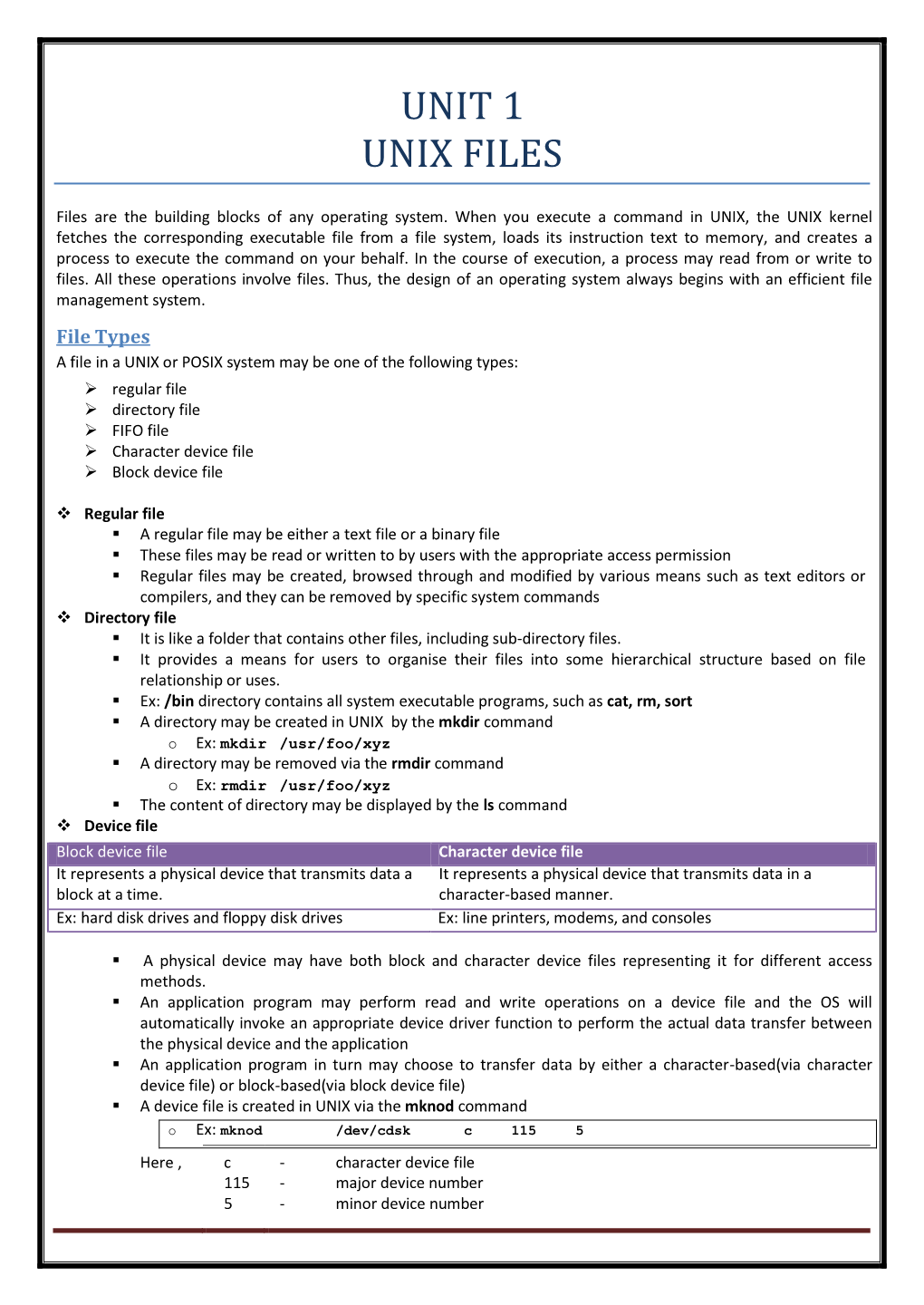
Unit 1 Unix Files
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cygwin User's Guide
Cygwin User’s Guide Cygwin User’s Guide ii Copyright © Cygwin authors Permission is granted to make and distribute verbatim copies of this documentation provided the copyright notice and this per- mission notice are preserved on all copies. Permission is granted to copy and distribute modified versions of this documentation under the conditions for verbatim copying, provided that the entire resulting derived work is distributed under the terms of a permission notice identical to this one. Permission is granted to copy and distribute translations of this documentation into another language, under the above conditions for modified versions, except that this permission notice may be stated in a translation approved by the Free Software Foundation. Cygwin User’s Guide iii Contents 1 Cygwin Overview 1 1.1 What is it? . .1 1.2 Quick Start Guide for those more experienced with Windows . .1 1.3 Quick Start Guide for those more experienced with UNIX . .1 1.4 Are the Cygwin tools free software? . .2 1.5 A brief history of the Cygwin project . .2 1.6 Highlights of Cygwin Functionality . .3 1.6.1 Introduction . .3 1.6.2 Permissions and Security . .3 1.6.3 File Access . .3 1.6.4 Text Mode vs. Binary Mode . .4 1.6.5 ANSI C Library . .4 1.6.6 Process Creation . .5 1.6.6.1 Problems with process creation . .5 1.6.7 Signals . .6 1.6.8 Sockets . .6 1.6.9 Select . .7 1.7 What’s new and what changed in Cygwin . .7 1.7.1 What’s new and what changed in 3.2 . -

11.7 the Windows 2000 File System
830 CASE STUDY 2: WINDOWS 2000 CHAP. 11 11.7 THE WINDOWS 2000 FILE SYSTEM Windows 2000 supports several file systems, the most important of which are FAT-16, FAT-32, and NTFS (NT File System). FAT-16 is the old MS-DOS file system. It uses 16-bit disk addresses, which limits it to disk partitions no larger than 2 GB. FAT-32 uses 32-bit disk addresses and supports disk partitions up to 2 TB. NTFS is a new file system developed specifically for Windows NT and car- ried over to Windows 2000. It uses 64-bit disk addresses and can (theoretically) support disk partitions up to 264 bytes, although other considerations limit it to smaller sizes. Windows 2000 also supports read-only file systems for CD-ROMs and DVDs. It is possible (even common) to have the same running system have access to multiple file system types available at the same time. In this chapter we will treat the NTFS file system because it is a modern file system unencumbered by the need to be fully compatible with the MS-DOS file system, which was based on the CP/M file system designed for 8-inch floppy disks more than 20 years ago. Times have changed and 8-inch floppy disks are not quite state of the art any more. Neither are their file systems. Also, NTFS differs both in user interface and implementation in a number of ways from the UNIX file system, which makes it a good second example to study. NTFS is a large and complex system and space limitations prevent us from covering all of its features, but the material presented below should give a reasonable impression of it. -

Package 'Filelock'
Package ‘filelock’ October 5, 2018 Title Portable File Locking Version 1.0.2 Author Gábor Csárdi Maintainer Gábor Csárdi <[email protected]> Description Place an exclusive or shared lock on a file. It uses 'LockFile' on Windows and 'fcntl' locks on Unix-like systems. License MIT + file LICENSE LazyData true URL https://github.com/r-lib/filelock#readme BugReports https://github.com/r-lib/filelock/issues RoxygenNote 6.0.1.9000 Suggests callr (>= 2.0.0), covr, testthat Encoding UTF-8 NeedsCompilation yes Repository CRAN Date/Publication 2018-10-05 10:30:12 UTC R topics documented: lock .............................................2 Index 5 1 2 lock lock Advisory File Locking and Unlocking Description There are two kinds of locks, exclusive and shared, see the exclusive argument and other details below. Usage lock(path, exclusive = TRUE, timeout = Inf) unlock(lock) Arguments path Path to the file to lock. If the file does not exist, it will be created, but the directory of the file must exist. Do not place the lock on a file that you want to read from or write to! *Always use a special lock file. See details below. exclusive Whether to acquire an exclusive lock. An exclusive lock gives the process ex- clusive access to the file, no other processes can place any kind of lock on it. A non-exclusive lock is a shared lock. Multiple processes can hold a shared lock on the same file. A process that writes to a file typically requests an exclusive lock, and a process that reads from it typically requests a shared lock. -

Secure Untrusted Data Repository (SUNDR)
Secure Untrusted Data Repository (SUNDR) Jinyuan Li, Maxwell Krohn,∗ David Mazieres,` and Dennis Shasha NYU Department of Computer Science Abstract for over 20,000 different software packages. Many of these packages are bundled with various operating sys- SUNDR is a network file system designed to store data tem distributions, often without a meaningful audit. By securely on untrusted servers. SUNDR lets clients de- compromising sourceforge, an attacker can therefore in- tect any attempts at unauthorized file modification by troduce subtle vulnerabilities in software that may even- malicious server operators or users. SUNDR’s protocol tually run on thousands or even millions of machines. achieves a property called fork consistency, which guar- Such concerns are no mere academic exercise. For ex- antees that clients can detect any integrity or consistency ample, the Debian GNU/Linux development cluster was failures as long as they see each other’s file modifications. compromised in 2003 [2]. An unauthorized attacker used An implementation is described that performs compara- a sniffed password and a kernel vulnerability to gain su- bly with NFS (sometimes better and sometimes worse), peruser access to Debian’s primary CVS and Web servers. while offering significantly stronger security. After detecting the break-in, administrators were forced to freeze development for several days, as they employed manual and ad-hoc sanity checks to assess the extent of 1 Introduction the damage. Similar attacks have also succeeded against Apache [1], Gnome [32], and other popular projects. SUNDR is a network file system that addresses a long- Rather than hope for invulnerable servers, we have de- standing tension between data integrity and accessibility. -
Mac OS X for UNIX Users the Power of UNIX with the Simplicity of Macintosh
Mac OS X for UNIX Users The power of UNIX with the simplicity of Macintosh. Features Mac OS X version 10.3 “Panther” combines a robust and open UNIX-based foundation with the richness and usability of the Macintosh interface, bringing UNIX technology Open source, standards-based UNIX to the mass market. Apple has made open source and standards a key part of its foundation strategy and delivers an operating system built on a powerful UNIX-based foundation •Based on FreeBSD 5 and Mach 3.0 • Support for POSIX, Linux, and System V APIs that is innovative and easy to use. • High-performance math libraries, including There are over 8.5 million Mac OS X users, including scientists, animators, developers, vector/DSP and PowerPC G5 support and system administrators, making Mac OS X the most widely used UNIX-based desktop • Optimized X11 window server for UNIX GUIs operating system. In addition, Mac OS X is the only UNIX-based environment that •Open source code available via the natively runs Microsoft Office, Adobe Photoshop, and thousands of other consumer Darwin project applications—all side by side with traditional command-line, X11, and Java applications. Standards-based networking For notebook computer users, Mac OS X delivers full power management and mobility •Open source TCP/IP-based networking support for Apple’s award-winning PowerBook G4. architecture, including IPv4, IPv6, and L2TP/IPSec •Interoperability with NFS, AFP, and Windows (SMB/CIFS) file servers •Powerful web server (Apache) •Open Directory 2, an LDAP-based directory services -

Managing Network File Systems in Oracle® Solaris 11.4
Managing Network File Systems in ® Oracle Solaris 11.4 Part No: E61004 August 2021 Managing Network File Systems in Oracle Solaris 11.4 Part No: E61004 Copyright © 2002, 2021, Oracle and/or its affiliates. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, then the following notice is applicable: U.S. GOVERNMENT END USERS: Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs) and Oracle computer documentation or other Oracle data delivered to or accessed by U.S. Government end users are "commercial computer software" or "commercial computer software documentation" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, the use, reproduction, duplication, release, display, disclosure, modification, preparation of derivative works, and/or adaptation of i) Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs), ii) Oracle computer documentation and/or iii) other Oracle data, is subject to the rights and limitations specified in the license contained in the applicable contract. -

Portalocker Documentation Release 2.3.2
Portalocker Documentation Release 2.3.2 Rick van Hattem Aug 27, 2021 CONTENTS 1 portalocker - Cross-platform locking library1 1.1 Overview.................................................1 1.2 Redis Locks...............................................1 1.3 Python 2.................................................2 1.4 Tips....................................................2 1.5 Links...................................................2 1.6 Examples.................................................3 1.7 Versioning................................................4 1.8 Changelog................................................4 1.9 License..................................................4 1.9.1 portalocker package.......................................4 1.9.1.1 Submodules......................................4 1.9.1.2 Module contents....................................9 1.9.2 tests package.......................................... 13 1.9.2.1 Module contents.................................... 13 1.9.3 License............................................. 13 2 Indices and tables 15 Python Module Index 17 Index 19 i ii CHAPTER ONE PORTALOCKER - CROSS-PLATFORM LOCKING LIBRARY 1.1 Overview Portalocker is a library to provide an easy API to file locking. An important detail to note is that on Linux and Unix systems the locks are advisory by default. By specifying the -o mand option to the mount command it is possible to enable mandatory file locking on Linux. This is generally not recommended however. For more information about the subject: • https://en.wikipedia.org/wiki/File_locking -

Real-Time Audio Servers on BSD Unix Derivatives
Juha Erkkilä Real-Time Audio Servers on BSD Unix Derivatives Master's Thesis in Information Technology June 17, 2005 University of Jyväskylä Department of Mathematical Information Technology Jyväskylä Author: Juha Erkkilä Contact information: [email protected].fi Title: Real-Time Audio Servers on BSD Unix Derivatives Työn nimi: Reaaliaikaiset äänipalvelinsovellukset BSD Unix -johdannaisjärjestelmissä Project: Master's Thesis in Information Technology Page count: 146 Abstract: This paper covers real-time and interprocess communication features of 4.4BSD Unix derived operating systems, and especially their applicability for real- time audio servers. The research ground of bringing real-time properties to tradi- tional Unix operating systems (such as 4.4BSD) is covered. Included are some design ideas used in BSD-variants, such as using multithreaded kernels, and schedulers that can provide real-time guarantees to processes. Factors affecting the design of real- time audio servers are considered, especially the suitability of various interprocess communication facilities as mechanisms to pass audio data between applications. To test these mechanisms on a real operating system, an audio server and a client utilizing these techniques is written and tested on an OpenBSD operating system. The performance of the audio server and OpenBSD is analyzed, with attempts to identify some bottlenecks of real-time operation in the OpenBSD system. Suomenkielinen tiivistelmä: Tämä tutkielma kattaa reaaliaikaisuus- ja prosessien väliset kommunikaatio-ominaisuudet, keskittyen 4.4BSD Unix -johdannaisiin käyt- töjärjestelmiin, ja erityisesti siihen kuinka hyvin nämä soveltuvat reaaliaikaisille äänipalvelinsovelluksille. Tutkimusalueeseen sisältyy reaaliaikaisuusominaisuuk- sien tuominen perinteisiin Unix-käyttöjärjestelmiin (kuten 4.4BSD:hen). Mukana on suunnitteluideoita, joita on käytetty joissakin BSD-varianteissa, kuten säikeis- tetyt kernelit, ja skedulerit, jotka voivat tarjota reaaliaikaisuustakeita prosesseille. -

Apple File System Reference
Apple File System Reference Developer Contents About Apple File System 7 General-Purpose Types 9 paddr_t .................................................. 9 prange_t ................................................. 9 uuid_t ................................................... 9 Objects 10 obj_phys_t ................................................ 10 Supporting Data Types ........................................... 11 Object Identifier Constants ......................................... 12 Object Type Masks ............................................. 13 Object Types ................................................ 14 Object Type Flags .............................................. 20 EFI Jumpstart 22 Booting from an Apple File System Partition ................................. 22 nx_efi_jumpstart_t ........................................... 24 Partition UUIDs ............................................... 25 Container 26 Mounting an Apple File System Partition ................................... 26 nx_superblock_t ............................................. 27 Container Flags ............................................... 36 Optional Container Feature Flags ...................................... 37 Read-Only Compatible Container Feature Flags ............................... 38 Incompatible Container Feature Flags .................................... 38 Block and Container Sizes .......................................... 39 nx_counter_id_t ............................................. 39 checkpoint_mapping_t ........................................ -

Sharing Mac® Files on Windows® Servers a Technical Best Practices Whitepaper
WHITE PAPER The Best of Both Worlds: Sharing Mac® Files on Windows® Servers A Technical Best Practices Whitepaper About This Document Apple’s® Mac® OS X computer platform has seen its market share grow rapidly in Enterprise environments recently. This has been driven by the popularity of innovative products like the iPhone® and the MacBook Air, as well as Mac OS X’s security and its ability to run virtualized instances of Windows® applications. As a result, Macs are entering the Enterprise through senior level executives or formal corporate pilot projects. Laura DiDio from industry consultancy Information Technology Intelligence Corporation released a survey in late 2008 that showed 68% of some 700 companies polled planned to allow their end-users to deploy Macs as their work systems in the next 12 months. Separately, a recent survey by the Enterprise Desktop Alliance showed that 91% of IT administrators indicated that integration and management parity between Macs and PCs were major issues of importance to their organization. This whitepaper discusses the issues involved in sharing files between Macs and Windows servers and compares the options for successful integration. It is intended for systems administrators, technical evaluators and decision-makers who are considering upgrading or purchasing GroupLogic’s ExtremeZ-IP® solution for the first time. Overview While Apple’s Xserve provides a pure Mac file server solution, most organizations use Windows file servers. Additionally, the official Xserve end-of-life was declared by Apple in January 2011 and Apple no longer offers a server-grade, rack- mountable hardware solution. Existing investments in Windows technology and training, heavy usage, a high volume of users, virtualization and cluster environments often mean that changing a company’s IT strategy is neither economically nor politically feasible. -
Design and Implementation of XNU Port of Lustre Client File System
Design and Implementation of XNU port of Lustre Client File System Danilov Nikita 2005.02.01 Abstract Describes structure of Lustre client file system module for XNU (Darwin kernel). In particular, changes that were necessary in core XNU kernel to enable unique Lustre requirements (e.g., intents) are discussed in much detail. Changes to the platform-independent core of Lustre in order to make it more portable are discussed in the companion paper Lustre Universal Portability Specification. Contents 1 Introduction 2 2 Distribution 3 3 Backgroundon XNU 3 3.1 XNUVFS.......................................... ......... 3 3.1.1 namei()....................................... ......... 4 3.1.2 vnodelifecycle ................................ ........... 6 3.2 XNUpagecache.................................... ........... 6 3.3 XNUSynchronization .............................. ............. 7 3.4 Miscellania..................................... ............. 9 4 High Level Design 9 4.1 XLLIntentHandling ............................... ............. 9 4.1.1 Requirements .................................. .......... 9 4.1.2 FunctionalSpecification . .............. 10 4.1.3 UseCases ...................................... ........ 10 4.1.4 LogicalSpecification . ............. 11 4.1.5 StateSpecification ......................... .... ............ 12 4.2 Sessions........................................ ............ 12 4.2.1 Requirements .................................. .......... 12 4.2.2 FunctionalSpecification . .............. 12 4.2.3 UseCases ..................................... -

Lock Or No-Lock?
Lock Or No-Lock? Abstract guaranteeing atomicity are necessary when these oper- ations must be atomic. Many scientific applications require high perfor- With the advent of parallel I/O libraries data can be mance concurrent IO accesses to a file by multiple pro- accessed in various complex patterns. Locking mecha- cesses. Those applications rely indirectly on atomic IO nisms are used to ensure that shared data is not being capabilities inorder to perform updates to structured violated. Adapted from the POSIX semantics, parallel datasets, such as those stored in HDF5 format files. file system like GPFS [9] and Lustre [10] provide byte Current support for atomic mode operations such as range locking mechanism. Byte range locks provide these in MPI-IO is performed by locking around the an option for guaranteeing atomicity of non-contiguous operations, imposing lock overhead in all situations, operations. By locking the entire region, changes can even though in many cases these operations are non- be made using a read-modify-write sequence. How- overlapping in the file. We propose to isolate non- ever, this approach does not consider the actual non- overlapping accesses from overlapping ones in collec- contiguous access pattern that may occur in a byte tive I/O cases, allowing the non-overlapping ones to range and introduces false sharing. This approach also proceed without imposing lock overhead. To enable this limits the benefits of parallel I/O that can be gained, we have implemented an efficient conflict detection al- by unnecessarily serializing the accesses. To address gorithm in MPI-IO using MPI file views and datatypes.