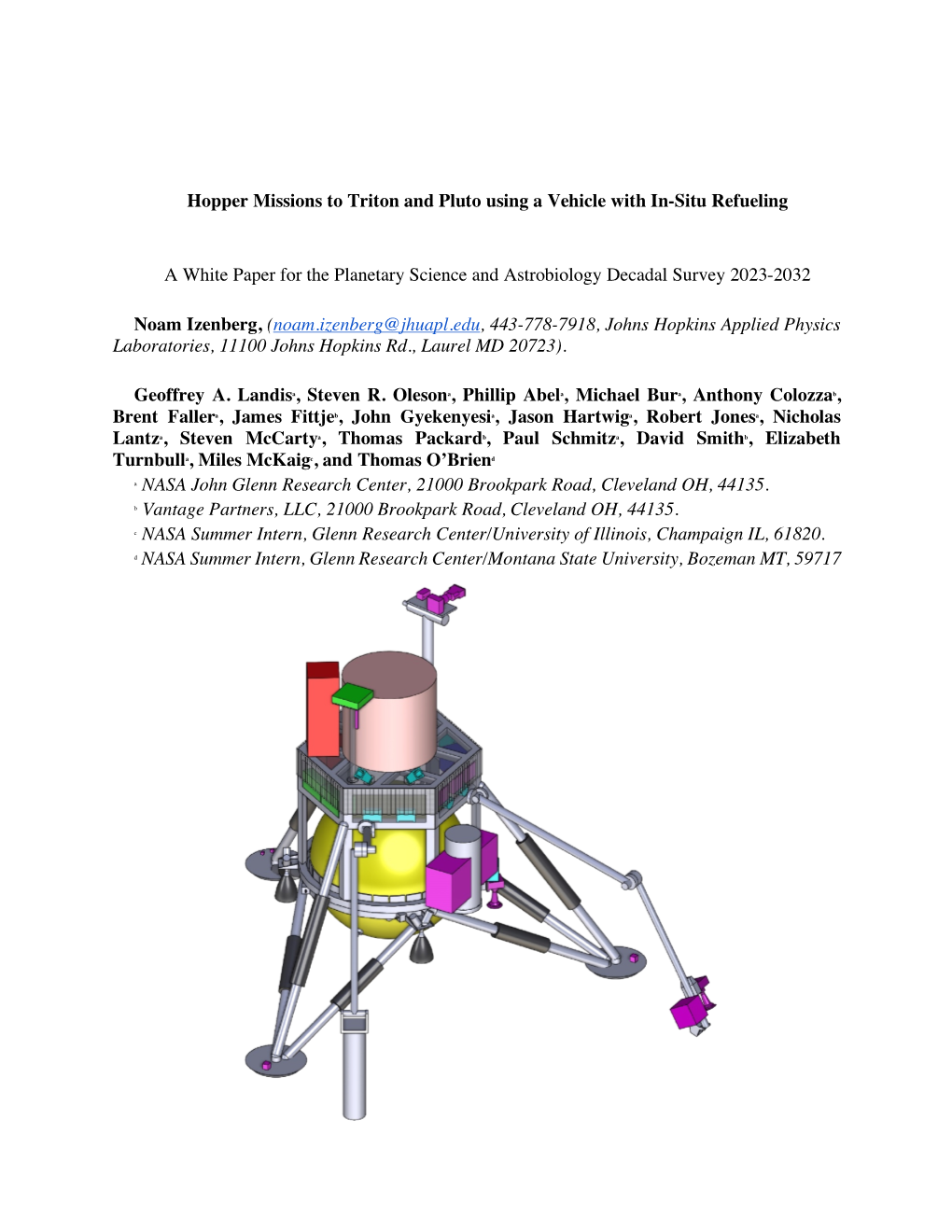
Hopper Missions to Triton and Pluto Using a Vehicle with In-Situ Refueling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

GAME of MOONS a TALE of ICE and FIRE 3 × 50 Min
© NASA SCIENCE GAME OF MOONS A TALE OF ICE AND FIRE 3 × 50 min. Written and produced by Ivo Filatsch 4K, 5.1 and Stereo Executive Producer: Sabine Holzer Join us on a spectacular rollercoaster ride through our solar system! This three-part series explores alien worlds of extremes right in our celestial neighbourhood, each single one amazing, fascinating, and unique in its own way. veryone knows the moon — our Moon … case for Triton. It circles around Neptune in the It may come as a surprise, but there are opposite direction — in a retrograde orbit. more than 200 of these natural satellites But this brings a problem: the laws of physics orbiting other planets in the solar system! dictate that in this situation, Triton is being EAll these moons are incredibly different regarding slowed down all the while, this way getting ever their size, but also in terms of their environments. closer to Neptune. Studying these alien worlds in detail is important. Scientists have calculated that in about 100 Thanks to the insights scientists are getting million years from now, Triton will reach its Roche through observations, measurements, and radius. This is the zone where the gravitational conclusions, we all get a better understanding of forces of Neptune will become too strong to our world as a whole. withstand — and Triton will be ripped apart into pieces … And the better we understand our neighbour- hood, the better we get to know our home planet CHAPTER 2: LIFE … Our moon is much more than just a nice decora- tion in the night sky. -

Pluto, Titan, and Triton: How Do Their Haze Properties Compare? B. J. Buratti1, J
51st Lunar and Planetary Science Conference (2020) 1168.pdf Pluto, Titan, and Triton: How do their Haze Properties Compare? B. J. Buratti1, J. D. Hillier2, J. D. Hofgart- ner2, M. D. Hicks1, 1Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109; bon- [email protected]; 2Grays Harbor College, Aberdeen, WA 98520. Introduction: The July 2015 encounter of the New Horizons spacecraft with Pluto brought a large Kuiper Belt Object into sharp focus for the first time [1]. In- struments on the spacecraft observed Pluto at solar phase angles not visible from the Earth, where the max- imum solar phase angle is about 2°. The large solar phase angles (>150°), are especially useful for charac- terizing the properties of Pluto’s haze. But key obser- vations were not made during the encounter because of the fast nature of the flyby. These included the small solar phase angles observable from Earth. Thus, the best data set is one consisting of both spacecraft and ground-based data. We have combined Earth-based observations, in- cluding those from the Palomar Adaptive Optics (AO) system, to construct a complete solar phase curve of Figure 1: Charon and Pluto from the Palomar Pluto. Using the classical radiative transfer model of adaptive optics system. Chandrasekhar’s “Planetary Problem” (2,3) we have fit Data from the spacecraft are summarized in Table physical parameters to the surface and haze of Pluto. 2. Comparison with the properties of Titan’s haze shows Table 1- New Horizons Data used in this Study. that both worlds are factories for producing reddish, organic rich molecules. -

An Investigation of Aerogravity Assist at Titan and Triton for Capture Into Orbit About Saturn and Neptune 2Nd International Planetary Probe Workshop August 2004, USA
An Investigation of Aerogravity Assist at Titan and Triton for Capture into Orbit About Saturn and Neptune 2nd International Planetary Probe Workshop August 2004, USA Philip Ramsey(1) and James Evans Lyne(2) (1)Department of Mechanical, Aerospace and Biomedical Engineering The University of Tennessee Knoxville, TN 37996 USA [email protected] (2)Department of Mechanical, Aerospace and Biomedical Engineering The University of Tennessee Knoxville, TN 37996 USA [email protected] ABSTRACT proposed that an aerogravity assist maneuver at the moon Titan could be used to capture a probe Previous work by our group has shown that an into orbit about Saturn, using an aeroshell with a aerogravity assist maneuver at the moon Titan with a low to moderate lift-to-drag ratio (0.25 to could be used to capture a spacecraft into a 1.0).1 This approach provides for capture into closed orbit about Saturn if a nominal orbit about the gas giant, while avoiding the atmospheric profile at Titan is assumed. The very high entry speeds and aerothermal heating present study extends that work and examines environment inherent to a trajectory thru the the impact of atmospheric dispersions, variations atmosphere of Saturn itself. in the final target orbit and low density aerodynamics on the aerocapture maneuver. Titan is unique among moons in the solar Accounting for atmospheric dispersions system in that it has an atmosphere considerably substantially reduces the entry corridor width for thicker than Earth’s, with a ground level density a blunt configuration with a lift-to-drag ratio of of about 5.44 kg/m3. -
Dwarf Planet Ceres
Dwarf Planet Ceres drishtiias.com/printpdf/dwarf-planet-ceres Why in News As per the data collected by NASA’s Dawn spacecraft, dwarf planet Ceres reportedly has salty water underground. Dawn (2007-18) was a mission to the two most massive bodies in the main asteroid belt - Vesta and Ceres. Key Points 1/3 Latest Findings: The scientists have given Ceres the status of an “ocean world” as it has a big reservoir of salty water underneath its frigid surface. This has led to an increased interest of scientists that the dwarf planet was maybe habitable or has the potential to be. Ocean Worlds is a term for ‘Water in the Solar System and Beyond’. The salty water originated in a brine reservoir spread hundreds of miles and about 40 km beneath the surface of the Ceres. Further, there is an evidence that Ceres remains geologically active with cryovolcanism - volcanoes oozing icy material. Instead of molten rock, cryovolcanoes or salty-mud volcanoes release frigid, salty water sometimes mixed with mud. Subsurface Oceans on other Celestial Bodies: Jupiter’s moon Europa, Saturn’s moon Enceladus, Neptune’s moon Triton, and the dwarf planet Pluto. This provides scientists a means to understand the history of the solar system. Ceres: It is the largest object in the asteroid belt between Mars and Jupiter. It was the first member of the asteroid belt to be discovered when Giuseppe Piazzi spotted it in 1801. It is the only dwarf planet located in the inner solar system (includes planets Mercury, Venus, Earth and Mars). Scientists classified it as a dwarf planet in 2006. -

The Solar System Cause Impact Craters
ASTRONOMY 161 Introduction to Solar System Astronomy Class 12 Solar System Survey Monday, February 5 Key Concepts (1) The terrestrial planets are made primarily of rock and metal. (2) The Jovian planets are made primarily of hydrogen and helium. (3) Moons (a.k.a. satellites) orbit the planets; some moons are large. (4) Asteroids, meteoroids, comets, and Kuiper Belt objects orbit the Sun. (5) Collision between objects in the Solar System cause impact craters. Family portrait of the Solar System: Mercury, Venus, Earth, Mars, Jupiter, Saturn, Uranus, Neptune, (Eris, Ceres, Pluto): My Very Excellent Mother Just Served Us Nine (Extra Cheese Pizzas). The Solar System: List of Ingredients Ingredient Percent of total mass Sun 99.8% Jupiter 0.1% other planets 0.05% everything else 0.05% The Sun dominates the Solar System Jupiter dominates the planets Object Mass Object Mass 1) Sun 330,000 2) Jupiter 320 10) Ganymede 0.025 3) Saturn 95 11) Titan 0.023 4) Neptune 17 12) Callisto 0.018 5) Uranus 15 13) Io 0.015 6) Earth 1.0 14) Moon 0.012 7) Venus 0.82 15) Europa 0.008 8) Mars 0.11 16) Triton 0.004 9) Mercury 0.055 17) Pluto 0.002 A few words about the Sun. The Sun is a large sphere of gas (mostly H, He – hydrogen and helium). The Sun shines because it is hot (T = 5,800 K). The Sun remains hot because it is powered by fusion of hydrogen to helium (H-bomb). (1) The terrestrial planets are made primarily of rock and metal. -

A New View of Haze Formation and Energy Balance in Triton's Cold And
EPSC Abstracts Vol. 13, EPSC-DPS2019-332-1, 2019 EPSC-DPS Joint Meeting 2019 c Author(s) 2019. CC Attribution 4.0 license. A New View of Haze Formation and Energy Balance in Triton’s Cold and Hazy Atmosphere Xi Zhang (1), Kazumasa Ohno (2), Darrell Strobel (3), Ryo Tazaki (4), and Satoshi Okuzumi (2) (1) University of California Santa Cruz, Santa Cruz, USA ([email protected]), (2) Tokyo Institute of Technology, Tokyo, Japan, (3) Johns Hopkins University, Baltimore, USA, (4) Tohoku University, Sendai, Japan Abstract missing coolant is needed to understand the energy balance in Triton’s lower atmosphere. This research on Neptune’s moon Triton consists of two parts. To start we built the first microphysical 2. Methods model of Triton haze formation including fractal aggregation of monomers and condensation of We have built the first bin-scheme microphysical supersaturated hydrocarbons and nitriles. Our model model for Triton’s haze and cloud formation. Our can explain the UV occultation and visible scattering model simulates the evolution of size distributions in observations from Voyager 2 spacecraft during the a one-dimensional framework with sedimentation, Neptune flyby. With our model we find that haze coagulation, condensation and vertical eddy mixing. particles play a dominant role in the energy balance We consider that the haze particles are initially in the lower atmosphere of Triton, which was composed of fractal aggregates—non-spherical neglected in previous studies. Future ice giant particles comprised of many many spherical missions with a Triton lander should be able to monomers—similar in previous studies on Titan and measure the infrared fluxes from the near-surface Pluto (e.g., Cabane et al. -

Neptune Polar Orbiter with Probes*
NEPTUNE POLAR ORBITER WITH PROBES* 2nd INTERNATIONAL PLANETARY PROBE WORKSHOP, AUGUST 2004, USA Bernard Bienstock(1), David Atkinson(2), Kevin Baines(3), Paul Mahaffy(4), Paul Steffes(5), Sushil Atreya(6), Alan Stern(7), Michael Wright(8), Harvey Willenberg(9), David Smith(10), Robert Frampton(11), Steve Sichi(12), Leora Peltz(13), James Masciarelli(14), Jeffrey Van Cleve(15) (1)Boeing Satellite Systems, MC W-S50-X382, P.O. Box 92919, Los Angeles, CA 90009-2919, [email protected] (2)University of Idaho, PO Box 441023, Moscow, ID 83844-1023, [email protected] (3)JPL, 4800 Oak Grove Blvd., Pasadena, CA 91109-8099, [email protected] (4)NASA Goddard Space Flight Center, Greenbelt, MD 20771, [email protected] (5)Georgia Institute of Technology, 320 Parian Run, Duluth, GA 30097-2417, [email protected] (6)University of Michigan, Space Research Building, 2455 Haward St., Ann Arbor, MI 48109-2143, [email protected] (7)Southwest Research Institute, Department of Space Studies, 1050 Walnut St., Suite 400, Boulder, CO 80302, [email protected] (8)NASA Ames Research Center, Moffett Field, CA 94035-1000, [email protected] (9)4723 Slalom Run SE, Owens Cross Roads, AL 35763, [email protected] (10) Boeing NASA Systems, MC H013-A318, 5301 Bolsa Ave., Huntington Beach, CA 92647-2099, [email protected] (11)Boeing NASA Systems, MC H012-C349, 5301 Bolsa Ave., Huntington Beach, CA 92647-2099 [email protected] (12)Boeing Satellite Systems, MC W-S50-X382, P.O. Box 92919, Los Angeles, CA 90009-2919, [email protected] (13) )Boeing NASA Systems, MC H013-C320, 5301 Bolsa Ave., Huntington Beach, CA 92647-2099, [email protected] (14)Ball Aerospace & Technologies Corp., P.O. -

1 on the Origin of the Pluto System Robin M. Canup Southwest Research Institute Kaitlin M. Kratter University of Arizona Marc Ne
On the Origin of the Pluto System Robin M. Canup Southwest Research Institute Kaitlin M. Kratter University of Arizona Marc Neveu NASA Goddard Space Flight Center / University of Maryland The goal of this chapter is to review hypotheses for the origin of the Pluto system in light of observational constraints that have been considerably refined over the 85-year interval between the discovery of Pluto and its exploration by spacecraft. We focus on the giant impact hypothesis currently understood as the likeliest origin for the Pluto-Charon binary, and devote particular attention to new models of planet formation and migration in the outer Solar System. We discuss the origins conundrum posed by the system’s four small moons. We also elaborate on implications of these scenarios for the dynamical environment of the early transneptunian disk, the likelihood of finding a Pluto collisional family, and the origin of other binary systems in the Kuiper belt. Finally, we highlight outstanding open issues regarding the origin of the Pluto system and suggest areas of future progress. 1. INTRODUCTION For six decades following its discovery, Pluto was the only known Sun-orbiting world in the dynamical vicinity of Neptune. An early origin concept postulated that Neptune originally had two large moons – Pluto and Neptune’s current moon, Triton – and that a dynamical event had both reversed the sense of Triton’s orbit relative to Neptune’s rotation and ejected Pluto onto its current heliocentric orbit (Lyttleton, 1936). This scenario remained in contention following the discovery of Charon, as it was then established that Pluto’s mass was similar to that of a large giant planet moon (Christy and Harrington, 1978). -

Comparative Kbology: Using Surface Spectra of Triton
COMPARATIVE KBOLOGY: USING SURFACE SPECTRA OF TRITON, PLUTO, AND CHARON TO INVESTIGATE ATMOSPHERIC, SURFACE, AND INTERIOR PROCESSES ON KUIPER BELT OBJECTS by BRYAN JASON HOLLER B.S., Astronomy (High Honors), University of Maryland, College Park, 2012 B.S., Physics, University of Maryland, College Park, 2012 M.S., Astronomy, University of Colorado, 2015 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirement for the degree of Doctor of Philosophy Department of Astrophysical and Planetary Sciences 2016 This thesis entitled: Comparative KBOlogy: Using spectra of Triton, Pluto, and Charon to investigate atmospheric, surface, and interior processes on KBOs written by Bryan Jason Holler has been approved for the Department of Astrophysical and Planetary Sciences Dr. Leslie Young Dr. Fran Bagenal Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. ii ABSTRACT Holler, Bryan Jason (Ph.D., Astrophysical and Planetary Sciences) Comparative KBOlogy: Using spectra of Triton, Pluto, and Charon to investigate atmospheric, surface, and interior processes on KBOs Thesis directed by Dr. Leslie Young This thesis presents analyses of the surface compositions of the icy outer Solar System objects Triton, Pluto, and Charon. Pluto and its satellite Charon are Kuiper Belt Objects (KBOs) while Triton, the largest of Neptune’s satellites, is a former member of the KBO population. Near-infrared spectra of Triton and Pluto were obtained over the previous 10+ years with the SpeX instrument at the IRTF and of Charon in Summer 2015 with the OSIRIS instrument at Keck. -

Climate Models of Triton and Pluto
Climate models of Triton and Pluto Mélanie Vangvichith and François Forget Laboratoire de Météorologie Dynamique, IPSL, Paris, France ([email protected]) We have developed two kinds of models: a 3D general circulation model of Triton and Pluto's atmosphere and a 2D model to predict the long-term evolution of the N2 frost's distribution on these 2 bodies. 3D Model of Triton's atmosphere : The General Circulation Model includes parameterizations of 1) the N2 condensation and sublimation both in the atmosphere and on the ground, 2) the vertical turbulent mixing and the convection in the planetary boundary layer, 3) the radiative transfer due to methane and carbon monoxide (using the correlated k method), 4) the molecular thermal conduction with a prescribed flux at the top of the model representing heating from the upper atmosphere and 5) a surface and subsurface thermal model with 22 layers. The dynamical core employs a grid point model composed of 32 longitudes, 24 latitudes and 25 layers distributed from the surface to about 45 km. Simulations have been performed assuming several realistic surface frost distributions and compared to the different observations of Voyager 2 : retrograde surface winds, prograde winds at 8 km, temperature profiles. We found that to match these observations, we must assume the presence of a N2 ice polar cap in the south and an unfrosted equatorial band, assuming a relatively high thermal inertia for the substrate (see below). To properly initialize the surface and subsurface temperature in the unfrosted area we initially perform energy balance calculations for thousands of therrestrial years. -

Atmospheres and Surfaces of Small Bodies and Dwarf Planets in the Kuiper Belt
EPJ Web of Conferences 9, 267–276 (2010) DOI: 10.1051/epjconf/201009021 c Owned by the authors, published by EDP Sciences, 2010 Atmospheres and surfaces of small bodies and dwarf planets in the Kuiper Belt E.L. Schallera Lunar and Planetary Laboratory, University of Arizona, Tucson, AZ 85721, USA Abstract. Kuiper Belt Objects (KBOs) are icy relics orbiting the sun beyond Neptune left over from the planetary accretion disk. These bodies act as unique tracers of the chemical, thermal, and dynamical history of our solar system. Over 1000 Kuiper Belt Objects (KBOs) and centaurs (objects with perihelia between the giant planets) have been discovered over the past two decades. While the vast majority of these objects are small (< 500 km in diameter), there are now many objects known that are massive enough to attain hydrostatic equilibrium (and are therefore considered dwarf planets) including Pluto, Eris, MakeMake, and Haumea. The discoveries of these large objects, along with the advent of large (> 6-meter) telescopes, have allowed for the first detailed studies of their surfaces and atmospheres. Visible and near-infrared spectroscopy of KBOs and centaurs has revealed a great diversity of surface compositions. Only the largest and coldest objects are capable of retaining volatile ices and atmospheres. Knowledge of the dynamics, physical properties, and collisional history of objects in the Kuiper belt is important for understanding solar system formation and evolution. 1 Introduction The existence of a belt of debris beyond Neptune left over from planetary accretion was proposed by Kuiper in 1951 [1]. Though Pluto was discovered in 1930, it took over sixty years for other Kuiper belt objects (KBOs) to be detected [2] and for Pluto to be recognized as the first known member of a larger population now known to consist of over 1000 objects (Fig. -

The Atmospheres of Pluto and Triton: Investigations with ALMA. M.A. Gurwell1, E
Pluto System After New Horizons 2019 (LPI Contrib. No. 2133) 7060.pdf The Atmospheres of Pluto and Triton: Investigations with ALMA. M.A. Gurwell1, E. Lellouch2, B.J. Butler3, R. Moreno4, A. Moullet5, D.F. Strobel6, and P. Lavvas7. 1Center for Astrophysics | Harvard & Smithsonian (Cam- bridge, MA 02138 USA; [email protected]), 2LESIA, Observatoire de Paris (92195 Meudon, France; em- [email protected]), 3National Radio Astronomy Observatory (Socorro, NM 87801 USA; bbut- [email protected]), 4LESIA, Observatoire de Paris (92195 Meudon, France; [email protected]), 5SOFIA Sci- ence Center, NASA Ames Research Center (Moffett Field, CA 94035 USA; [email protected]), 6Departments of Earth & Planetary Sciences and Physics & Astronomy, Johns Hopkins University (Baltimore, MD 21218 USA; [email protected]), 7GSMA, Université Reims Champagne-Ardenne (51687 Reims Cedex 2, France; panayotis.lav- [email protected]) Introduction: Pluto and Triton hold unique clues hyperfine structure of HCN; see Fig. 1), providing a for understanding the composition and evolution of the strong confirmation of the presence of CO, and the outer solar system, and are recognized as benchmarks first observation of HCN in Pluto's atmosphere. The for studies of the Kuiper Belt. They are two of the larg- results are detailed in [5] and summarized here. The est known and most easily observed KBO members CO and HCN lines probed Pluto's atmosphere up to (from Earth, but with caveats), and they are similar in ∼450 km and ∼900 km altitude, respectively. The CO many ways; for one example, they both possess thin mole fraction was 515 ± 40 ppm for a 12 µbar surface (10 microbar class), N2-dominated atmospheres.