 102-145 Alphabetical List of Villages. • Hoskotc C.D.Block 149-156 Village Directory Slatement • Hoskotc C.O.Block 158-203 Alphabetical List of Villages • Kanakapura C.D.Block 207-213 Village Directory Statement • Kanakapura C.D.Block 214-271 AlphabeLical List of Villages - Magadi C.O.1~lock 275-281 Village Directory Stalement • Magadi CO.Block 282·339 Alphabetical Li!!.t of Villages • Nclamangala C.O.Block 343-348 Village Directory Statement • Nclamangala C.D.Block 350-387 Alphabetical LiM of Villages • Ramanagaram C.O.Block 391-394 Village Directory Statement • Ramanagaram C.O.Blovk 396·421 (iii) Page No. Appendix I·IV I Community Development Blockwisc Abstract for Educational, Medical and Other Amenities 424-429 II Land Utilisation Data in respect of Non-Municipal Census Towns 428-429 III List of Villages where no amenities except Drinking Water -

Gram Panchayat Human Development
Gram Panchayat Human Development Index Ranking in the State - Districtwise Rank Rank Rank Standard Rank in in Health in Education in District Taluk Gram Panchayat of Living HDI the the Index the Index the Index State State State State Bagalkot Badami Kotikal 0.1537 2186 0.7905 5744 0.7164 1148 0.4432 2829 Bagalkot Badami Jalihal 0.1381 2807 1.0000 1 0.6287 4042 0.4428 2844 Bagalkot Badami Cholachagud 0.1216 3539 1.0000 1 0.6636 2995 0.4322 3211 Bagalkot Badami Nandikeshwar 0.1186 3666 0.9255 4748 0.7163 1149 0.4284 3319 Bagalkot Badami Hangaragi 0.1036 4270 1.0000 1 0.7058 1500 0.4182 3659 Bagalkot Badami Mangalore 0.1057 4181 1.0000 1 0.6851 2265 0.4169 3700 Bagalkot Badami Hebbali 0.1031 4284 1.0000 1 0.6985 1757 0.4160 3727 Bagalkot Badami Sulikeri 0.1049 4208 1.0000 1 0.6835 2319 0.4155 3740 Bagalkot Badami Belur 0.1335 3011 0.8722 5365 0.5940 4742 0.4105 3875 Bagalkot Badami Kittali 0.0967 4541 1.0000 1 0.6652 2938 0.4007 4141 Bagalkot Badami Kataraki 0.1054 4194 1.0000 1 0.6054 4549 0.3996 4163 Bagalkot Badami Khanapur S.K. 0.1120 3946 0.9255 4748 0.6112 4436 0.3986 4187 Bagalkot Badami Kaknur 0.1156 3787 0.8359 5608 0.6550 3309 0.3985 4191 Bagalkot Badami Neelgund 0.0936 4682 1.0000 1 0.6740 2644 0.3981 4196 Bagalkot Badami Parvati 0.1151 3813 1.0000 1 0.5368 5375 0.3953 4269 Bagalkot Badami Narasapura 0.0902 4801 1.0000 1 0.6836 2313 0.3950 4276 Bagalkot Badami Fakirbhudihal 0.0922 4725 1.0000 1 0.6673 2874 0.3948 4281 Bagalkot Badami Kainakatti 0.1024 4312 0.9758 2796 0.6097 4464 0.3935 4315 Bagalkot Badami Haldur 0.0911 4762 -

Moon Vehicle
artist's article oon M he Moon Vehicle: Reflections T ng I n I from an Artist-Led Children’s g ima Workshop on the Chandrayaan-1 re Spacecraft’s Mission to the Moon a b s t r a c t This article reflects on the journey to the Moon of the spacecraft Chandrayaan-1 as it was interpreted through an Joanna Griffin artist-led workshop. The work- shop participants were a group of children who lived close to where Chandrayaan was built and some of the engineers and scientists responsible for creating the spacecraft. Insights from the workshop show how a mission to the Moon draws The 2-week children’s workshop that is the fo- asked to come back when ISRO on both the technological and cus of this article was held at Drishya Learning Centre, located needed its spacesuits designed! This the imaginative; they also have in one of the urban slums of Bangalore, India. The workshop rejection, of course, only added ur- bearing on the relative agency was one of many events in a long-term project called Moon gency to the cultural mission. It also of these individuals to contribute to the Moon missions in ways Vehicle, begun in March 2008, which was based out of the Cen- indicated that the operating space that are personally meaningful tre for Experimental Media Arts (CEMA) at the Srishti School for the Moon Vehicle project would to them. of Art, Design and Technology in Bangalore. Srishti is one of be at the fringes of ISRO and would the foremost design institutions in India and has a commit- take shape via unofficial, informal ment to pioneering art/science projects. -

Ramanagara District
Details of Respective area engineers of BESCOM (Row 2 - District name) (Column 10 - Alphabetical order of Areas) District: Ramanagar Sl Zone Circle Division Sub Division O&M Unit Areas No 1 2 3 4 5 6 7 8 9 10 11 12 Assistant Assistant Superintending Executive Engineer / Name Chief Engineer Name Name Name Executive Name Engineer Engineer Junior Engineer Engineer BRAZ Sri. Siddaraju ramanagara "Sri. Nagarajan chandapura "(EE) 9448234567 94498 41655 Thimmegowda 080-23500117 080-28488780 9448279027 (eechandapura [email protected] [email protected] [email protected] n .in" .in) muniswamy layout Kammasandra ( F-14 Feeder, Electronic city MUSS) bommasandra industrial are 3rd phase bommasandra industrial area 3rd stage near Smt. Jamuna acharya ITI collage padmapriya industrial estate --NPS fa bommasandra village, Concord Wind Rass Appt Ramsagar village heelalige Heelalige Main Road Near "(AEE) 9449865127 BCET Engineering College Chandapura RK Lake Viw, Thimmareddy industrial area old chandapura Vidyanagar, Heelalige grama royal gardenia RS Gardenium Shashidhar M.K aochandapura@gma decathlon Varthur main road Ananthnagar Phase-1 SFS Enclave, Dady's Garden, Golden nest rk city 4th lane neraluru..Dady's Garden, Golden nest ( HT ) VEERA 8277892574 il.com AE Suresh munireddy industrial area, near A2B hotel MR Layout (old chandapura) Banglapete , fortune city noorani masjid Tranquil city Opposite Hebbagodi police SANDRA 8310502355 ANANTHA 1 9449872371, station Infosys colony reliable levendulla house huskur gate hellalige gate royal mist apartment -

District Census Handbook, Bangalore, Part XII-B, Series-11
CENSUS OF IN,DIA 1991 Series· 11 KARNATAKA DISTRICT CENSUS HANDBOOK ~ . - - - - BANGALORE DISTRICT PART XII· R VILLAGE AND TOWN WISE PRIMARY CENSUS ABSTRACT SORHA NAMBISAN Director or Census Operntlons, Karnatuka CONTENTS Page No. FOREWORD v-vi PREFACE vii-viii IMPORTANT STATISTICS lX-Xli ANALYTICAL NOTE xv-liii PRIMARY CENSUS ABSTRACT Explanatory Notes 1-4 A. District Primary Census Abstract 6-72 (i) Villagcrrown Primary Census Abstract Alphabetical List of Villages - Andal CD.Block 75-80 Primary Census Abstract - Anekal CD.Bloek 82-109 Alphabetical List of Villages - Bangalore North CD.Block 113-118 Primary Census Abstract - Bangalorc North CD.Block 120-159 Alphabetica( List of Villages - Bangalore South CD.Block 163-169 Primary Census Abstract - Bangalon.: SmIth CD.Block 170-209 (ii) Town Primary Census Abstractn (Wan.lwise) Alphabetical List of Towns in the District 212-213 Anekal (TMC) 214-217 Dommasandra (NMCT) 214-217 Katigodi (NMCTT 214-217 Bangalore U A 214-261 B. District Primary Censu::. Abstract for Scheduled Castes 264-323 C. District. Primary Census Abstract for Scheduled Tribes 326-385 Appendix-I - District Primary Census Abstract Talukwise 388-429 Appendix-II - List of Schedukd Castes and Scheduled Tribes 431-432 Appl.:ndix-llI - Publication Plan 433-435 ILLUSTRATIONS Map of Karnataka showing the Administrative Divisons (xiii) Map of Bangalore District (xiv) (iii) FOREWORD Publication of the District Census Handbooks (DCHs) was initiated after the 1951 Census and is continuing since then with some innovations/ modifications after each decennial Census. This is the most valuable distriCsJevcl publication brought out by the Census Organisation on behalf of each State Govt./Union Territory administration. -
Annual Report 2020-2021
´ÉÉ̹ÉEò Ê®{ÉÉä]Ç ANNUAL REPORT 2020-2021 ´ÉÉ̹ÉEò Ê®{ÉÉä]Ç ANNUAL REPORT 2020-2021 Citizens’ Charter of Department of Space Department Of Space (DOS) has the primary responsibility of promoting the development of space science, technology and applications towards achieving self-reliance and facilitating in all round development of the nation. With this basic objective, DOS has evolved the following programmes: • Indian National Satellite (INSAT) programme for telecommunication, television broadcasting, meteorology, developmental education, societal applications such as telemedicine, tele-education, tele-advisories and similar such services • Indian Remote Sensing (IRS) satellite programme for the management of natural resources and ´ÉÉ̹ÉEò Ê®{ÉÉä]Ç 2020-2021 ¦ÉÉ®úiÉ ºÉ®úEòÉ®, +ÆiÉÊ®úIÉ Ê´É¦ÉÉMÉ ¦ÉÉ®úiÉ ºÉ®úEòÉ®, +ÆiÉÊ®úIÉ Ê´É¦ÉÉMÉ various developmental projects across the country using space based imagery • Indigenous capability for the design and development of satellite and associated technologies for communications, navigation, remote sensing and space sciences • Design and development of launch vehicles for access to space and orbiting INSAT/ GSAT, IRS and IRNSS satellites and space science missions • Research and development in space sciences and technologies as well as application programmes for national development The Department Of Space is committed to: • Carrying out research and development in satellite and launch vehicle technology with a goal to achieve total self reliance • Provide national space infrastructure for telecommunications -

Organisation, Functions and Duties A
ORGANISATION, FUNCTIONS AND DUTIES A. Organisation With the setting up of Indian National Committee for Space Research (INCOSPAR) in 1962, the space activities in the country were initiated. In the same year, the work on Thumba Equatorial Rocket Launching Station (TERLS) near Thiruvananthapuram was also started. Indian Space Research Organisation (ISRO) was established in August 1969. The Government of India constituted the Space Commission and established the Department of Space (DOS) in June 1972 and brought ISRO under DOS in September 1972. The Space Commission formulates the policies and oversees the implementation of the Indian space programme to promote the development and application of space science and technology for the socio-economic benefit of the country. DOS implements these programmes through, mainly, Indian Space Research Organisation (ISRO) and the Grant- in-Aid institutions viz. Physical Research Laboratory (PRL), National Atmospheric Research Laboratory (NARL), North Eastern-Space Applications Centre (NE-SAC), Semi- Conductor Laboratory (SCL) and Indian Institute of Space Science and Technology (IIST). The Antrix Corporation, established in 1992 as a government owned company, markets the space products and services. The establishment of space systems and their applications are coordinated by the national level committees, namely, INSAT Coordination Committee (ICC), Planning Committee on National Natural Resources Management System (PC-NNRMS) and Advisory Committee of on Space Sciences (ADCOS). The Secretariat of DOS and ISRO Headquarters are located at Antariksh Bhavan in Bangalore. Programme offices at ISRO Headquarters coordinate the programmes like satellite communication, earth observation, launch vehicle, space science, disaster management support, sponsored research scheme, contracts management, international cooperation, safety, reliability, publications and public relations, budget & economic analysis, civil engineering and human resources development. -

Jurisdiction of Income Tax Officers, Bengaluru with Telephone Directory
JURISDICTION OF INCOME TAX OFFICERS, BENGALURU WITH TELEPHONE DIRECTORY CONTENT PAGE NO. SPAN OF CONTROL 1-5 PINCODE JURISDICTION 6-8 RANGE 1 (1) TO RANGE 7 (2) RANGE 1, 1(1), 1(2), 1(3) 9-14 RANGE 2, 2(1), 2(2), 2(3) 15-19 RANGE 3, 3(1), 3(2), 3(3) 20-26 RANGE 4, 4(1), 4(2), 4(3) 27-33 RANGE 5, 5(1), 5(2), 5(3) 34-38 RANGE 6, 6(1), 6(2), 6(3) 39-45 RANGE 7, 7(1), 7(2) 46-49 TRANSFER PRICING 50-52 INTERNATIONAL TAXATION 53-54 AUDIT 55-56 TDS 57-59 DGIT - CENTRAL CIRCLE - I & II 60-61 INVESTIGATION - UNIT I, II, III 62 CIB (INTELLIGIENCE) 63 EXEMPTIONS 64 SPAN OF CONTROL Pr. CCIT, Bengaluru CCIT, Bengaluru - 1 CCIT, Bengaluru - 2 Pr. CIT, Bengaluru - 1 Pr. CIT, Bengaluru - 2 Pr. CIT, Bengaluru - 5 Range - 1(1), Bengaluru Range - 2(1), Bengaluru Range - 5(1), Bengaluru Range - 1(2), Bengaluru Range - 2(2), Bengaluru Range - 5(2), Bengaluru Range - 1(3), Bengaluru Range - 2(3), Bengaluru Range - 5(3), Bengaluru CIT (ADMN & CO), Bengaluru Pr. CIT, Bengaluru - 3 Pr. CIT, Bengaluru - 6 CIT (DR), ITAT, Bengaluru - 1 Range - 3(1), Bengaluru Range - 6(1), Bengaluru CIT (DR), ITAT, Bengaluru - 2 Range - 3(2), Bengaluru Range - 6(2), Bengaluru CIT (DR), ITAT, Bengaluru - 3 Range - 3(3), Bengaluru Range - 6(3), Bengaluru CIT (Judicial), Bengaluru Pr. CIT, Bengaluru - 4 Pr. CIT, Bengaluru - 7 Range - 4(1), Bengaluru Range - 7(1), Bengaluru CIT (Audit), Bengaluru Range - 4(2), Bengaluru Range - 7(2), Bengaluru Range - 4(3), Bengaluru CIT (A)-1, Bengaluru Pr. -

Government of Karnataka Revenue Village, Habitation Wise
Government of Karnataka O/o Commissioner for Public Instruction, Nrupatunga Road, Bangalore - 560001 RURAL Revenue village, Habitation wise Neighbourhood Schools - 2015 Habitation Name School Code Management Lowest Highest Entry type class class class Habitation code / Ward code School Name Medium Sl.No. District : Mysore Block : H.D.KOTE Revenue Village : 29260300805 Govt. 6 10 GOVT ADARSHAVIDYALAYA H D KOTE 19 - English 1 Revenue Village : HEGGANOOR COLONY 29260300101 29260300101 Govt. 1 8 Class 1 H COLONY GHPS, HEGGANOOR COLONY 05 - Kannada 2 Revenue Village : HEGGANUR 29260300201 29260300201 Govt. 1 5 Class 1 HEGGANURU GLPS, HEGGANUR, HEGGANUR 05 - Kannada 3 Revenue Village : KATAVALU 29260300301 29260300301 Govt. 1 8 Class 1 KATVALU GHPS, KATAVALU, KATAVALU 05 - Kannada 4 29260300301 29260300303 Govt. 1 5 Class 1 KATVALU GLPS THELAGU MASAHALLI 05 - Kannada 5 29260300302 29260300302 Govt. 1 5 Class 1 COLONY GLPS KATVALU COLONY 05 - Kannada 6 29260300303 29260300304 Govt. 1 5 Class 1 M KATTE GLPS MATADA KATTE 05 - Kannada 7 Revenue Village : DEVALAPURA 29260300501 29260300502 Govt. 1 7 Class 1 PURA GHPS, DEVALAPURA 05 - Kannada 8 29260300501 29260300501 Govt. 1 5 Class 1 PURA GLPS, DEVALAPURA 05 - Kannada 9 29260300501 29260300503 Govt. 1 7 Class 1 PURA GHPS DEVALAPURA COLONY 05 - Kannada 10 Revenue Village : HULLEMALA 29260300601 29260300601 Govt. 1 5 Class 1 HULLE MALA GLPS, HULLEMALA 05 - Kannada 11 Revenue Village : BEECHANAHALLI 29260300801 29260300801 Govt. 1 7 Class 1 BEECHNALLI GHPS, BEECHANAHALLI 05 - Kannada 12 Revenue Village : MAGUDILU 29260301001 29260301001 Govt. 1 7 Class 1 e-Governance, CPI office, Bangalore 1/3/2015 -3:51:26 PM 1 Government of Karnataka O/o Commissioner for Public Instruction, Nrupatunga Road, Bangalore - 560001 RURAL Revenue village, Habitation wise Neighbourhood Schools - 2015 Habitation Name School Code Management Lowest Highest Entry type class class class Habitation code / Ward code School Name Medium Sl.No. -
District Census Handbook, Bangalore, Part XII-A, Series-11
CENSUS OF INDIA 1991 Series - II KARNATAKA DISTRICT CENSUS HANDBOOK BANGALORE DISTRJCT PART XII- A VILLAGE ANI) TOWN DIRECTORY SOBIIA NAI\1IUSAN ()in~ct()r (If Census Opcrutions, Karnataka CONTENTS Page No. FORE\VORD V-\'I VII-VIII I;\IP()RTA~T ST ATISTlCS IX-XII Ai"Al.YTlCAL i"OTE xv-Iii S~ctiIJJl-1 - \illag~ ()ir~dllr) Explanatory i"ote I-I) Alphahdical Li:-.t of VilLlges 1.\-1)-\ Village Direl'lm), Statement 20-57 Alphabl'l ical List of Villages [bng~tI\lre l"llnh C.D.[jlllCk Village Directory Statemenl B:ll1galllrl: l"urth CO.l3luck Alphahetical Li:-.t of Vilbges - Bang;111lf1: SoUL h CD. Block lOS-lJol Village OireclllfY SI:lll'll1enl - Bangalon: Smll h CD. Block 11~-IS7 App~ndix I-IV Community Devel()pment Blockwise Ah~lr;lCt fur Educaliul1al, ;\lcdical and Other Amenilies II Land Utilisation Data in fL:sPL:Cl of Non-;\lunicipal Census Towns III Lisl of Villages wherL: no al11eni(ie~ excepl Drinking Waler ;tre availahle IV-A List of Vilbgl..'s acc(lrding to the proportion of Scheduled Clsks 10 Tolal Popublion hy Ibnges 1()7-171 IV -5 Lisl of Villages according 1\1 t hl' Jllllp,lll illn of SdledukJ Trihl's to Tlltal Plljlubtilln by Ranges 172-17-1- rag~ No, Section·1I • Town Dil'l'l,t4ll'Y Explanatory N,lll: 177-1~7 Slatcmcnl - Slalll!o. and (iwwlh lIi"lllry )1)0-11)3 Slat.:nh:nt II - Phy~ic:tl t\:--pl:l'b, and Lm:aliull of T()\\n~, 1')~') )1).:l-11J7 Statement III - lVlunicip;11 Finann:, I')K') lWi-201 Slatl'llll:nl IV - Ci\'il' and Olhl'r Anu:niliL's, II)XI) 202-2115 Statement IV-A - Ci\'il' and Olhl'r Aml'lIjli~'s ill Nlllilied Slullls.