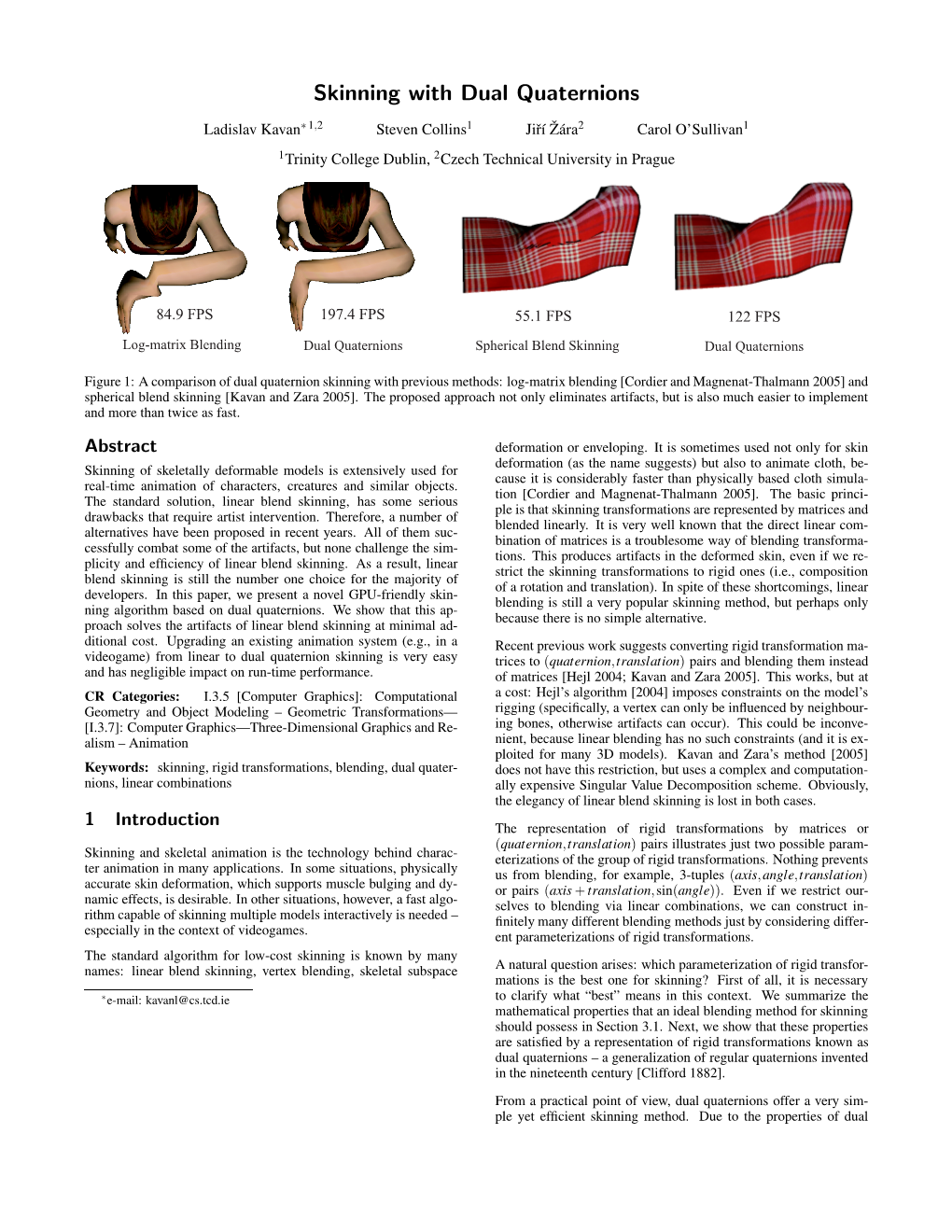
Skinning with Dual Quaternions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Application of Dual Quaternions on Selected Problems
APPLICATION OF DUAL QUATERNIONS ON SELECTED PROBLEMS Jitka Prošková Dissertation thesis Supervisor: Doc. RNDr. Miroslav Láviˇcka, Ph.D. Plze ˇn, 2017 APLIKACE DUÁLNÍCH KVATERNIONU˚ NA VYBRANÉ PROBLÉMY Jitka Prošková Dizertaˇcní práce Školitel: Doc. RNDr. Miroslav Láviˇcka, Ph.D. Plze ˇn, 2017 Acknowledgement I would like to thank all the people who have supported me during my studies. Especially many thanks belong to my family for their moral and material support and my advisor doc. RNDr. Miroslav Láviˇcka, Ph.D. for his guidance. I hereby declare that this Ph.D. thesis is completely my own work and that I used only the cited sources. Plzeˇn, July 20, 2017, ........................... i Annotation In recent years, the study of quaternions has become an active research area of applied geometry, mainly due to an elegant and efficient possibility to represent using them ro- tations in three dimensional space. Thanks to their distinguished properties, quaternions are often used in computer graphics, inverse kinematics robotics or physics. Furthermore, dual quaternions are ordered pairs of quaternions. They are especially suitable for de- scribing rigid transformations, i.e., compositions of rotations and translations. It means that this structure can be considered as a very efficient tool for solving mathematical problems originated for instance in kinematics, bioinformatics or geodesy, i.e., whenever the motion of a rigid body defined as a continuous set of displacements is investigated. The main goal of this thesis is to provide a theoretical analysis and practical applications of the dual quaternions on the selected problems originated in geometric modelling and other sciences or various branches of technical practise. -

The 22Nd International Conference on Finite Or Infinite Dimensional
The 22nd International Conference on Finite or Infinite Dimensional Complex Analysis and Applications August 8{August 11, 2014 Dongguk University Gyeongju, Republic of Korea The 22nd International Conference on Finite or Infinite Dimensional Complex Analysis and Applications http://22.icfidcaa.org August 8{11, 2014 Dongguk University Gyeongju, Republic of Korea Organized by • Dongguk University (Gyeongju Campus) • Youngnam Mathematical Society • BK21PLUS Center for Math Research and Education at PNU • Gyeongsang National University Supported by • KOFST (The Korean Federation of Science and Technology Societies) August 2, 2014 Contents Preface, Welcome and Acknowledgements ..................................1 Committee ......................................................................3 Topics of Conference ...........................................................4 History and Publications ......................................................5 Welcome Address ..............................................................8 Outline of Activities ...........................................................9 Details of Activities ..........................................................12 Abstracts of Talks .............................................................30 1 Preface, Welcome and Acknowledgements The 22nd International Conference on Finite or Infinite Dimensional Complex Analy- sis and Applications is being held at Dongguk University (Gyeongju), continuing to The 16th International Conference on Finite or Infinite Dimensional Complex -

Exponential and Cayley Maps for Dual Quaternions
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by LSBU Research Open Exponential and Cayley maps for Dual Quaternions J.M. Selig Abstract. In this work various maps between the space of twists and the space of finite screws are studied. Dual quaternions can be used to represent rigid-body motions, both finite screw motions and infinitesimal motions, called twists. The finite screws are elements of the group of rigid-body motions while the twists are elements of the Lie algebra of this group. The group of rigid-body displacements are represented by dual quaternions satisfying a simple relation in the algebra. The space of group elements can be though of as a six-dimensional quadric in seven-dimensional projective space, this quadric is known as the Study quadric. The twists are represented by pure dual quaternions which satisfy a degree 4 polynomial relation. This means that analytic maps between the Lie algebra and its Lie group can be written as a cubic polynomials. In order to find these polynomials a system of mutually annihilating idempotents and nilpotents is introduced. This system also helps find relations for the inverse maps. The geometry of these maps is also briefly studied. In particular, the image of a line of twists through the origin (a screw) is found. These turn out to be various rational curves in the Study quadric, a conic, twisted cubic and rational quartic for the maps under consideration. Mathematics Subject Classification (2000). Primary 11E88; Secondary 22E99. Keywords. Dual quaternions, exponential map, Cayley map. -

Dual Quaternion Sample Reduction for SE(2) Estimation
Dual Quaternion Sample Reduction for SE(2) Estimation Kailai Li, Florian Pfaff, and Uwe D. Hanebeck Intelligent Sensor-Actuator-Systems Laboratory (ISAS) Institute for Anthropomatics and Robotics Karlsruhe Institute of Technology (KIT), Germany [email protected], fl[email protected], [email protected] Abstract—We present a novel sample reduction scheme for random variables belonging to the SE(2) group by means of Dirac mixture approximation. For this, dual quaternions are employed to represent uncertain planar transformations. The Cramer–von´ Mises distance is modified as a smooth metric to measure the statistical distance between Dirac mixtures on the manifold of planar dual quaternions. Samples of reduced size are then ob- tained by minimizing the probability divergence via Riemannian optimization while interpreting the correlation between rotation and translation. We further deploy the proposed scheme for non- parametric modeling of estimates for nonlinear SE(2) estimation. Simulations show superior tracking performance of the sample reduction-based filter compared with Monte Carlo-based as well as parametric model-based planar dual quaternion filters. Figure 1: Examples of the proposed sample reduction tech- I. INTRODUCTION nique for planar rigid motions. Here, 2000 random samples Estimation of planar motions is ubiquitous and play a (yellow) drawn from different underlying distributions are fundamental role in many application scenarios, such as optimally approximated by 20 samples (blue) on the manifold odometry and scene reconstruction, object tracking as well of planar dual quaternions. as remote sensing, etc [1]–[5]. Planar motions, incorporating both rotations and translations on a plane, are mathematically described by elements belonging to the two-dimensional spe- which can be easily violated under large noise levels (e.g., cial Euclidean group SE(2). -

Representing the Motion of Objects in Contact Using Dual Quaternions and Its Applications
Representing the Motion of Objects in Contact using Dual Quaternions and its Applications George V Paul and Katsushi Ikeuchi August 1 1997 CMU-RI-TR-97-31 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213-3890 © 1997 Carnegie Mellon University This work was done partly at the Robotics Institute, Carnegie Mellon University, Pitts- burgh PA, and partly at the Institute of Industrial Science, University of Tokyo, Tokyo, Japan. iii Abstract This report presents a general method for representing the motion of an object while maintaining contact with other fixed objects. The motivation for our work is the assembly plan from observation (APO) system. The APO system observes a human perform an assembly task. It then analyzes the observations to reconstruct the assembly plan used in the task. Finally, the APO converts the assembly plan into a program for a robot which can repeat the demonstrated task. The position and orientation of an object, known as its configuration can be represented using dual vectors. We use dual quaternions to represent the configuration of objects in 3D space. When an object maintains a set of contacts with other fixed objects, its configuration will be constrained to lie on a surface in configuration space called the c-surface. The c-sur- face is determined by the geometry of the object features in contact. We propose a general method to represent c-surfaces in dual vector space. Given a set of contacts, we choose a ref- erence contact and represent the c-surface as a parametric equation based on it. The contacts other than the reference contact will impose constraints on these parameters. -

Dual Quaternions in Spatial Kinematics in an Algebraic Sense
Turk J Math 32 (2008) , 373 – 391. c TUB¨ ITAK˙ Dual Quaternions in Spatial Kinematics in an Algebraic Sense Bedia Akyar Abstract This paper presents the finite spatial displacements and spatial screw motions by using dual quaternions and Hamilton operators. The representations are considered as 4 × 4 matrices and the relative motion for three dual spheres is considered in terms of Hamilton operators for a dual quaternion. The relation between Hamilton operators and the transformation matrix has been given in a different way. By considering operations on screw motions, representation of spatial displacements is also given. Key Words: Dual quaternions, Hamilton operators, Lie algebras. 1. Introduction The matrix representation of spatial displacements of rigid bodies has an important role in kinematics and the mathematical description of displacements. Veldkamp and Yang-Freudenstein investigated the use of dual numbers, dual numbers matrix and dual quaternions in instantaneous spatial kinematics in [9] and [10], respectively. In [10], an application of dual quaternion algebra to the analysis of spatial mechanisms was given. A comparison of representations of general spatial motion was given by Rooney in [8]. Hiller- Woernle worked on a unified representation of spatial displacements. In their paper [7], the representation is based on the screw displacement pair, i.e., the dual number extension of the rotational displacement pair, and consists of the dual unit vector of the screw axis AMS Mathematics Subject Classification: 53A17, 53A25, 70B10. 373 AKYAR and the associate dual angle of the amplitude. Chevallier gave a unified algebraic approach to mathematical methods in kinematics in [4]. This approach requires screw theory, dual numbers and Lie groups. -

Homothetic Motions with Dual Octonions in Dual 8−Space
Turkish Journal of Mathematics Turk J Math (2016) 40: 90 { 97 http://journals.tubitak.gov.tr/math/ ⃝c TUB¨ ITAK_ Research Article doi:10.3906/mat-1505-84 Homothetic motions with dual octonions in dual 8−space Hesna KABADAYI∗ Department of Mathematics, Ankara University, Ankara, Turkey Received: 25.05.2015 • Accepted/Published Online: 21.07.2015 • Final Version: 01.01.2016 Abstract: In this study, for dual octonions in dual 8−space D8 over the domain of coefficients D; we give a matrix that is similar to a Hamilton operator. By means of this matrix a new motion is defined and this motion is proven to be homothetic. For this one parameter dual homothetic motion, we prove some theorems about dual velocities, dual pole points, and dual pole curves. Furthermore, after defining dual accelerations, we show that the motion defined by the regular order m dual curve, at every t-instant, has only one acceleration center of order (m − 1) : Key words: Dual octonions, homothetic motion, dual curve, dual space 1. Introduction John T. Graves discovered octonions in 1843. Arthur Cayley also discovered them independently and, on account of this, they are sometimes referred to as Cayley numbers. The octonions form a normed division algebra over real numbers. They are nonassociative and non- commutative but alternative, which is a weaker form of associativity. Octonions have applications in string theory, special relativity, and quantum logic. They have some interesting features and are related to a number of exceptional structures, such as exceptional Lie groups, in mathematics. { } The set of dual numbers D = ba = a + "a∗ : " =6 0;"2 = 0; a; a∗ 2 R is a commutative ring with a unit. -

Inverse Kinematics with Dual-Quaternions, Exponential-Maps, and Joint Limits
International Journal on Advances in Intelligent Systems, vol 6 no 1 & 2, year 2013, http://www.iariajournals.org/intelligent_systems/ 53 Inverse Kinematics with Dual-Quaternions, Exponential-Maps, and Joint Limits Ben Kenwright Newcastle University School of Computing Science United Kingdom [email protected] Abstract—We present a novel approach for solving articu- is an iterative, efficient, low memory method of solving lated inverse kinematic problems (e.g., character structures) linear systems of equations of the form Ax = b. Hence, by means of an iterative dual-quaternion and exponential- we integrate the Gauss-Seidel iterative algorithm with an mapping approach. As dual-quaternions are a break from the norm and offer a straightforward and computationally efficient articulated IK problem to produce a flexible whole system technique for representing kinematic transforms (i.e., position IK solution for time critical systems, such as games. This and translation). Dual-quaternions are capable of represent method is used as it offers a flexible, robust solution with both translation and rotation in a unified state space variable the ability to trade accuracy for speed and give good visual with its own set of algebraic equations for concatenation outcomes. and manipulation. Hence, an articulated structure can be represented by a set of dual-quaternion transforms, which we Furthermore, to make the Gauss-Seidel method a practical can manipulate using inverse kinematics (IK) to accomplish IK solution for an articulated hand structure, it needs to specific goals (e.g., moving end-effectors towards targets). We enforce joint limits. We incorporate joint limits by modi- use the projected Gauss-Seidel iterative method to solve the IK fying the update scheme to include an iterative projection problem with joint limits. -

Space Kinematics and Projective Differential Geometry Over the Ring
Space Kinematics and Projective Differential Geometry Over the Ring of Dual Numbers∗ Johannes Siegele, Hans-Peter Schröcker, Martin Pfurner Department of Basic Sciences in Engineering Sciences University of Innsbruck, Austria February 5, 2021 Abstract We study an isomorphism between the group of rigid body displacements and the group of dual quaternions modulo the dual number multiplicative group from the viewpoint of differential geometry in a projective space over the dual numbers. Some seemingly weird phenomena in this space have lucid kinematic interpretations. An example is the existence of non-straight curves with a continuum of osculating tangents which correspond to motions in a cylinder group with osculating vertical Darboux motions. We also suggest geometrically meaningful ways to select osculating conics of a curve in this projective space and illustrate their corresponding motions. Furthermore, we investigate factorizability of these special motions and use the obtained results for the construction of overconstrained linkages. Key Words: rational motion, motion polynomial, factorization, vertical Darboux motion, helical motion, osculating line, osculating conic, null cone motion, linkage MSC 2020: 16S36 53A20 70B10 1 Introduction The eight-dimensional real algebra DH of dual quaternions provides a well-known model for the group SE(3) of rigid body displacements. Dual quaternions with non-zero real norm represent elements of SE(3) and are uniquely determined up to real scalar multiples. In the ∼ 7 projectivization P(DH) = P (R) they correspond to points of the Study quadric S minus an exceptional subspace E of dimension three [5]. The Study quadric model provides a rich geometric and algebraic environment for investi- arXiv:2006.14259v3 [math.DG] 4 Feb 2021 gating questions of space kinematics. -

Exploring Group Theory and Topology for Analyzing the Structure of Biology
Noname manuscript No. (will be inserted by the editor) Exploring group theory and topology for analyzing the structure of biology Shun Adachi Received: date / Accepted: date Abstract The concepts of population and species play a fundamental role in biology. The existence and precise definition of higher-order hierarchies, such as division into species, is open to debate among biologists. First, we seek to show a fractal structure of species. We are able to define a species as a p-Sylow subgroup of a particular community in a single niche, confirmed by topological analysis. We named this model the patch with zeta dominance (PzDom) model. Next, the topological nature of the system is carefully examined and for test- ing purposes, species density data are used in conjunction with data derived from liquid-chromatography mass spectrometry of proteins. We confirm the induction of hierarchy and time through a one-dimensional probability space with certain topologies. For further clarification of induced fractals including the relation to renormal- ization in physics, a theoretical development is proposed based on a newly identified fact, namely that scaling parameters for magnetization exactly cor- respond to imaginary parts of the Riemann zeta function’s nontrivial zeros. A master torus and a Lagrangian/Hamiltonian are derived expressing fractal structures as a solution for diminishing divergent terms in renormalization. We will also focus on an application of our developed model. We extend current PzDom model to the so-called exPzDom model to qualify population dynamics as a topological matter as a whole, not focusing on hierarchy. The indicators in the exPzDom model adhere well to the empirical dynamics of SARS-CoV-2 infected people and align appropriately with actual policies instituted by the S. -

Approaching Dual Quaternions from Matrix Algebra Federico Thomas, Member, IEEE
SUBMITTED TO THE IEEE TRANSACTIONS ON ROBOTICS 1 Approaching Dual Quaternions From Matrix Algebra Federico Thomas, Member, IEEE Abstract—Dual quaternions give a neat and succinct way on Computer Vision, Robot Kinematics and Dynamics, or to encapsulate both translations and rotations into a unified Computer Graphics. representation that can easily be concatenated and interpolated. Unfortunately, the combination of quaternions and dual numbers Surprisingly, despite their long life, the use of quaternions in seem quite abstract and somewhat arbitrary when approached engineering is not free from confusions which mainly concern: for the first time. Actually, the use of quaternions or dual num- bers separately are already seen as a break in mainstream robot kinematics, which is based on homogeneous transformations. This 1) The order of quaternion multiplication. Quaternions are paper shows how dual quaternions arise in a natural way when sometimes multiplied in the opposite order than rotation approximating 3D homogeneous transformations by 4D rotation matrices, as in [4]. The origin of this can be found in matrices. This results in a seamless presentation of rigid-body the way vector coordinates are represented. For example, transformations based on matrices and dual quaternions which in [5], a celebrated book on Computer Graphics, point permits building intuition about the use of quaternions and their generalizations. coordinates are represented by row vectors instead of column vectors, as is the common practice in Robotics. Index Terms —Spatial kinematics, quaternions, biquaternions, Then, transformation matrices post-multiply a point double quaternions, dual quaternions, Cayley factorization. vector to produce a new point vector. When using quaternions, instead of homogeneous transformations, I. -
Robot Kinematic Modeling and Control Based on Dual Quaternion Algebra — Part I: Fundamentals
Robot Kinematic Modeling and Control Based on Dual Quaternion Algebra — Part I: Fundamentals. Bruno Vilhena Adorno To cite this version: Bruno Vilhena Adorno. Robot Kinematic Modeling and Control Based on Dual Quaternion Algebra — Part I: Fundamentals.. 2017. hal-01478225 HAL Id: hal-01478225 https://hal.archives-ouvertes.fr/hal-01478225 Preprint submitted on 28 Feb 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution - NonCommercial - NoDerivatives| 4.0 International License Robot Kinematic Modeling and Control Based on Dual Quaternion Algebra Part I: Fundamentals Bruno Vilhena Adorno Department of Electrical Engineering, Federal University of Minas Gerais (UFMG) Current address: Av. Antônio Carlos 6627, Belo Horizonte, MG 31270-010 Brazil E-mail address: [email protected] URL: www.ppgee.ufmg.br/~adorno Abstract. This is the first part of a three-part tutorial on dual quaternion algebra applied to robotics, whose goal is to help readers grasp the main ideas behind dual quaternions and their application to robot kinematic modeling and control. Part I presents the fundamentals of dual quaternion algebra, starting from the basic definitions of complex numbers and rotations in the plane and then extending the idea to rigid motions in the tridimensional case by means of quater- nions and dual quaternions.